 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel model-based heuristic for energy optimal motion planning for automated driving
Paper and Code
Mar 08, 2018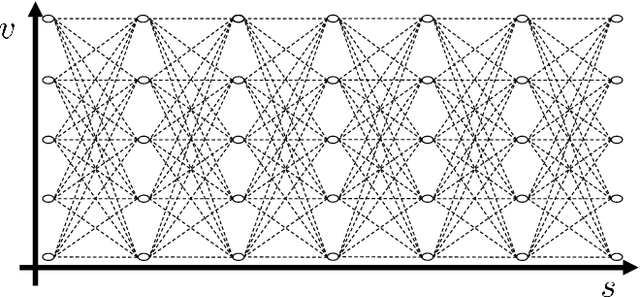
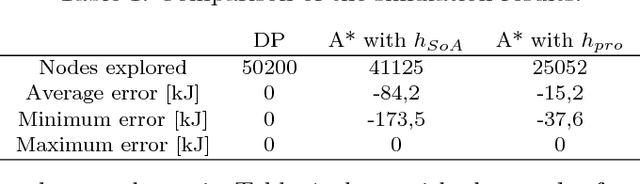
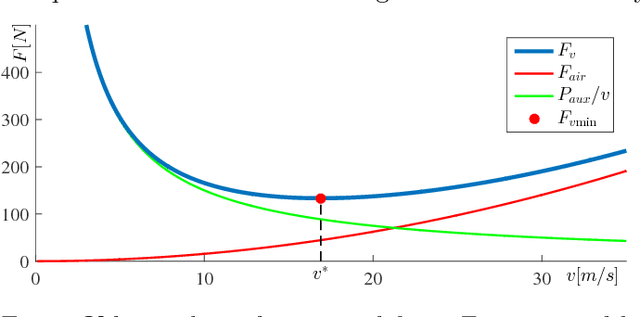
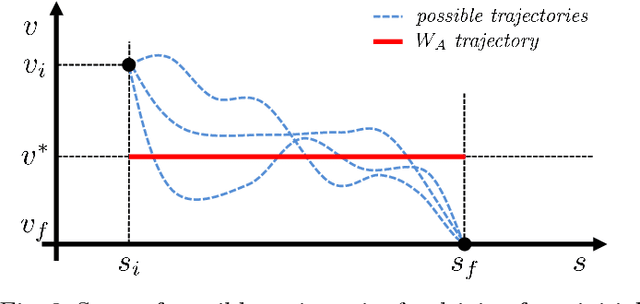
Predictive motion planning is the key to achieve energy-efficient driving, which is one of the main benefits of automated driving. Researchers have been studying the planning of velocity trajectories, a simpler form of motion planning, for over a decade now and many different methods are available. Dynamic programming has shown to be the most common choice due to its numerical background and ability to include nonlinear constraints and models. Although planning of an optimal trajectory is done in a systematic way, dynamic programming does not use any knowledge about the considered problem to guide the exploration and therefore explores all possible trajectories. A* is a search algorithm which enables using knowledge about the problem to guide the exploration to the most promising solutions first. Knowledge has to be represented in a form of a heuristic function, which gives an optimistic estimate of cost for transitioning to the final state, which is not a straightforward task. This paper presents a novel heuristics incorporating air drag and auxiliary power as well as operational costs of the vehicle, besides kinetic and potential energy and rolling resistance known in the literature. Furthermore, optimal cruising velocity, which depends on vehicle aerodynamic properties and auxiliary power, is derived. Results are compared for different variants of heuristic functions and dynamic programming as well.