 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGB-X Classification for Electronics Sorting
Sep 08, 2022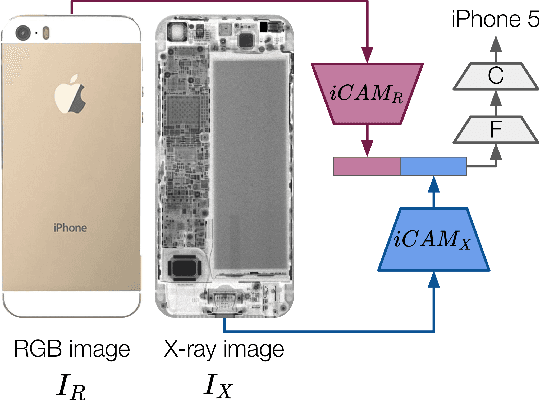


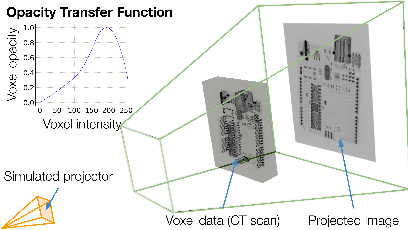
Effectively disassembling and recovering materials from waste electrical and electronic equipment (WEEE) is a critical step in moving global supply chains from carbon-intensive, mined materials to recycled and renewable ones. Conventional recycling processes rely on shredding and sorting waste streams, but for WEEE, which is comprised of numerous dissimilar materials, we explore targeted disassembly of numerous objects for improved material recovery. Many WEEE objects share many key features and therefore can look quite similar, but their material composition and internal component layout can vary, and thus it is critical to have an accurate classifier for subsequent disassembly steps for accurate material separation and recovery. This work introduces RGB-X, a multi-modal image classification approach, that utilizes key features from external RGB images with those generated from X-ray images to accurately classify electronic objects. More specifically, this work develops Iterative Class Activation Mapping (iCAM), a novel network architecture that explicitly focuses on the finer-details in the multi-modal feature maps that are needed for accurate electronic object classification. In order to train a classifier, electronic objects lack large and well annotated X-ray datasets due to expense and need of expert guidance. To overcome this issue, we present a novel way of creating a synthetic dataset using domain randomization applied to the X-ray domain. The combined RGB-X approach gives us an accuracy of 98.6% on 10 generations of modern smartphones, which is greater than their individual accuracies of 89.1% (RGB) and 97.9% (X-ray) independently. We provide experimental results3 to corroborate our results.
Correspondence Matrices are Underrated
Oct 30, 2020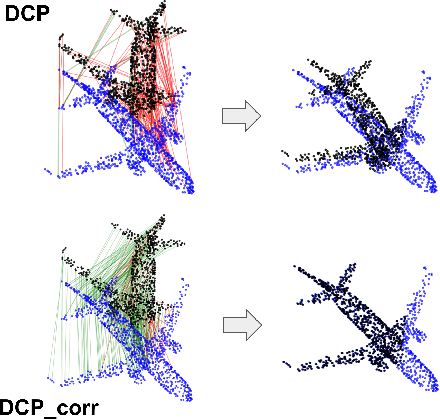



Point-cloud registration (PCR) is an important task in various applications such as robotic manipulation, augmented and virtual reality, SLAM, etc. PCR is an optimization problem involving minimization over two different types of interdependent variables: transformation parameters and point-to-point correspondences. Recent developments in deep-learning have produced computationally fast approaches for PCR. The loss functions that are optimized in these networks are based on the error in the transformation parameters. We hypothesize that these methods would perform significantly better if they calculated their loss function using correspondence error instead of only using error in transformation parameters. We define correspondence error as a metric based on incorrectly matched point pairs. We provide a fundamental explanation for why this is the case and test our hypothesis by modifying existing methods to use correspondence-based loss instead of transformation-based loss. These experiments show that the modified networks converge faster and register more accurately even at larger misalignment when compared to the original networks.
Globally optimal registration of noisy point clouds
Aug 22, 2019
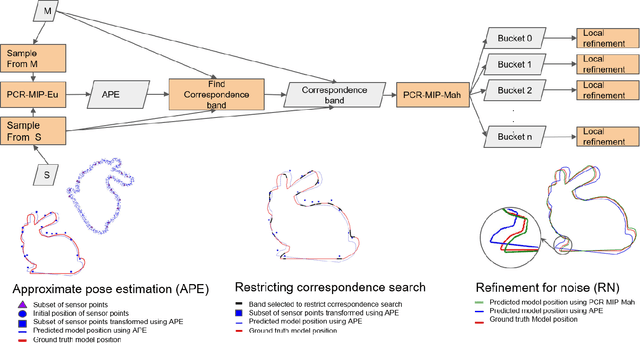
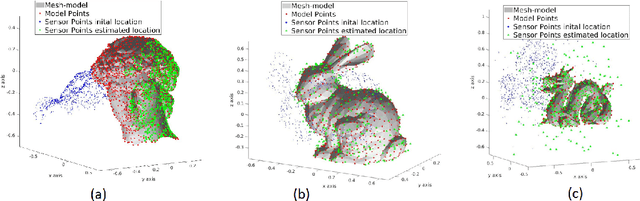
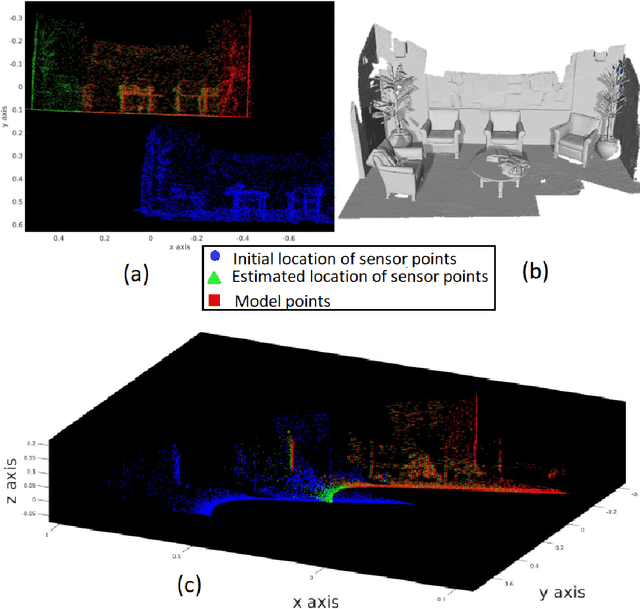
Registration of 3D point clouds is a fundamental task in several applications of robotics and computer vision. While registration methods such as iterative closest point and variants are very popular, they are only locally optimal. There has been some recent work on globally optimal registration, but they perform poorly in the presence of noise in the measurements. In this work we develop a mixed integer programming-based approach for globally optimal registration that explicitly considers uncertainty in its optimization, and hence produces more accurate estimates. Furthermore, from a practical implementation perspective we develop a multi-step optimization that combines fast local methods with our accurate global formulation. Through extensive simulation and real world experiments we demonstrate improved performance over state-of-the-art methods for various level of noise and outliers in the data as well as for partial geometric overlap.