 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch Inspired Exploration in Reinforcement Learning
Jan 31, 2026Exploration in environments with sparse rewards remains a fundamental challenge in reinforcement learning (RL). Existing approaches such as curriculum learning and Go-Explore often rely on hand-crafted heuristics, while curiosity-driven methods risk converging to suboptimal policies. We propose Search-Inspired Exploration in Reinforcement Learning (SIERL), a novel method that actively guides exploration by setting sub-goals based on the agent's learning progress. At the beginning of each episode, SIERL chooses a sub-goal from the \textit{frontier} (the boundary of the agent's known state space), before the agent continues exploring toward the main task objective. The key contribution of our method is the sub-goal selection mechanism, which provides state-action pairs that are neither overly familiar nor completely novel. Thus, it assures that the frontier is expanded systematically and that the agent is capable of reaching any state within it. Inspired by search, sub-goals are prioritized from the frontier based on estimates of cost-to-come and cost-to-go, effectively steering exploration towards the most informative regions. In experiments on challenging sparse-reward environments, SIERL outperforms dominant baselines in both achieving the main task goal and generalizing to reach arbitrary states in the environment.
ASkDAgger: Active Skill-level Data Aggregation for Interactive Imitation Learning
Aug 07, 2025Human teaching effort is a significant bottleneck for the broader applicability of interactive imitation learning. To reduce the number of required queries, existing methods employ active learning to query the human teacher only in uncertain, risky, or novel situations. However, during these queries, the novice's planned actions are not utilized despite containing valuable information, such as the novice's capabilities, as well as corresponding uncertainty levels. To this end, we allow the novice to say: "I plan to do this, but I am uncertain." We introduce the Active Skill-level Data Aggregation (ASkDAgger) framework, which leverages teacher feedback on the novice plan in three key ways: (1) S-Aware Gating (SAG): Adjusts the gating threshold to track sensitivity, specificity, or a minimum success rate; (2) Foresight Interactive Experience Replay (FIER), which recasts valid and relabeled novice action plans into demonstrations; and (3) Prioritized Interactive Experience Replay (PIER), which prioritizes replay based on uncertainty, novice success, and demonstration age. Together, these components balance query frequency with failure incidence, reduce the number of required demonstration annotations, improve generalization, and speed up adaptation to changing domains. We validate the effectiveness of ASkDAgger through language-conditioned manipulation tasks in both simulation and real-world environments. Code, data, and videos are available at https://askdagger.github.io.
A Multi-Heuristic Search-based Motion Planning for Automated Parking
Jul 15, 2023


In unstructured environments like parking lots or construction sites, due to the large search-space and kinodynamic constraints of the vehicle, it is challenging to achieve real-time planning. Several state-of-the-art planners utilize heuristic search-based algorithms. However, they heavily rely on the quality of the single heuristic function, used to guide the search. Therefore, they are not capable to achieve reasonable computational performance, resulting in unnecessary delays in the response of the vehicle. In this work, we are adopting a Multi-Heuristic Search approach, that enables the use of multiple heuristic functions and their individual advantages to capture different complexities of a given search space. Based on our knowledge, this approach was not used previously for this problem. For this purpose, multiple admissible and non-admissible heuristic functions are defined, the original Multi-Heuristic A* Search was extended for bidirectional use and dealing with hybrid continuous-discrete search space, and a mechanism for adapting scale of motion primitives is introduced. To demonstrate the advantage, the Multi-Heuristic A* algorithm is benchmarked against a very popular heuristic search-based algorithm, Hybrid A*. The Multi-Heuristic A* algorithm outperformed baseline in both terms, computation efficiency and motion plan (path) quality.
Robotic Packaging Optimization with Reinforcement Learning
Mar 26, 2023



Intelligent manufacturing is becoming increasingly important due to the growing demand for maximizing productivity and flexibility while minimizing waste and lead times. This work investigates automated secondary robotic food packaging solutions that transfer food products from the conveyor belt into containers. A major problem in these solutions is varying product supply which can cause drastic productivity drops. Conventional rule-based approaches, used to address this issue, are often inadequate, leading to violation of the industry's requirements. Reinforcement learning, on the other hand, has the potential of solving this problem by learning responsive and predictive policy, based on experience. However, it is challenging to utilize it in highly complex control schemes. In this paper, we propose a reinforcement learning framework, designed to optimize the conveyor belt speed while minimizing interference with the rest of the control system. When tested on real-world data, the framework exceeds the performance requirements (99.8% packed products) and maintains quality (100% filled boxes). Compared to the existing solution, our proposed framework improves productivity, has smoother control, and reduces computation time.
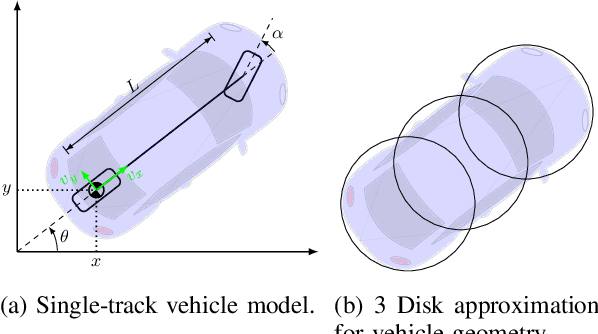
Search-Based Task and Motion Planning for Hybrid Systems: Agile Autonomous Vehicles
Jan 25, 2023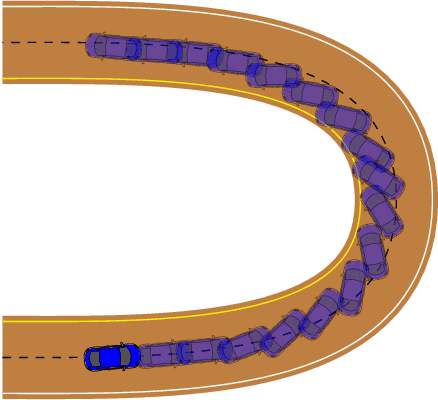
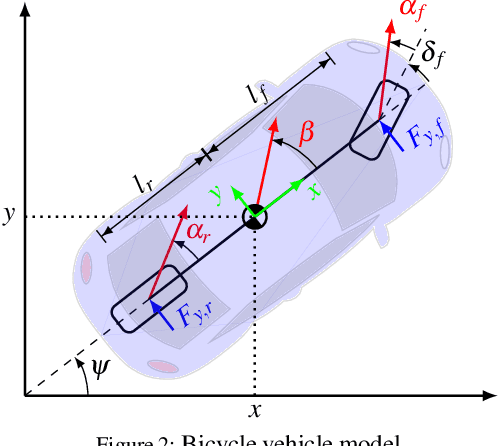
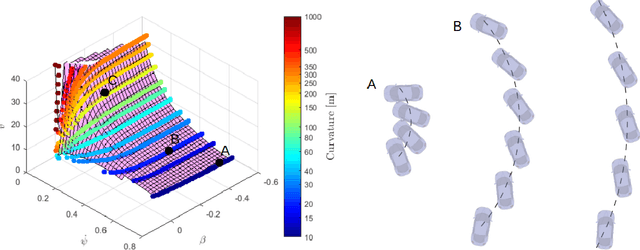
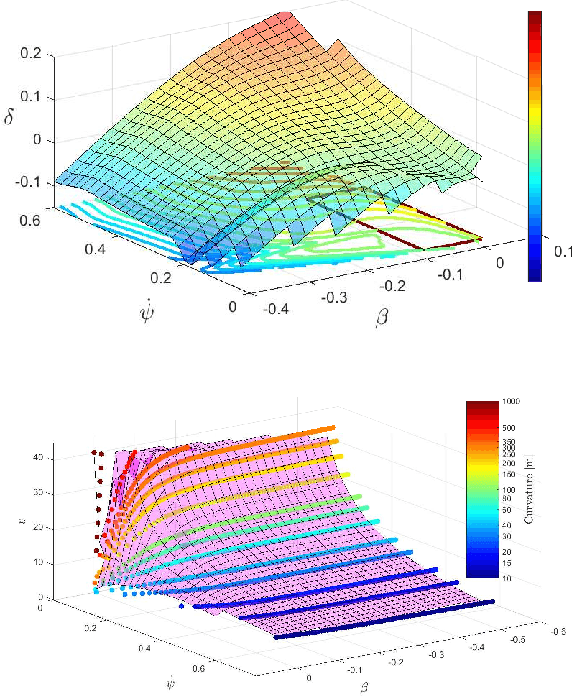
To achieve optimal robot behavior in dynamic scenarios we need to consider complex dynamics in a predictive manner. In the vehicle dynamics community, it is well know that to achieve time-optimal driving on low surface, the vehicle should utilize drifting. Hence many authors have devised rules to split circuits and employ drifting on some segments. These rules are suboptimal and do not generalize to arbitrary circuit shapes (e.g., S-like curves). So, the question "When to go into which mode and how to drive in it?" remains unanswered. To choose the suitable mode (discrete decision), the algorithm needs information about the feasibility of the continuous motion in that mode. This makes it a class of Task and Motion Planning (TAMP) problems, which are known to be hard to solve optimally in real-time. In the AI planning community, search methods are commonly used. However, they cannot be directly applied to TAMP problems due to the continuous component. Here, we present a search-based method that effectively solves this problem and efficiently searches in a highly dimensional state space with nonlinear and unstable dynamics. The space of the possible trajectories is explored by sampling different combinations of motion primitives guided by the search. Our approach allows to use multiple locally approximated models to generate motion primitives (e.g., learned models of drifting) and effectively simplify the problem without losing accuracy. The algorithm performance is evaluated in simulated driving on a mixed-track with segments of different curvatures (right and left). Our code is available at https://git.io/JenvB
Interactive Imitation Learning in Robotics: A Survey
Oct 31, 2022



Interactive Imitation Learning (IIL) is a branch of Imitation Learning (IL) where human feedback is provided intermittently during robot execution allowing an online improvement of the robot's behavior. In recent years, IIL has increasingly started to carve out its own space as a promising data-driven alternative for solving complex robotic tasks. The advantages of IIL are its data-efficient, as the human feedback guides the robot directly towards an improved behavior, and its robustness, as the distribution mismatch between the teacher and learner trajectories is minimized by providing feedback directly over the learner's trajectories. Nevertheless, despite the opportunities that IIL presents, its terminology, structure, and applicability are not clear nor unified in the literature, slowing down its development and, therefore, the research of innovative formulations and discoveries. In this article, we attempt to facilitate research in IIL and lower entry barriers for new practitioners by providing a survey of the field that unifies and structures it. In addition, we aim to raise awareness of its potential, what has been accomplished and what are still open research questions. We organize the most relevant works in IIL in terms of human-robot interaction (i.e., types of feedback), interfaces (i.e., means of providing feedback), learning (i.e., models learned from feedback and function approximators), user experience (i.e., human perception about the learning process), applications, and benchmarks. Furthermore, we analyze similarities and differences between IIL and RL, providing a discussion on how the concepts offline, online, off-policy and on-policy learning should be transferred to IIL from the RL literature. We particularly focus on robotic applications in the real world and discuss their implications, limitations, and promising future areas of research.
Vision for Bosnia and Herzegovina in Artificial Intelligence Age: Global Trends, Potential Opportunities, Selected Use-cases and Realistic Goals
Sep 08, 2022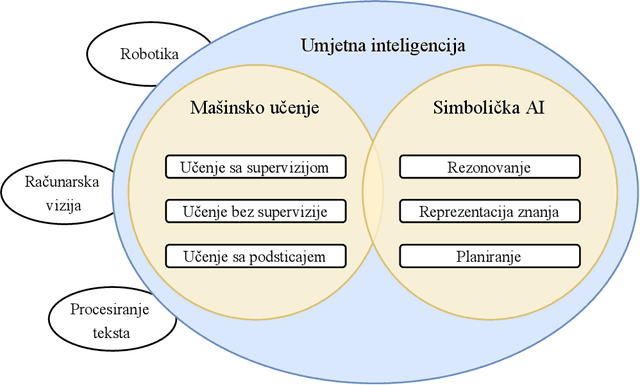
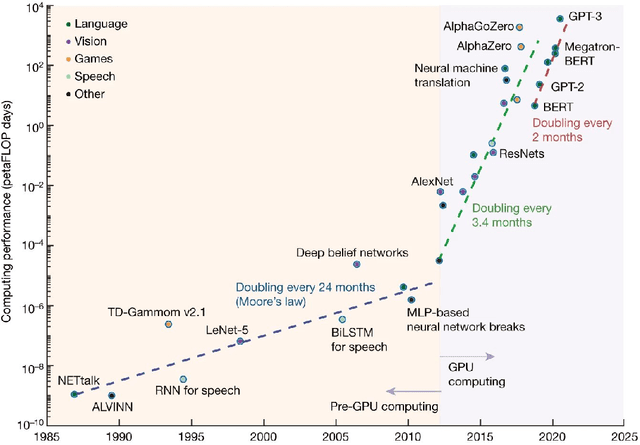
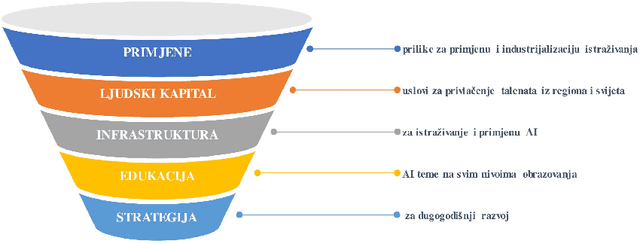
Artificial Intelligence (AI) is one of the most promising technologies of the 21. century, with an already noticeable impact on society and the economy. With this work, we provide a short overview of global trends, applications in industry and selected use-cases from our international experience and work in industry and academia. The goal is to present global and regional positive practices and provide an informed opinion on the realistic goals and opportunities for positioning B&H on the global AI scene.