 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular, Resilient, and Scalable System Design Approaches -- Lessons learned in the years after DARPA Subterranean Challenge
Apr 27, 2024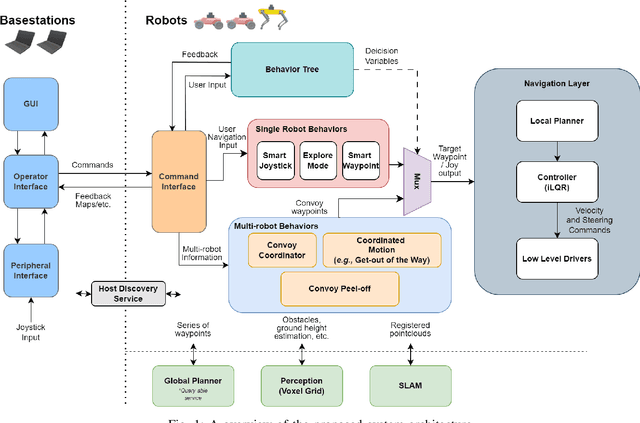
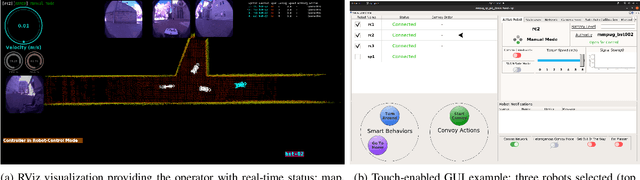
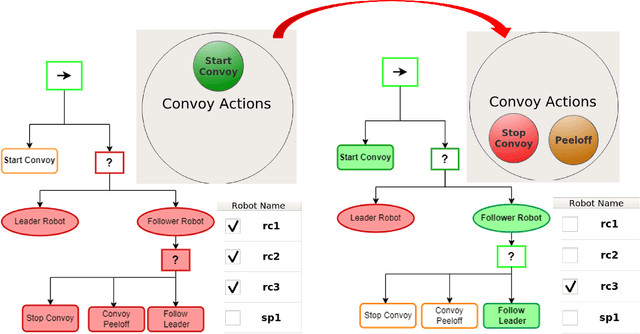
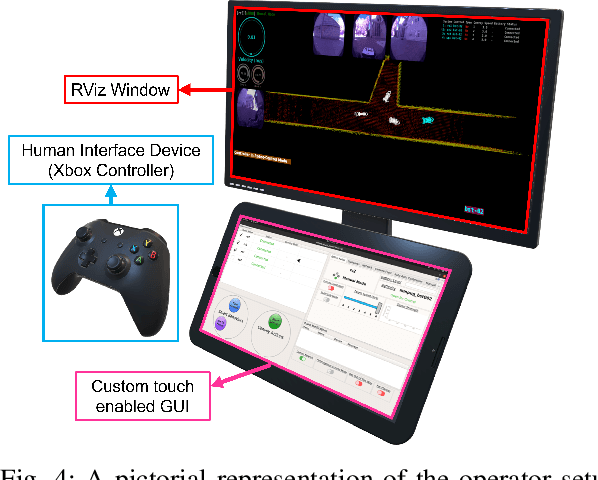
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team's participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy ("sliding mode autonomy"). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
High Speed Convoy in Unstructured Indoor Environments
Nov 11, 2022Practical operations of coordinated fleets of mobile robots in different environments reveal benefits of maintaining small distances between robots as they move at higher speeds. This is counter-intuitive in that as speed increases, increased distances would give robots a larger time to respond to sudden motion variations in surrounding robots. However, there is a desire to have lower inter-robot distances in examples like autonomous trucks on highways to optimize energy by vehicle drafting or smaller robots in cluttered environments to maintain communication, etc. This work introduces a model based control framework that directly takes non-linear system dynamics into account. Each robot is able to follow closer at high speeds because it makes predictions on the state information from its adjacent robots and biases it's response by anticipating adjacent robots' motion. In contrast to existing controllers, our non-linear model based predictive decentralized controller is able to achieve lower inter-robot distances at higher speeds. We demonstrate the success of our approach through simulated and hardware results on mobile ground robots.
Safe Adaptation Using Energy Functions
Dec 19, 2019
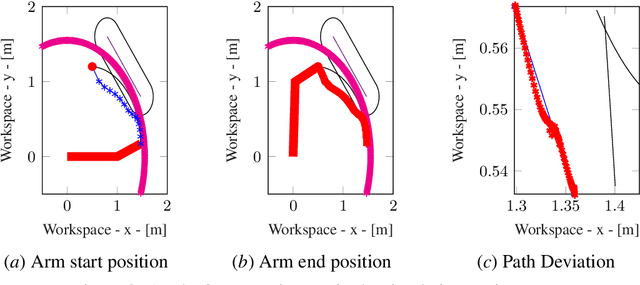
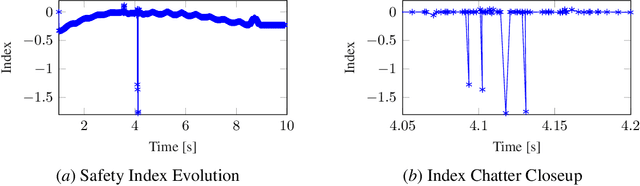
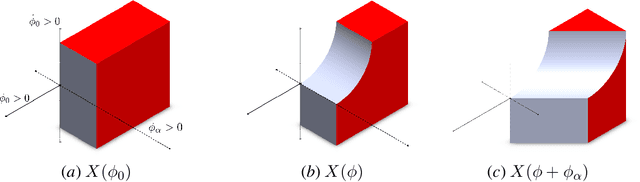
Adaptation has long been considered to be an important capability for autonomous systems. As these systems modify their behavior, questions regarding how to develop safety guarantees for such systems continue to be of interest. We propose a novel adaptive safe control methodology that allows a robotic system to adapt in a constrained environment without unintentionally colliding with that environment. A methodology for designing a scalar energy function (safety index) for an adaptive system with parametric uncertainty is described in this paper, and we demonstrate our methodology by realizing a safety controller for a simulated two-link robotic manipulator.