 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Ontology-based Approach Towards Traceable Behavior Specifications in Automated Driving
Sep 10, 2024Vehicles in public traffic that are equipped with Automated Driving Systems are subject to a number of expectations: Among other aspects, their behavior should be safe, conforming to the rules of the road and provide mobility to their users. This poses challenges for the developers of such systems: Developers are responsible for specifying this behavior, for example, in terms of requirements at system design time. As we will discuss in the article, this specification always involves the need for assumptions and trade-offs. As a result, insufficiencies in such a behavior specification can occur that can potentially lead to unsafe system behavior. In order to support the identification of specification insufficiencies, requirements and respective assumptions need to be made explicit. In this article, we propose the Semantic Norm Behavior Analysis as an ontology-based approach to specify the behavior for an Automated Driving System equipped vehicle. We use ontologies to formally represent specified behavior for a targeted operational environment, and to establish traceability between specified behavior and the addressed stakeholder needs. Furthermore, we illustrate the application of the Semantic Norm Behavior Analysis in two example scenarios and evaluate our results.
Towards Scenario- and Capability-Driven Dataset Development and Evaluation: An Approach in the Context of Mapless Automated Driving
Apr 30, 2024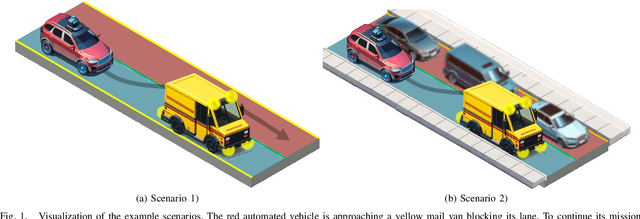


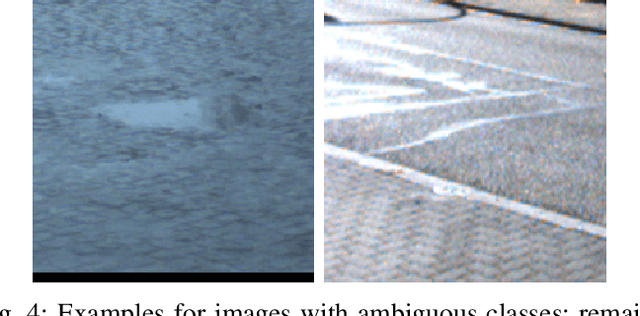
The foundational role of datasets in defining the capabilities of deep learning models has led to their rapid proliferation. At the same time, published research focusing on the process of dataset development for environment perception in automated driving has been scarce, thereby reducing the applicability of openly available datasets and impeding the development of effective environment perception systems. Sensor-based, mapless automated driving is one of the contexts where this limitation is evident. While leveraging real-time sensor data, instead of pre-defined HD maps promises enhanced adaptability and safety by effectively navigating unexpected environmental changes, it also increases the demands on the scope and complexity of the information provided by the perception system. To address these challenges, we propose a scenario- and capability-based approach to dataset development. Grounded in the principles of ISO 21448 (safety of the intended functionality, SOTIF), extended by ISO/TR 4804, our approach facilitates the structured derivation of dataset requirements. This not only aids in the development of meaningful new datasets but also enables the effective comparison of existing ones. Applying this methodology to a broad range of existing lane detection datasets, we identify significant limitations in current datasets, particularly in terms of real-world applicability, a lack of labeling of critical features, and an absence of comprehensive information for complex driving maneuvers.
Conformal Prediction of Motion Control Performance for an Automated Vehicle in Presence of Actuator Degradations and Failures
Apr 25, 2024



Automated driving systems require monitoring mechanisms to ensure safe operation, especially if system components degrade or fail. Their runtime self-representation plays a key role as it provides a-priori knowledge about the system's capabilities and limitations. In this paper, we propose a data-driven approach for deriving such a self-representation model for the motion controller of an automated vehicle. A conformalized prediction model is learned and allows estimating how operational conditions as well as potential degradations and failures of the vehicle's actuators impact motion control performance. During runtime behavior generation, our predictor can provide a heuristic for determining the admissible action space.
Robust LSTM-based Vehicle Velocity Observer for Regular and Near-limits Applications
Mar 31, 2023
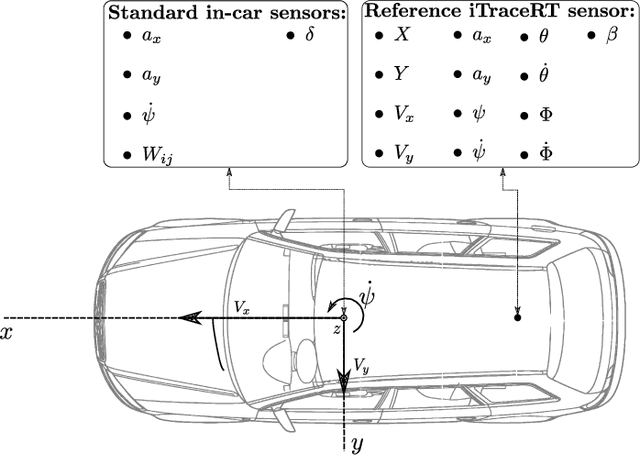
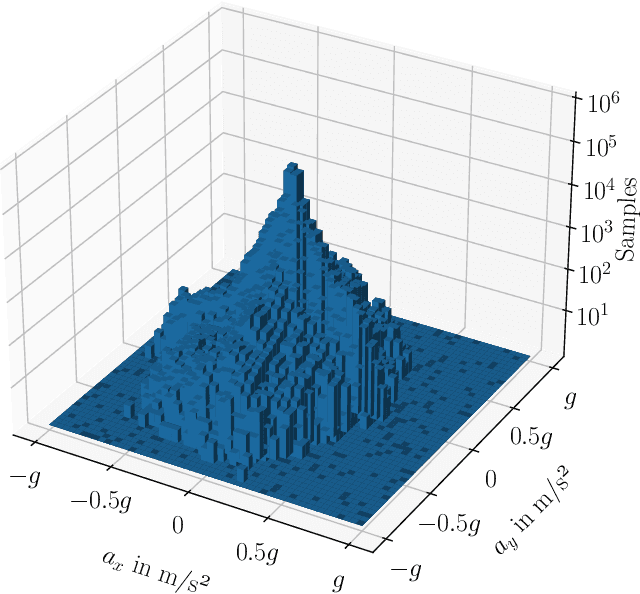
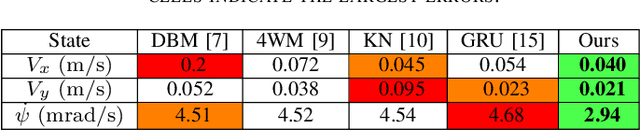
Accurate velocity estimation is key to vehicle control. While the literature describes how model-based and learning-based observers are able to estimate a vehicle's velocity in normal driving conditions, the challenge remains to estimate the velocity in near-limits maneuvers while using only conventional in-car sensors. In this paper, we introduce a novel neural network architecture based on Long Short-Term Memory (LSTM) networks to accurately estimate the vehicle's velocity in different driving conditions, including maneuvers at the limits of handling. The approach has been tested on real vehicle data and it provides more accurate estimations than state-of-the-art model-based and learning-based methods, for both regular and near-limits driving scenarios. Our approach is robust since the performance of the state-of-the-art observers deteriorates with higher dynamics, while our method adapts to different maneuvers, providing accurate estimations even at the vehicle's limits of handling.
A Knowledge-based Approach for the Automatic Construction of Skill Graphs for Online Monitoring
Feb 15, 2021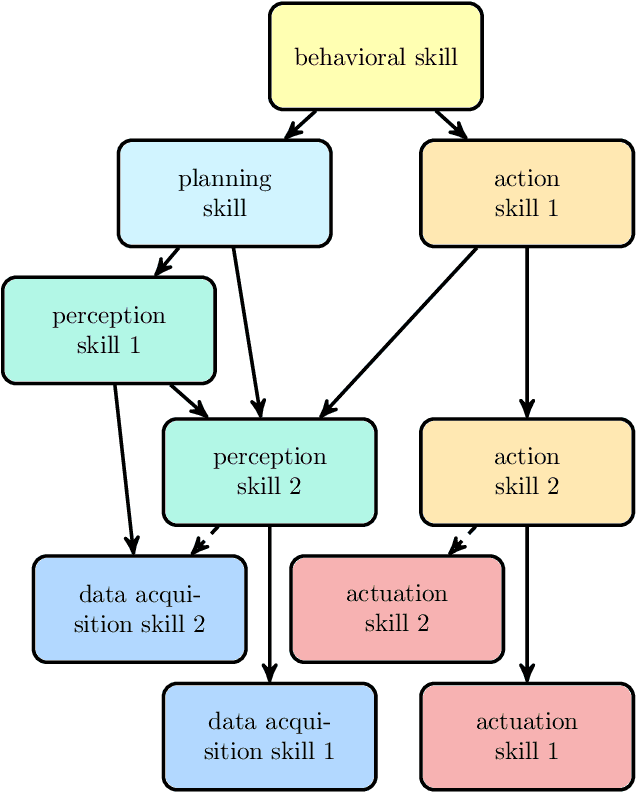
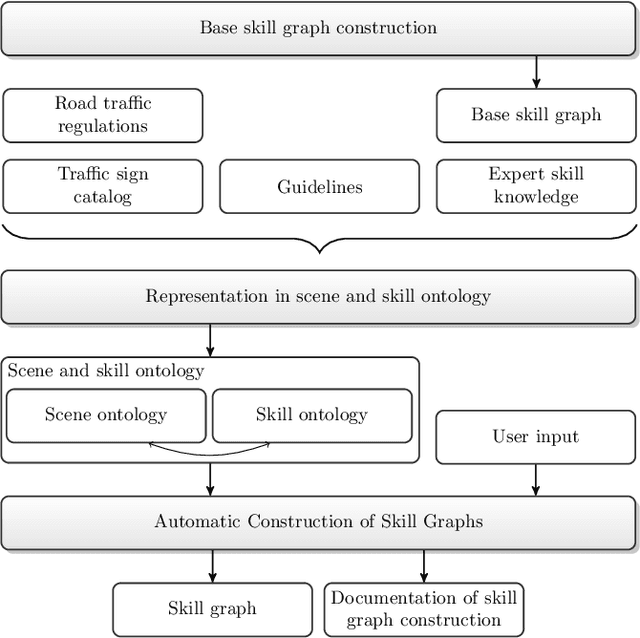
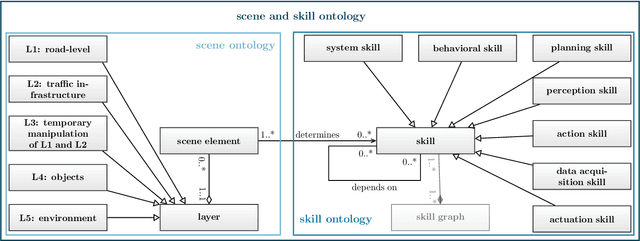

Automated vehicles need to be aware of the capabilities they currently possess. Skill graphs are directed acylic graphs in which a vehicle's capabilities and the dependencies between these capabilities are modeled. The skills a vehicle requires depend on the behaviors the vehicle has to perform and the operational design domain (ODD) of the vehicle. Skill graphs were originally proposed for online monitoring of the current capabilities of an automated vehicle. They have also been shown to be useful during other parts of the development process, e.g. system design, system verification. Skill graph construction is an iterative, expert-based, manual process with little to no guidelines. This process is, thus, prone to errors and inconsistencies especially regarding the propagation of changes in the vehicle's intended ODD into the skill graphs. In order to circumnavigate this problem, we propose to formalize expert knowledge regarding skill graph construction into a knowledge base and automate the construction process. Thus, all changes in the vehicle's ODD are reflected in the skill graphs automatically leading to a reduction in inconsistencies and errors in the constructed skill graphs.
A LiDAR-based real-time capable 3D Perception System for Automated Driving in Urban Domains
May 07, 2020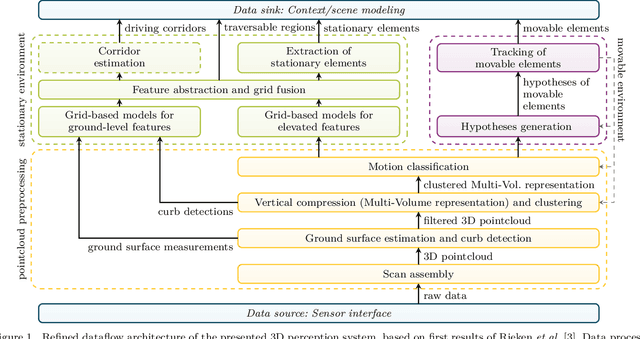

We present a LiDAR-based and real-time capable 3D perception system for automated driving in urban domains. The hierarchical system design is able to model stationary and movable parts of the environment simultaneously and under real-time conditions. Our approach extends the state of the art by innovative in-detail enhancements for perceiving road users and drivable corridors even in case of non-flat ground surfaces and overhanging or protruding elements. We describe a runtime-efficient pointcloud processing pipeline, consisting of adaptive ground surface estimation, 3D clustering and motion classification stages. Based on the pipeline's output, the stationary environment is represented in a multi-feature mapping and fusion approach. Movable elements are represented in an object tracking system capable of using multiple reference points to account for viewpoint changes. We further enhance the tracking system by explicit consideration of occlusion and ambiguity cases. Our system is evaluated using a subset of the TUBS Road User Dataset. We enhance common performance metrics by considering application-driven aspects of real-world traffic scenarios. The perception system shows impressive results and is able to cope with the addressed scenarios while still preserving real-time capability.
Representing the Unknown - Impact of Uncertainty on the Interaction between Decision Making and Trajectory Generation
Aug 07, 2018
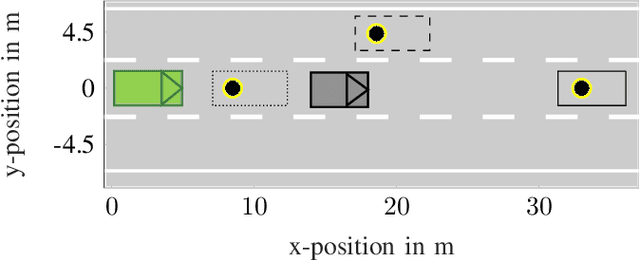
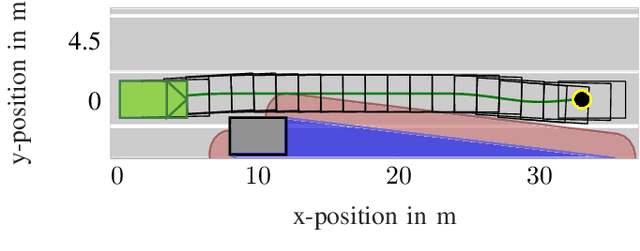
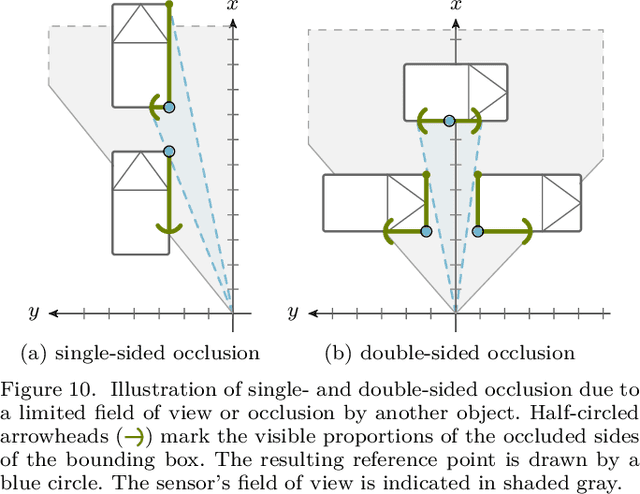
Even though motion planning for automated vehicles has been extensively discussed for more than two decades, it is still a highly active field of research with a variety of different approaches having been published in the recent years. When considering the market introduction of SAE Level 3+ vehicles, the topic of motion planning will most likely be subject to even more detailed discussions between safety and user acceptance. This paper shall discuss parameters of the motion planning problem and requirements to an environment model. The focus is put on the representation of different types of uncertainty at the example of sensor occlusion, arguing the importance of a well-defined interface between decision making and trajectory generation.
Assessment of Deep Convolutional Neural Networks for Road Surface Classification
Aug 07, 2018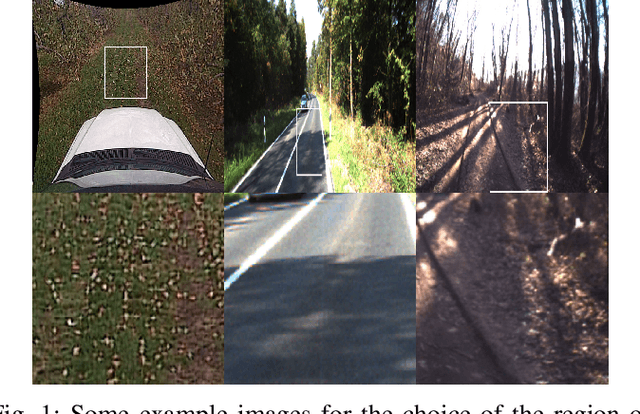
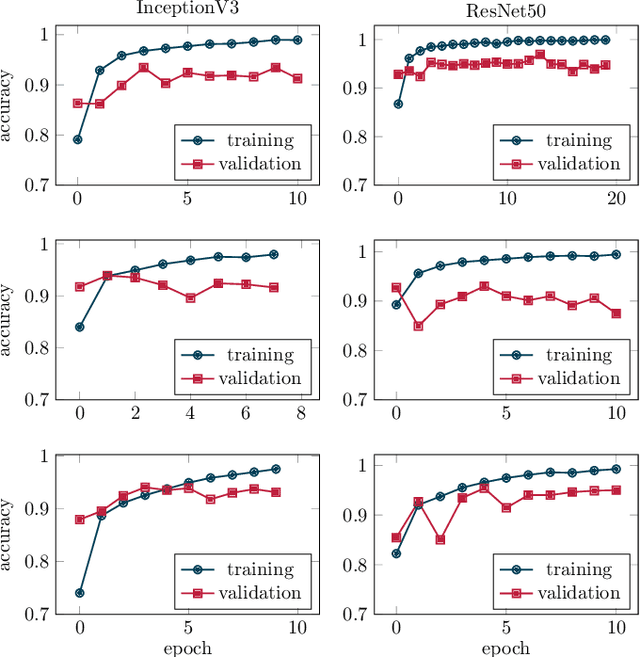

When parameterizing vehicle control algorithms for stability or trajectory control, the road-tire friction coefficient is an essential model parameter when it comes to control performance. One major impact on the friction coefficient is the condition of the road surface. A camera-based, forward-looking classification of the road-surface helps enabling an early parametrization of vehicle control algorithms. In this paper, we train and compare two different Deep Convolutional Neural Network models, regarding their application for road friction estimation and describe the challenges for training the classifier in terms of available training data and the construction of suitable datasets.
Hazard Analysis and Risk Assessment for an Automated Unmanned Protective Vehicle
May 05, 2018
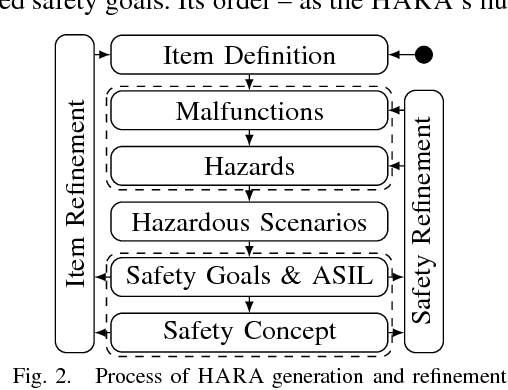

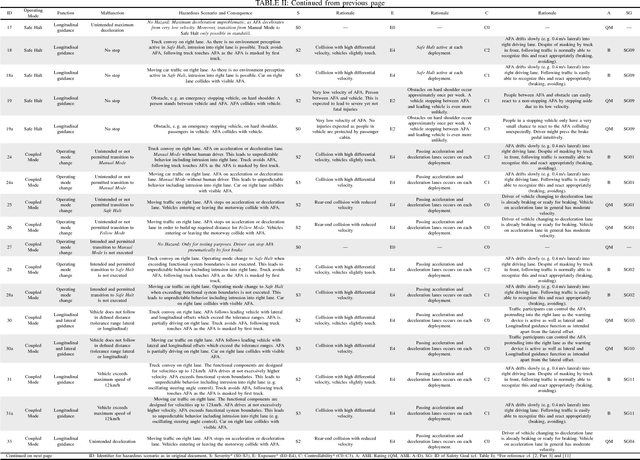
For future application of automated vehicles in public traffic, ensuring functional safety is essential. In this context, a hazard analysis and risk assessment is an important input for designing functionally vehicle automation systems. In this contribution, we present a detailed hazard analysis and risk assessment (HARA) according to the ISO 26262 standard for a specific Level 4 application, namely an unmanned protective vehicle operated without human supervision for motorway hard shoulder roadworks.
Ontology based Scene Creation for the Development of Automated Vehicles
Apr 23, 2018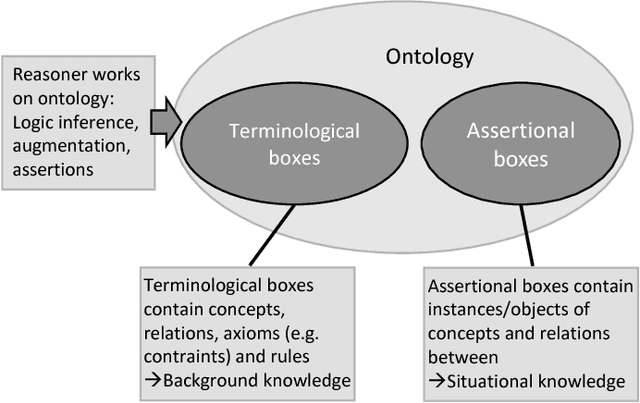
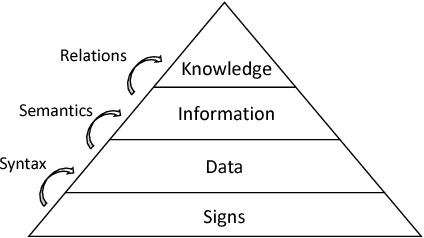
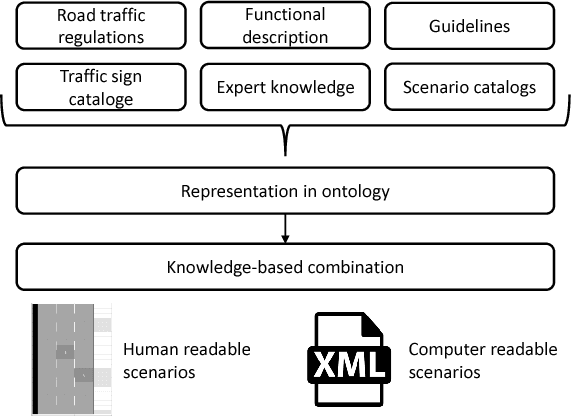
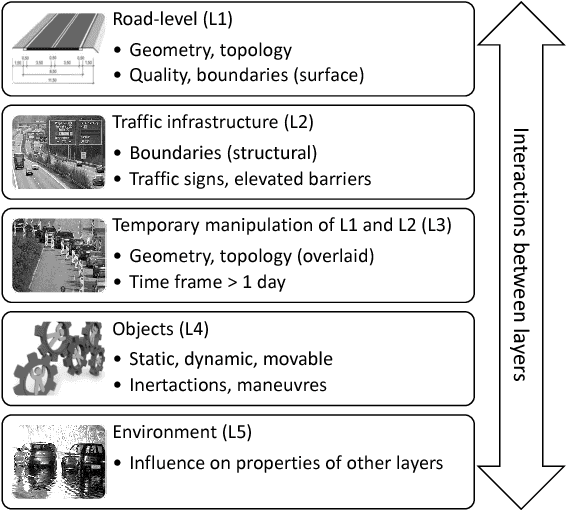
The introduction of automated vehicles without permanent human supervision demands a functional system description, including functional system boundaries and a comprehensive safety analysis. These inputs to the technical development can be identified and analyzed by a scenario-based approach. Furthermore, to establish an economical test and release process, a large number of scenarios must be identified to obtain meaningful test results. Experts are doing well to identify scenarios that are difficult to handle or unlikely to happen. However, experts are unlikely to identify all scenarios possible based on the knowledge they have on hand. Expert knowledge modeled for computer aided processing may help for the purpose of providing a wide range of scenarios. This contribution reviews ontologies as knowledge-based systems in the field of automated vehicles, and proposes a generation of traffic scenes in natural language as a basis for a scenario creation.