 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Metric Aware Trajectory Repairing for Automated Driving
Aug 20, 2024



Recent analyses highlight challenges in autonomous vehicle technologies, particularly failures in decision-making under dynamic or emergency conditions. Traditional automated driving systems recalculate the entire trajectory in a changing environment. Instead, a novel approach retains valid trajectory segments, minimizing the need for complete replanning and reducing changes to the original plan. This work introduces a trajectory repairing framework that calculates a feasible evasive trajectory while computing the Feasible Time-to-React (F-TTR), balancing the maintenance of the original plan with safety assurance. The framework employs a binary search algorithm to iteratively create repaired trajectories, guaranteeing both the safety and feasibility of the trajectory repairing result. In contrast to earlier approaches that separated the calculation of safety metrics from trajectory repairing, which resulted in unsuccessful plans for evasive maneuvers, our work has the anytime capability to provide both a Feasible Time-to-React and an evasive trajectory for further execution.
Search-Based Task and Motion Planning for Hybrid Systems: Agile Autonomous Vehicles
Jan 25, 2023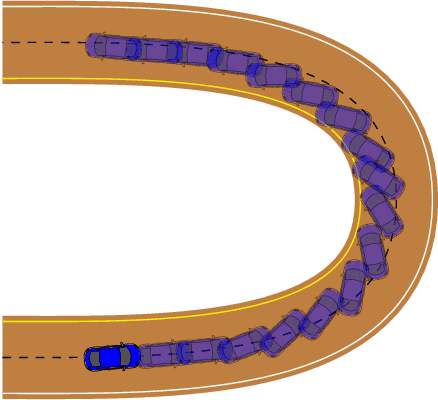
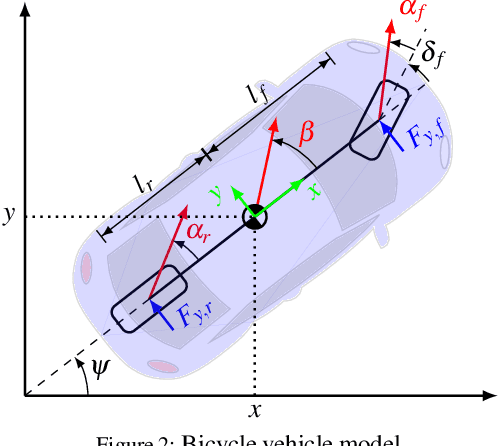
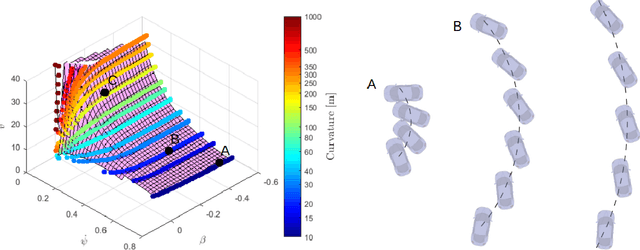
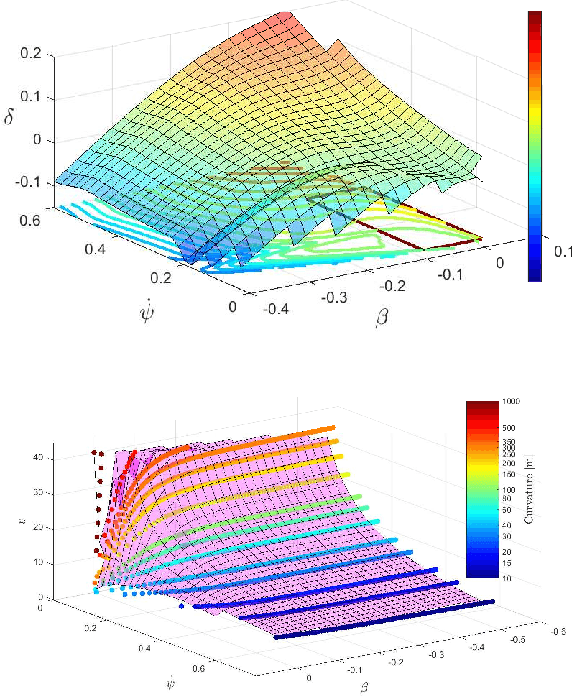
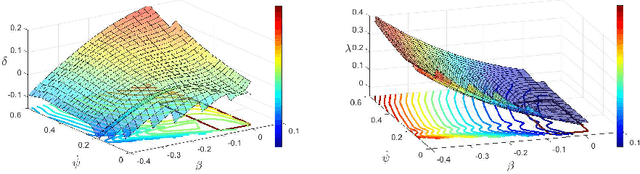
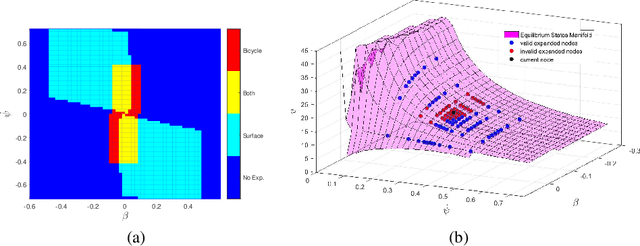
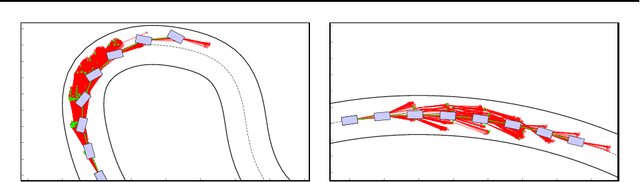
To achieve optimal robot behavior in dynamic scenarios we need to consider complex dynamics in a predictive manner. In the vehicle dynamics community, it is well know that to achieve time-optimal driving on low surface, the vehicle should utilize drifting. Hence many authors have devised rules to split circuits and employ drifting on some segments. These rules are suboptimal and do not generalize to arbitrary circuit shapes (e.g., S-like curves). So, the question "When to go into which mode and how to drive in it?" remains unanswered. To choose the suitable mode (discrete decision), the algorithm needs information about the feasibility of the continuous motion in that mode. This makes it a class of Task and Motion Planning (TAMP) problems, which are known to be hard to solve optimally in real-time. In the AI planning community, search methods are commonly used. However, they cannot be directly applied to TAMP problems due to the continuous component. Here, we present a search-based method that effectively solves this problem and efficiently searches in a highly dimensional state space with nonlinear and unstable dynamics. The space of the possible trajectories is explored by sampling different combinations of motion primitives guided by the search. Our approach allows to use multiple locally approximated models to generate motion primitives (e.g., learned models of drifting) and effectively simplify the problem without losing accuracy. The algorithm performance is evaluated in simulated driving on a mixed-track with segments of different curvatures (right and left). Our code is available at https://git.io/JenvB
Search-Based Motion Planning for Performance Autonomous Driving
Jul 18, 2019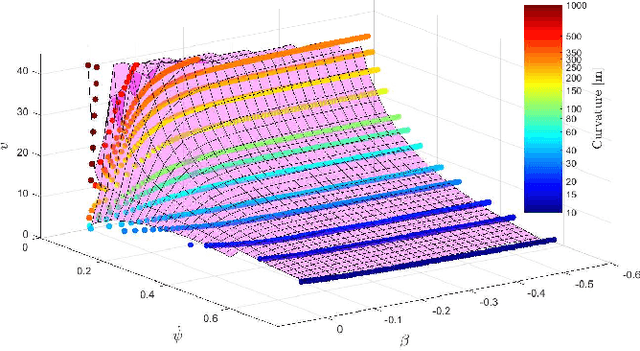
Driving on the limits of vehicle dynamics requires predictive planning of future vehicle states. In this work, a search-based motion planning is used to generate suitable reference trajectories of dynamic vehicle states with the goal to achieve the minimum lap time on slippery roads. The search-based approach enables to explicitly consider a nonlinear vehicle dynamics model as well as constraints on states and inputs so that even challenging scenarios can be achieved in a safe and optimal way. The algorithm performance is evaluated in simulated driving on a track with segments of different curvatures.
Learning a Behavior Model of Hybrid Systems Through Combining Model-Based Testing and Machine Learning
Jul 10, 2019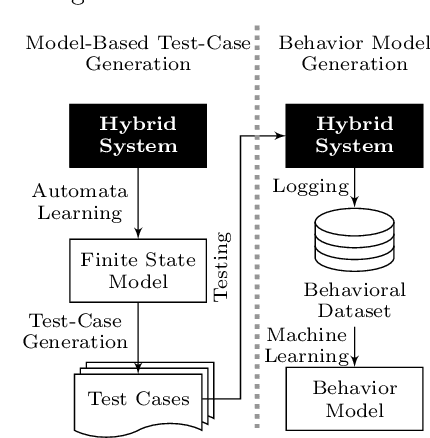
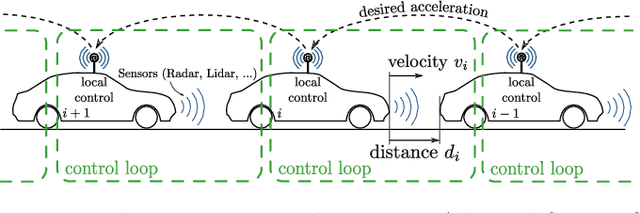
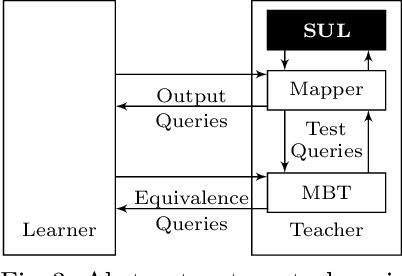
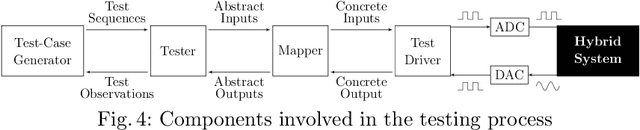
Models play an essential role in the design process of cyber-physical systems. They form the basis for simulation and analysis and help in identifying design problems as early as possible. However, the construction of models that comprise physical and digital behavior is challenging. Therefore, there is considerable interest in learning such hybrid behavior by means of machine learning which requires sufficient and representative training data covering the behavior of the physical system adequately. In this work, we exploit a combination of automata learning and model-based testing to generate sufficient training data fully automatically. Experimental results on a platooning scenario show that recurrent neural networks learned with this data achieved significantly better results compared to models learned from randomly generated data. In particular, the classification error for crash detection is reduced by a factor of five and a similar F1-score is obtained with up to three orders of magnitude fewer training samples.
Search-based optimal motion planning for automated driving
Aug 03, 2018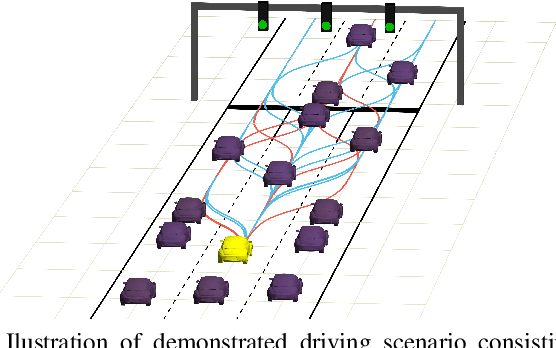

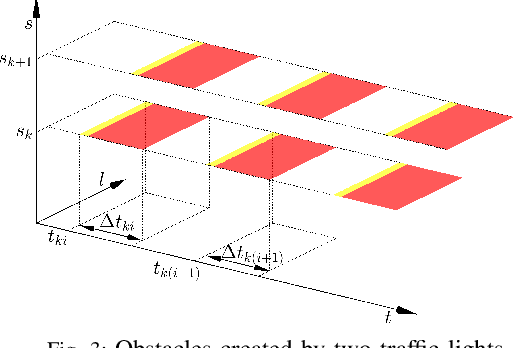
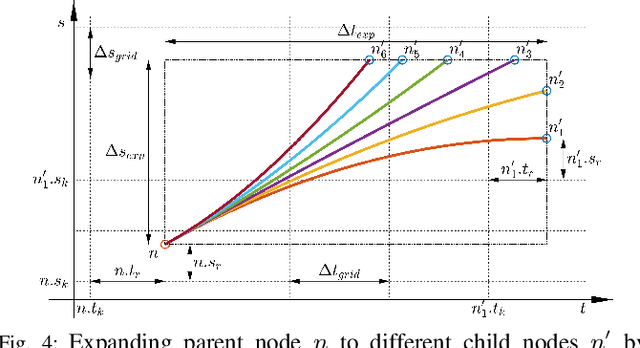
This paper presents a framework for fast and robust motion planning designed to facilitate automated driving. The framework allows for real-time computation even for horizons of several hundred meters and thus enabling automated driving in urban conditions. This is achieved through several features. Firstly, a convenient geometrical representation of both the search space and driving constraints enables the use of classical path planning approach. Thus, a wide variety of constraints can be tackled simultaneously (other vehicles, traffic lights, etc.). Secondly, an exact cost-to-go map, obtained by solving a relaxed problem, is then used by A*-based algorithm with model predictive flavour in order to compute the optimal motion trajectory. The algorithm takes into account both distance and time horizons. The approach is validated within a simulation study with realistic traffic scenarios. We demonstrate the capability of the algorithm to devise plans both in fast and slow driving conditions, even when full stop is required.
Safe learning-based optimal motion planning for automated driving
Jun 13, 2018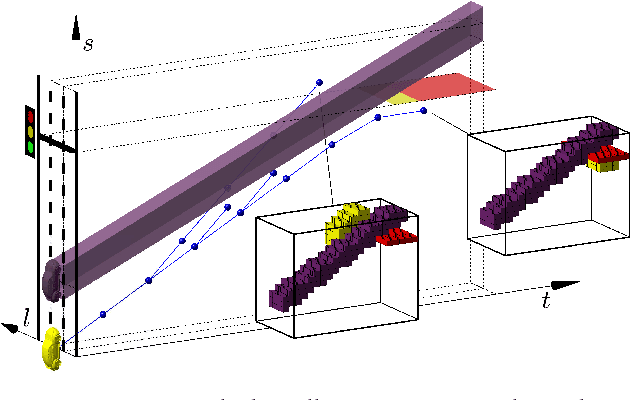
This paper presents preliminary work on learning the search heuristic for the optimal motion planning for automated driving in urban traffic. Previous work considered search-based optimal motion planning framework (SBOMP) that utilized numerical or model-based heuristics that did not consider dynamic obstacles. Optimal solution was still guaranteed since dynamic obstacles can only increase the cost. However, significant variations in the search efficiency are observed depending whether dynamic obstacles are present or not. This paper introduces machine learning (ML) based heuristic that takes into account dynamic obstacles, thus adding to the performance consistency for achieving real-time implementation.
A novel model-based heuristic for energy optimal motion planning for automated driving
Mar 08, 2018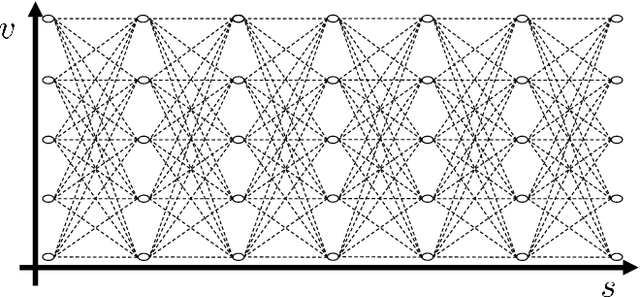
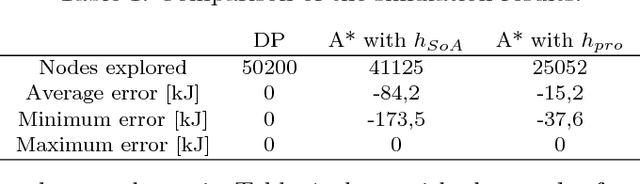
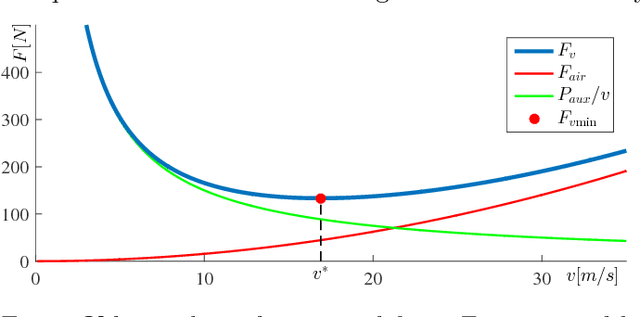
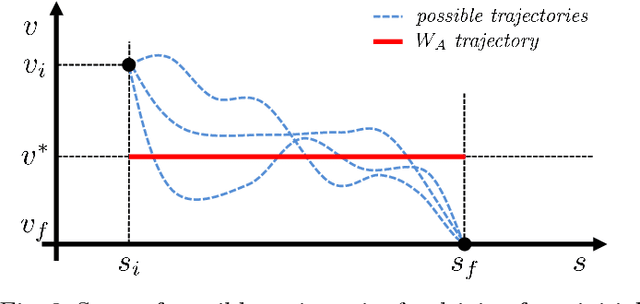
Predictive motion planning is the key to achieve energy-efficient driving, which is one of the main benefits of automated driving. Researchers have been studying the planning of velocity trajectories, a simpler form of motion planning, for over a decade now and many different methods are available. Dynamic programming has shown to be the most common choice due to its numerical background and ability to include nonlinear constraints and models. Although planning of an optimal trajectory is done in a systematic way, dynamic programming does not use any knowledge about the considered problem to guide the exploration and therefore explores all possible trajectories. A* is a search algorithm which enables using knowledge about the problem to guide the exploration to the most promising solutions first. Knowledge has to be represented in a form of a heuristic function, which gives an optimistic estimate of cost for transitioning to the final state, which is not a straightforward task. This paper presents a novel heuristics incorporating air drag and auxiliary power as well as operational costs of the vehicle, besides kinetic and potential energy and rolling resistance known in the literature. Furthermore, optimal cruising velocity, which depends on vehicle aerodynamic properties and auxiliary power, is derived. Results are compared for different variants of heuristic functions and dynamic programming as well.