Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Adaptation Using Energy Functions
Paper and Code

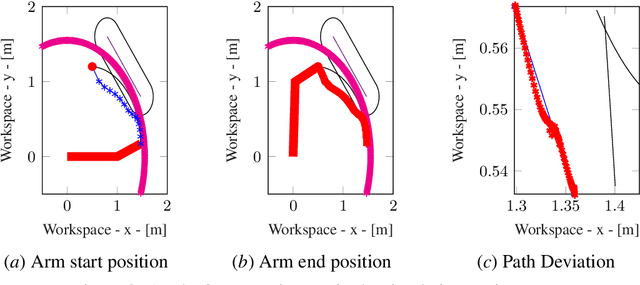
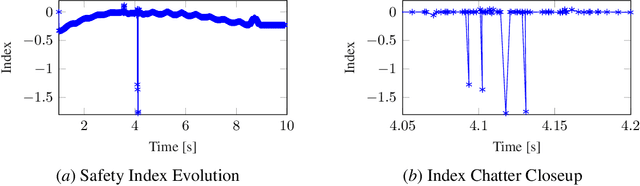
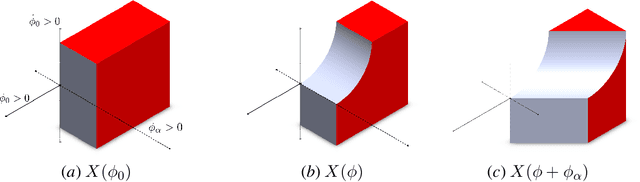
Adaptation has long been considered to be an important capability for autonomous systems. As these systems modify their behavior, questions regarding how to develop safety guarantees for such systems continue to be of interest. We propose a novel adaptive safe control methodology that allows a robotic system to adapt in a constrained environment without unintentionally colliding with that environment. A methodology for designing a scalar energy function (safety index) for an adaptive system with parametric uncertainty is described in this paper, and we demonstrate our methodology by realizing a safety controller for a simulated two-link robotic manipulator.
View paper on