 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-based optimal motion planning for automated driving
Paper and Code
Aug 03, 2018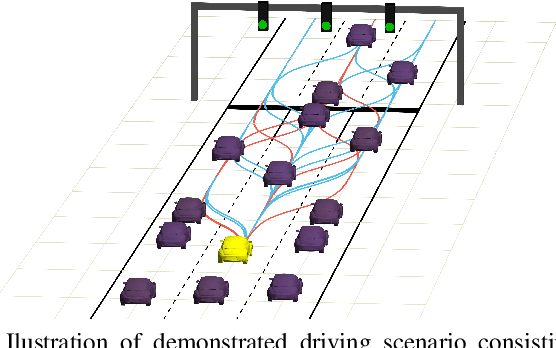

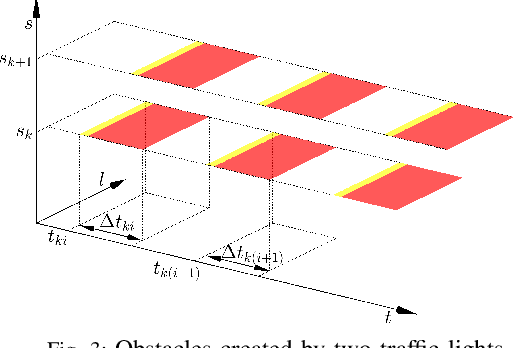
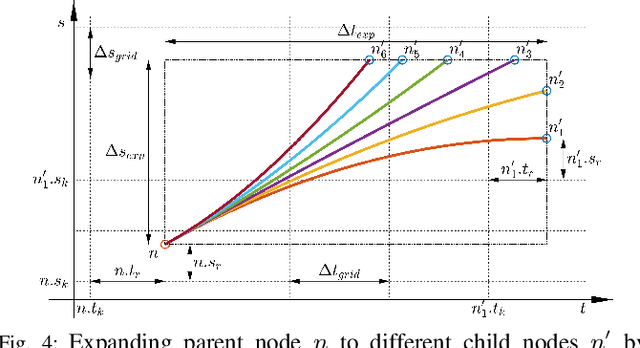
This paper presents a framework for fast and robust motion planning designed to facilitate automated driving. The framework allows for real-time computation even for horizons of several hundred meters and thus enabling automated driving in urban conditions. This is achieved through several features. Firstly, a convenient geometrical representation of both the search space and driving constraints enables the use of classical path planning approach. Thus, a wide variety of constraints can be tackled simultaneously (other vehicles, traffic lights, etc.). Secondly, an exact cost-to-go map, obtained by solving a relaxed problem, is then used by A*-based algorithm with model predictive flavour in order to compute the optimal motion trajectory. The algorithm takes into account both distance and time horizons. The approach is validated within a simulation study with realistic traffic scenarios. We demonstrate the capability of the algorithm to devise plans both in fast and slow driving conditions, even when full stop is required.