Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe learning-based optimal motion planning for automated driving
Paper and Code
Jun 13, 2018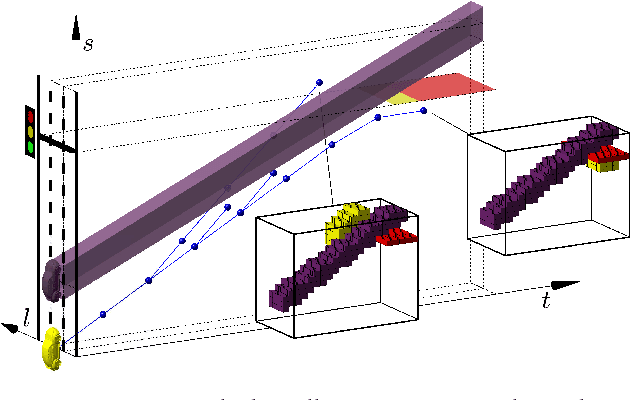
This paper presents preliminary work on learning the search heuristic for the optimal motion planning for automated driving in urban traffic. Previous work considered search-based optimal motion planning framework (SBOMP) that utilized numerical or model-based heuristics that did not consider dynamic obstacles. Optimal solution was still guaranteed since dynamic obstacles can only increase the cost. However, significant variations in the search efficiency are observed depending whether dynamic obstacles are present or not. This paper introduces machine learning (ML) based heuristic that takes into account dynamic obstacles, thus adding to the performance consistency for achieving real-time implementation.
* 3 pages, 1 figure, 1 pseudocode, extended abstract accepted to ICML /
IJCAI / AAMAS 2018 Workshop on Planning and Learning (PAL-18)
View paper on