 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHazard Analysis and Risk Assessment for an Automated Unmanned Protective Vehicle
May 05, 2018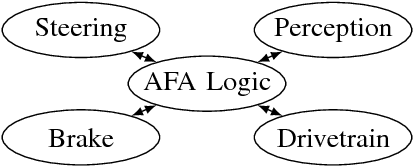
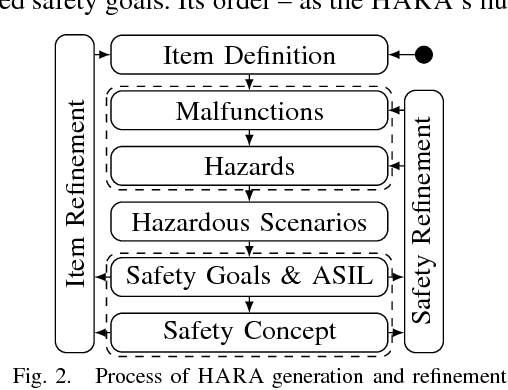

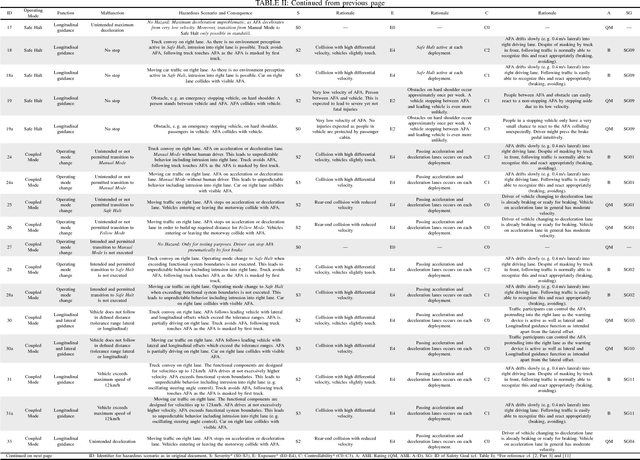
For future application of automated vehicles in public traffic, ensuring functional safety is essential. In this context, a hazard analysis and risk assessment is an important input for designing functionally vehicle automation systems. In this contribution, we present a detailed hazard analysis and risk assessment (HARA) according to the ISO 26262 standard for a specific Level 4 application, namely an unmanned protective vehicle operated without human supervision for motorway hard shoulder roadworks.
Ontology based Scene Creation for the Development of Automated Vehicles
Apr 23, 2018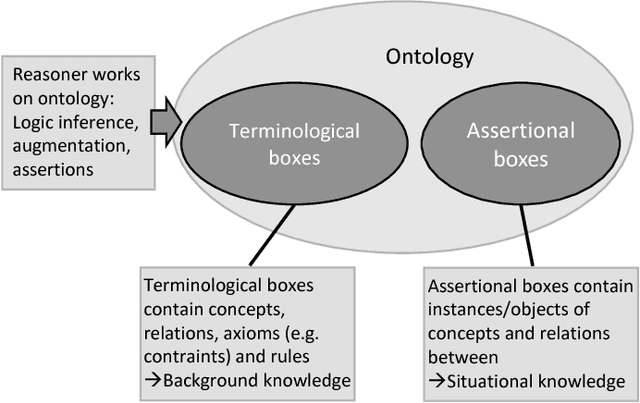
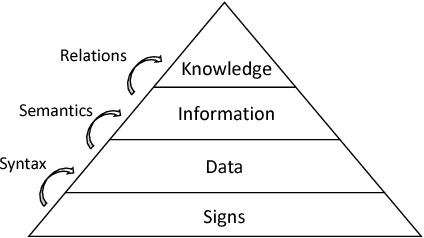
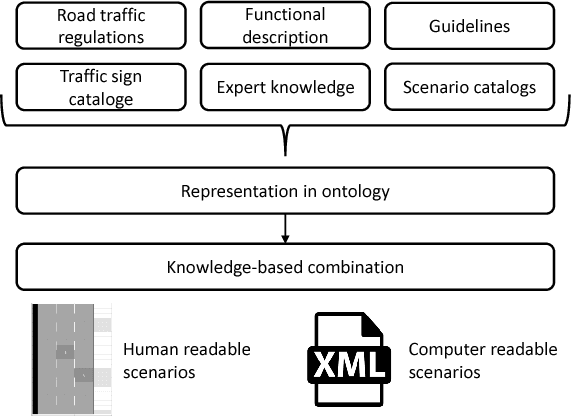
The introduction of automated vehicles without permanent human supervision demands a functional system description, including functional system boundaries and a comprehensive safety analysis. These inputs to the technical development can be identified and analyzed by a scenario-based approach. Furthermore, to establish an economical test and release process, a large number of scenarios must be identified to obtain meaningful test results. Experts are doing well to identify scenarios that are difficult to handle or unlikely to happen. However, experts are unlikely to identify all scenarios possible based on the knowledge they have on hand. Expert knowledge modeled for computer aided processing may help for the purpose of providing a wide range of scenarios. This contribution reviews ontologies as knowledge-based systems in the field of automated vehicles, and proposes a generation of traffic scenes in natural language as a basis for a scenario creation.
Towards a Functional System Architecture for Automated Vehicles
Mar 30, 2017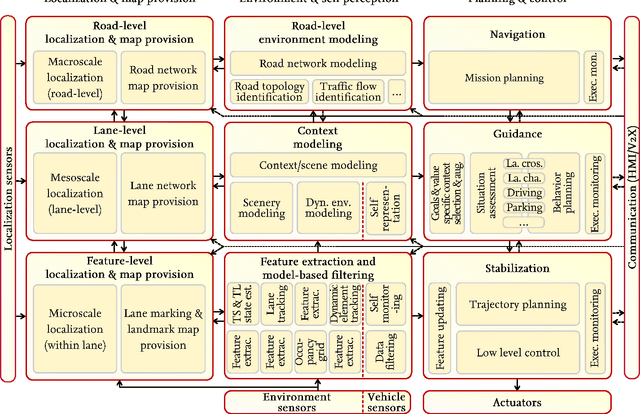
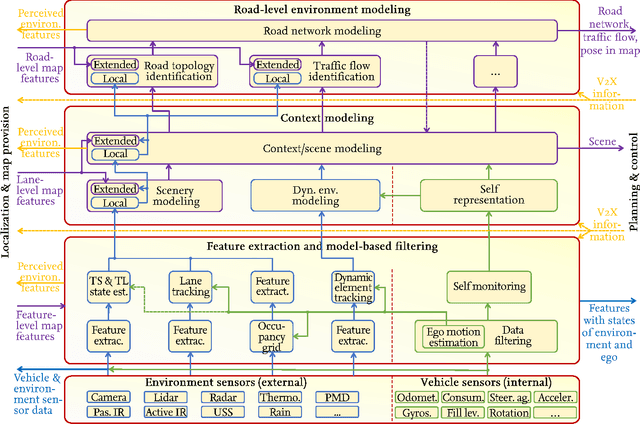

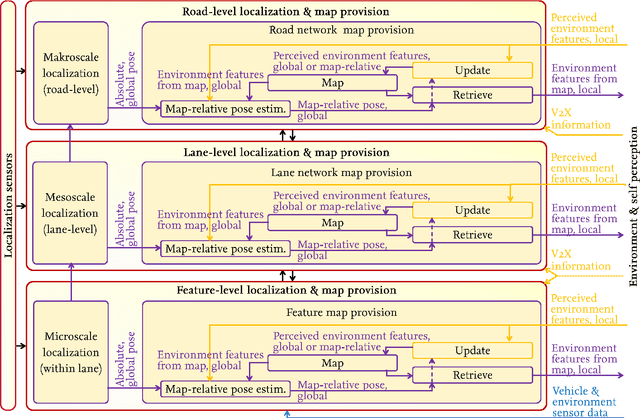
This paper presents a functional system architecture for an automated vehicle. It provides an overall, generic structure that is independent of a specific implementation of a particular vehicle project. Yet, it has been inspired and cross-checked with a real world automated driving implementation in the Stadtpilot project at the Technische Universit\"at Braunschweig. The architecture entails aspects like environment and self perception, planning and control, localization, map provision, Vehicle-To-X-communication, and interaction with human operators.