 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-CAP: A Multi-Robot Connectivity-Aware Hierarchical Coverage Path Planning Algorithm for Unknown Environments
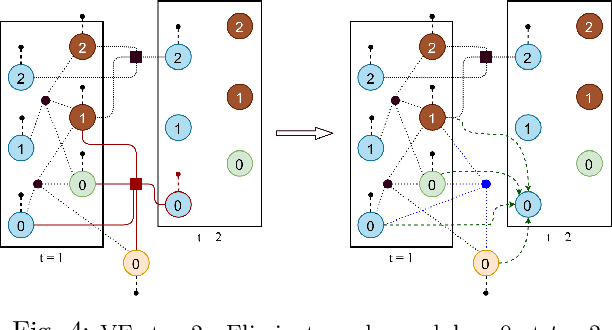
Sep 18, 2025Efficient coordination of multiple robots for coverage of large, unknown environments is a significant challenge that involves minimizing the total coverage path length while reducing inter-robot conflicts. In this paper, we introduce a Multi-robot Connectivity-Aware Planner (Multi-CAP), a hierarchical coverage path planning algorithm that facilitates multi-robot coordination through a novel connectivity-aware approach. The algorithm constructs and dynamically maintains an adjacency graph that represents the environment as a set of connected subareas. Critically, we make the assumption that the environment, while unknown, is bounded. This allows for incremental refinement of the adjacency graph online to ensure its structure represents the physical layout of the space, both in observed and unobserved areas of the map as robots explore the environment. We frame the task of assigning subareas to robots as a Vehicle Routing Problem (VRP), a well-studied problem for finding optimal routes for a fleet of vehicles. This is used to compute disjoint tours that minimize redundant travel, assigning each robot a unique, non-conflicting set of subareas. Each robot then executes its assigned tour, independently adapting its coverage strategy within each subarea to minimize path length based on real-time sensor observations of the subarea. We demonstrate through simulations and multi-robot hardware experiments that Multi-CAP significantly outperforms state-of-the-art methods in key metrics, including coverage time, total path length, and path overlap ratio. Ablation studies further validate the critical role of our connectivity-aware graph and the global tour planner in achieving these performance gains.
A Bayesian Modeling Framework for Estimation and Ground Segmentation of Cluttered Staircases
Jan 07, 2025



Autonomous robot navigation in complex environments requires robust perception as well as high-level scene understanding due to perceptual challenges, such as occlusions, and uncertainty introduced by robot movement. For example, a robot climbing a cluttered staircase can misinterpret clutter as a step, misrepresenting the state and compromising safety. This requires robust state estimation methods capable of inferring the underlying structure of the environment even from incomplete sensor data. In this paper, we introduce a novel method for robust state estimation of staircases. To address the challenge of perceiving occluded staircases extending beyond the robot's field-of-view, our approach combines an infinite-width staircase representation with a finite endpoint state to capture the overall staircase structure. This representation is integrated into a Bayesian inference framework to fuse noisy measurements enabling accurate estimation of staircase location even with partial observations and occlusions. Additionally, we present a segmentation algorithm that works in conjunction with the staircase estimation pipeline to accurately identify clutter-free regions on a staircase. Our method is extensively evaluated on real robot across diverse staircases, demonstrating significant improvements in estimation accuracy and segmentation performance compared to baseline approaches.
Modular, Resilient, and Scalable System Design Approaches -- Lessons learned in the years after DARPA Subterranean Challenge
Apr 27, 2024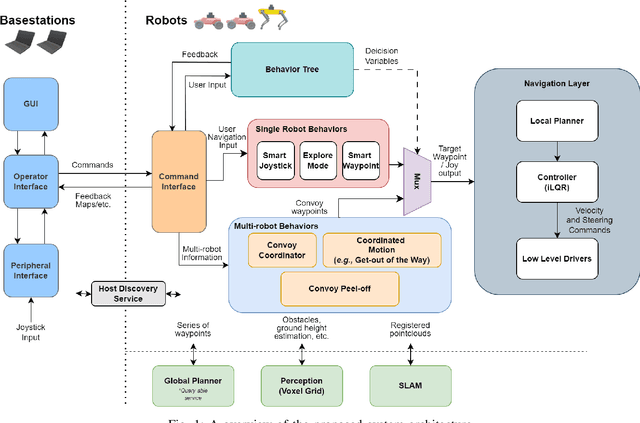
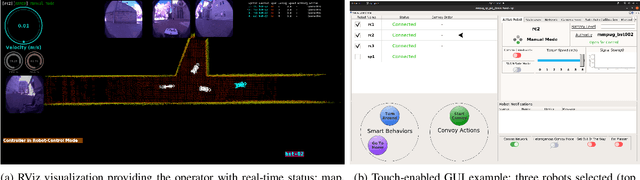
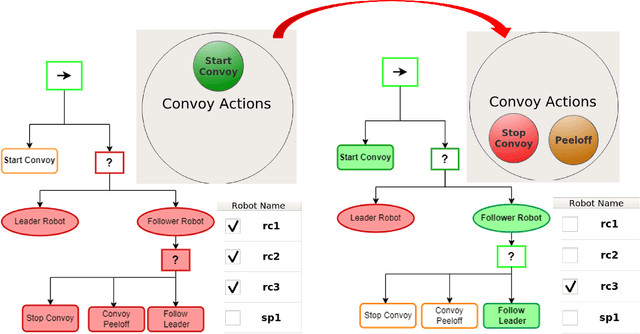
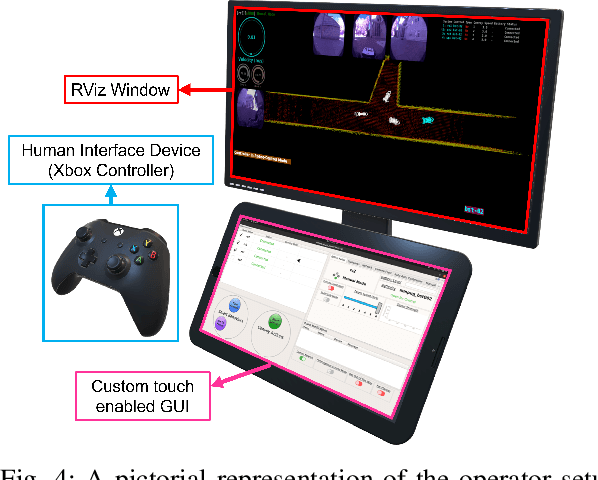
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team's participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy ("sliding mode autonomy"). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
Longitudinal Control Volumes: A Novel Centralized Estimation and Control Framework for Distributed Multi-Agent Sorting Systems
Feb 03, 2024



Centralized control of a multi-agent system improves upon distributed control especially when multiple agents share a common task e.g., sorting different materials in a recycling facility. Traditionally, each agent in a sorting facility is tuned individually which leads to suboptimal performance if one agent is less efficient than the others. Centralized control overcomes this bottleneck by leveraging global system state information, but it can be computationally expensive. In this work, we propose a novel framework called Longitudinal Control Volumes (LCV) to model the flow of material in a recycling facility. We then employ a Kalman Filter that incorporates local measurements of materials into a global estimation of the material flow in the system. We utilize a model predictive control algorithm that optimizes the rate of material flow using the global state estimate in real-time. We show that our proposed framework outperforms distributed control methods by 40-100% in simulation and physical experiments.
High Speed Convoy in Unstructured Indoor Environments
Nov 11, 2022Practical operations of coordinated fleets of mobile robots in different environments reveal benefits of maintaining small distances between robots as they move at higher speeds. This is counter-intuitive in that as speed increases, increased distances would give robots a larger time to respond to sudden motion variations in surrounding robots. However, there is a desire to have lower inter-robot distances in examples like autonomous trucks on highways to optimize energy by vehicle drafting or smaller robots in cluttered environments to maintain communication, etc. This work introduces a model based control framework that directly takes non-linear system dynamics into account. Each robot is able to follow closer at high speeds because it makes predictions on the state information from its adjacent robots and biases it's response by anticipating adjacent robots' motion. In contrast to existing controllers, our non-linear model based predictive decentralized controller is able to achieve lower inter-robot distances at higher speeds. We demonstrate the success of our approach through simulated and hardware results on mobile ground robots.
Fast Staircase Detection and Estimation using 3D Point Clouds with Multi-detection Merging for Heterogeneous Robots
Nov 01, 2022Robotic systems need advanced mobility capabilities to operate in complex, three-dimensional environments designed for human use, e.g., multi-level buildings. Incorporating some level of autonomy enables robots to operate robustly, reliably, and efficiently in such complex environments, e.g., automatically ``returning home'' if communication between an operator and robot is lost during deployment. This work presents a novel method that enables mobile robots to robustly operate in multi-level environments by making it possible to autonomously locate and climb a range of different staircases. We present results wherein a wheeled robot works together with a quadrupedal system to quickly detect different staircases and reliably climb them. The performance of this novel staircase detection algorithm that is able to run on the heterogeneous platforms is compared to the current state-of-the-art detection algorithm. We show that our approach significantly increases the accuracy and speed at which detections occur.
RGB-X Classification for Electronics Sorting
Sep 08, 2022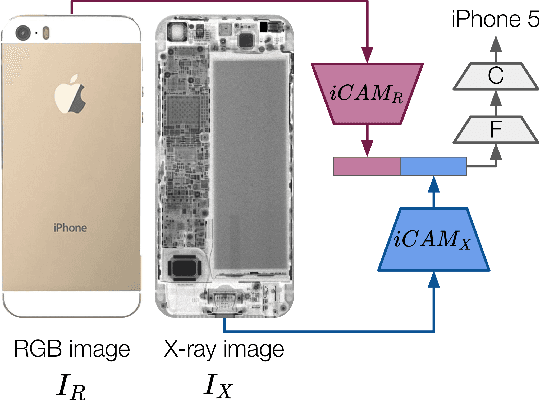


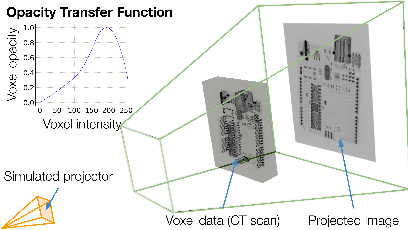
Effectively disassembling and recovering materials from waste electrical and electronic equipment (WEEE) is a critical step in moving global supply chains from carbon-intensive, mined materials to recycled and renewable ones. Conventional recycling processes rely on shredding and sorting waste streams, but for WEEE, which is comprised of numerous dissimilar materials, we explore targeted disassembly of numerous objects for improved material recovery. Many WEEE objects share many key features and therefore can look quite similar, but their material composition and internal component layout can vary, and thus it is critical to have an accurate classifier for subsequent disassembly steps for accurate material separation and recovery. This work introduces RGB-X, a multi-modal image classification approach, that utilizes key features from external RGB images with those generated from X-ray images to accurately classify electronic objects. More specifically, this work develops Iterative Class Activation Mapping (iCAM), a novel network architecture that explicitly focuses on the finer-details in the multi-modal feature maps that are needed for accurate electronic object classification. In order to train a classifier, electronic objects lack large and well annotated X-ray datasets due to expense and need of expert guidance. To overcome this issue, we present a novel way of creating a synthetic dataset using domain randomization applied to the X-ray domain. The combined RGB-X approach gives us an accuracy of 98.6% on 10 generations of modern smartphones, which is greater than their individual accuracies of 89.1% (RGB) and 97.9% (X-ray) independently. We provide experimental results3 to corroborate our results.
The Geometric Structure of Externally Actuated Planar Locomoting Systems in Ambient Media
Aug 14, 2021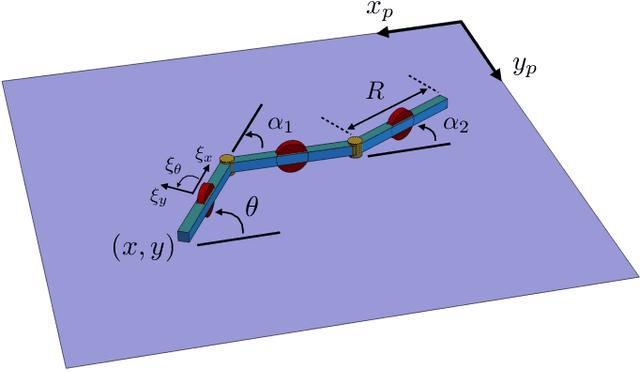


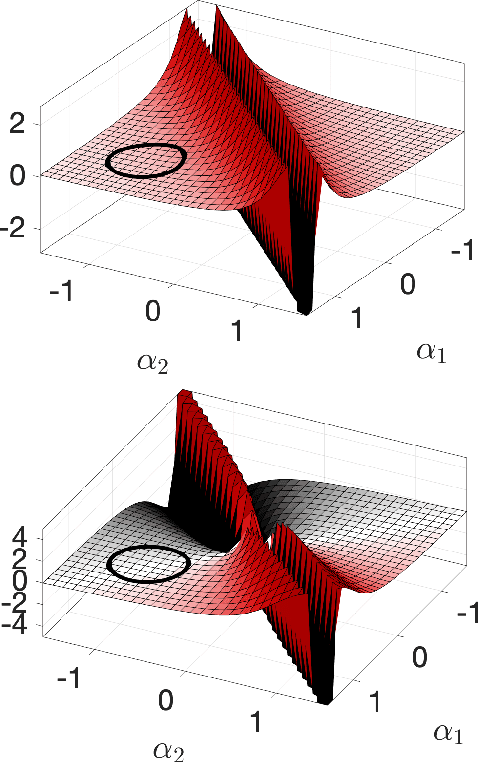
Robots often interact with the world via attached parts such as wheels, joints, or appendages. In many systems, these interactions, and the manner in which they lead to locomotion, can be understood using the machinery of geometric mechanics, explaining how inputs in the shape space of a robot affect motion in its configuration space and the configuration space of its environment. In this paper we consider an opposite type of locomotion, wherein robots are influenced actively by interactions with an externally forced ambient medium. We investigate two examples of externally actuated systems; one for which locomotion is governed by a principal connection, and is usually considered to possess no drift dynamics, and another for which no such connection exists, with drift inherent in its locomotion. For the driftless system, we develop geometric tools based on previously understood internally actuated versions of the system and demonstrate their use for motion planning under external actuation. For the system possessing drift, we employ nonholonomic reduction to obtain a reduced representation of the system dynamics, illustrate geometric features conducive to studying locomotion, and derive strategies for external actuation.
Learning Modular Robot Control Policies
May 20, 2021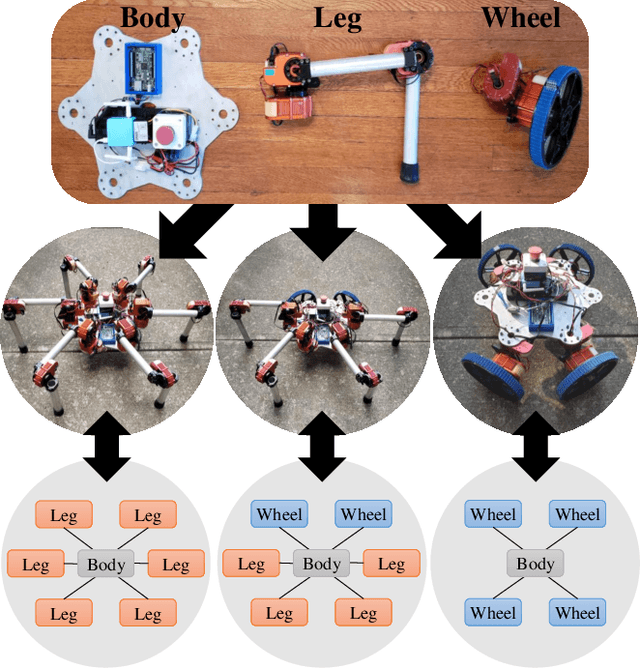



To make a modular robotic system both capable and scalable, the controller must be equally as modular as the mechanism. Given the large number of designs that can be generated from even a small set of modules, it becomes impractical to create a new system-wide controller for each design. Instead, we construct a modular control policy that handles a broad class of designs. We take the view that a module is both form and function, i.e. both mechanism and controller. As the modules are physically re-configured, the policy automatically re-configures to match the kinematic structure. This novel policy is trained with a new model-based reinforcement learning algorithm, which interleaves model learning and trajectory optimization to guide policy learning for multiple designs simultaneously. Training the policy on a varied set of designs teaches it how to adapt its behavior to the design. We show that the policy can then generalize to a larger set of designs not seen during training. We demonstrate one policy controlling many designs with different combinations of legs and wheels to locomote both in simulation and on real robots.
Optimal Control for Structurally Sparse Systems using Graphical Inference
Apr 07, 2021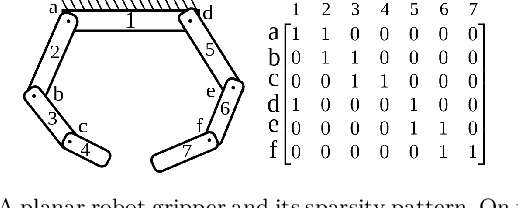
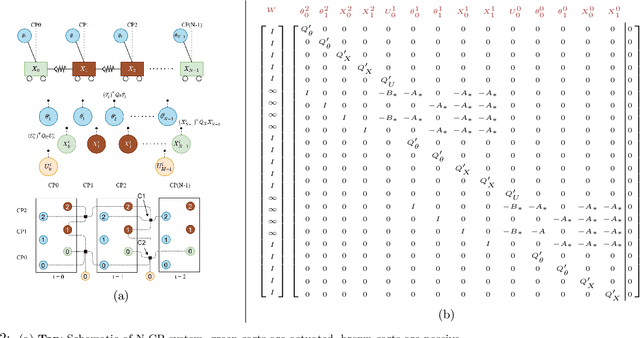
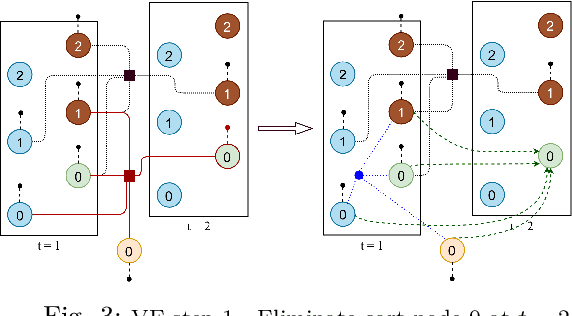
Dynamical systems with a distributed yet interconnected structure, like multi-rigid-body robots or large-scale multi-agent systems, introduce valuable sparsity into the system dynamics that can be exploited in an optimal control setting for speeding up computation and improving numerical conditioning. Conventional approaches for solving the Optimal Control Problem (OCP) rarely capitalize on such structural sparsity, and hence suffer from a cubic computational complexity growth as the dimensionality of the system scales. In this paper, we present an OCP formulation that relies on graphical models to capture the sparsely-interconnected nature of the system dynamics. Such a representational choice allows the use of contemporary graphical inference algorithms that enable our solver to achieve a linear time complexity in the state and control dimensions as well as the time horizon. We demonstrate the numerical and computational advantages of our approach on a canonical dynamical system in simulation.