 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Weight Particle Filter for Radar-Based Dynamic Bayesian Grid Maps
Mar 20, 2023



Through constant improvements in recent years radar sensors have become a viable alternative to lidar as the main distancing sensor of an autonomous vehicle. Although robust and with the possibility to directly measure the radial velocity, it brings it's own set of challenges, for which existing algorithms need to be adapted. One core algorithm of a perception system is dynamic occupancy grid mapping, which has traditionally relied on lidar. In this paper we present a dual-weight particle filter as an extension for a Bayesian occupancy grid mapping framework to allow to operate it with radar as its main sensors. It uses two separate particle weights that are computed differently to compensate that a radial velocity measurement in many situations is not able to capture the actual velocity of an object. We evaluate the method extensively with simulated data and show the advantages over existing single weight solutions.
Search-based optimal motion planning for automated driving
Aug 03, 2018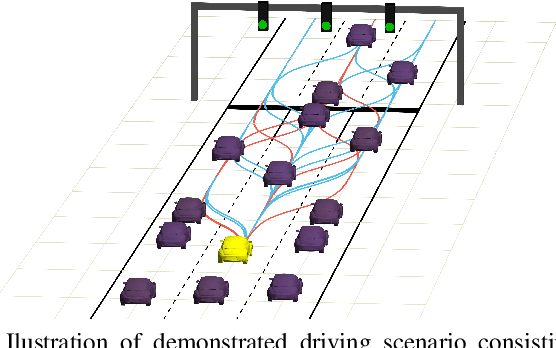

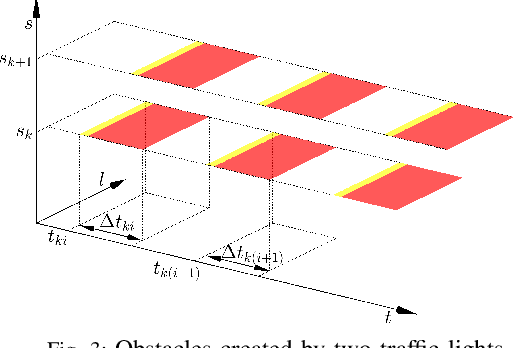
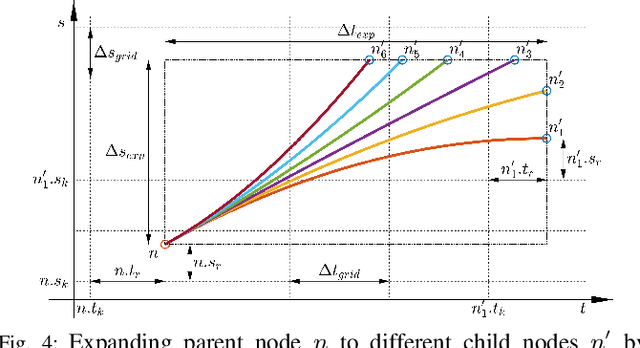
This paper presents a framework for fast and robust motion planning designed to facilitate automated driving. The framework allows for real-time computation even for horizons of several hundred meters and thus enabling automated driving in urban conditions. This is achieved through several features. Firstly, a convenient geometrical representation of both the search space and driving constraints enables the use of classical path planning approach. Thus, a wide variety of constraints can be tackled simultaneously (other vehicles, traffic lights, etc.). Secondly, an exact cost-to-go map, obtained by solving a relaxed problem, is then used by A*-based algorithm with model predictive flavour in order to compute the optimal motion trajectory. The algorithm takes into account both distance and time horizons. The approach is validated within a simulation study with realistic traffic scenarios. We demonstrate the capability of the algorithm to devise plans both in fast and slow driving conditions, even when full stop is required.
A novel model-based heuristic for energy optimal motion planning for automated driving
Mar 08, 2018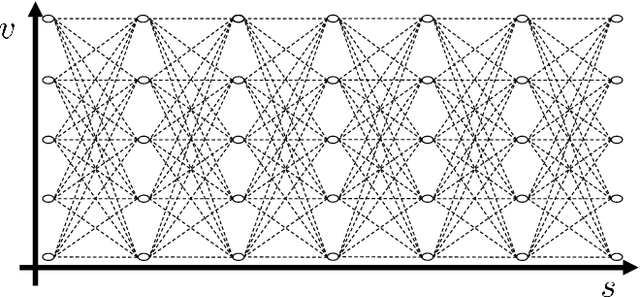
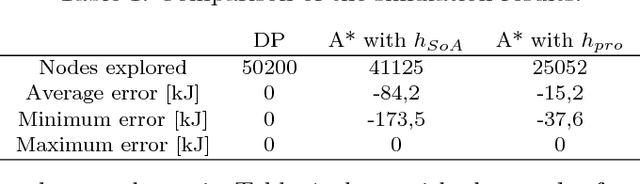
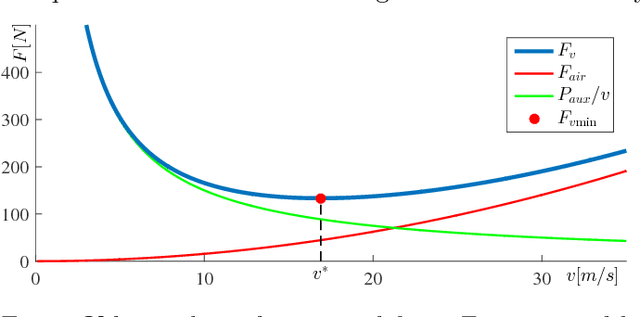
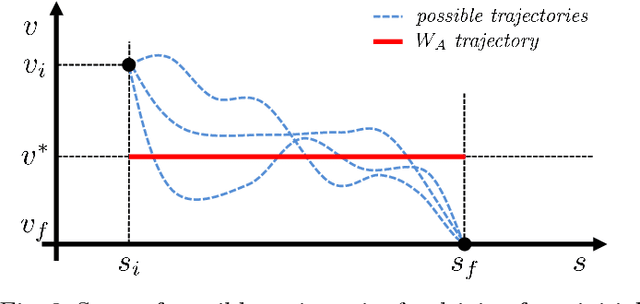
Predictive motion planning is the key to achieve energy-efficient driving, which is one of the main benefits of automated driving. Researchers have been studying the planning of velocity trajectories, a simpler form of motion planning, for over a decade now and many different methods are available. Dynamic programming has shown to be the most common choice due to its numerical background and ability to include nonlinear constraints and models. Although planning of an optimal trajectory is done in a systematic way, dynamic programming does not use any knowledge about the considered problem to guide the exploration and therefore explores all possible trajectories. A* is a search algorithm which enables using knowledge about the problem to guide the exploration to the most promising solutions first. Knowledge has to be represented in a form of a heuristic function, which gives an optimistic estimate of cost for transitioning to the final state, which is not a straightforward task. This paper presents a novel heuristics incorporating air drag and auxiliary power as well as operational costs of the vehicle, besides kinetic and potential energy and rolling resistance known in the literature. Furthermore, optimal cruising velocity, which depends on vehicle aerodynamic properties and auxiliary power, is derived. Results are compared for different variants of heuristic functions and dynamic programming as well.