Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-Based Motion Planning for Performance Autonomous Driving
Paper and Code
Jul 18, 2019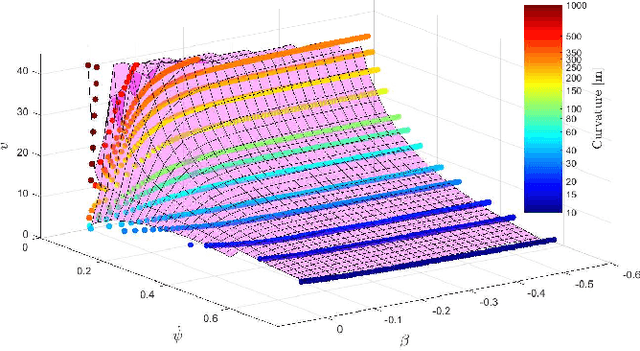
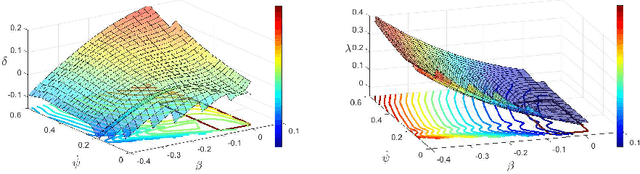
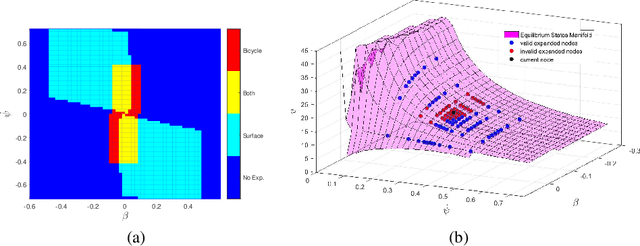
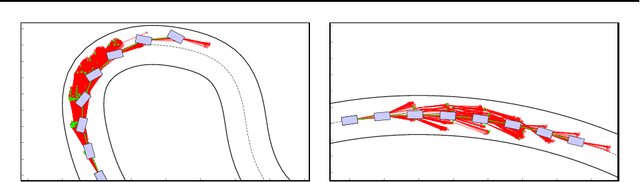
Driving on the limits of vehicle dynamics requires predictive planning of future vehicle states. In this work, a search-based motion planning is used to generate suitable reference trajectories of dynamic vehicle states with the goal to achieve the minimum lap time on slippery roads. The search-based approach enables to explicitly consider a nonlinear vehicle dynamics model as well as constraints on states and inputs so that even challenging scenarios can be achieved in a safe and optimal way. The algorithm performance is evaluated in simulated driving on a track with segments of different curvatures.
* Accepted to IAVSD 2019
View paper on