 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Ontology-based Approach Towards Traceable Behavior Specifications in Automated Driving
Sep 10, 2024Vehicles in public traffic that are equipped with Automated Driving Systems are subject to a number of expectations: Among other aspects, their behavior should be safe, conforming to the rules of the road and provide mobility to their users. This poses challenges for the developers of such systems: Developers are responsible for specifying this behavior, for example, in terms of requirements at system design time. As we will discuss in the article, this specification always involves the need for assumptions and trade-offs. As a result, insufficiencies in such a behavior specification can occur that can potentially lead to unsafe system behavior. In order to support the identification of specification insufficiencies, requirements and respective assumptions need to be made explicit. In this article, we propose the Semantic Norm Behavior Analysis as an ontology-based approach to specify the behavior for an Automated Driving System equipped vehicle. We use ontologies to formally represent specified behavior for a targeted operational environment, and to establish traceability between specified behavior and the addressed stakeholder needs. Furthermore, we illustrate the application of the Semantic Norm Behavior Analysis in two example scenarios and evaluate our results.
A Knowledge-based Approach for the Automatic Construction of Skill Graphs for Online Monitoring
Feb 15, 2021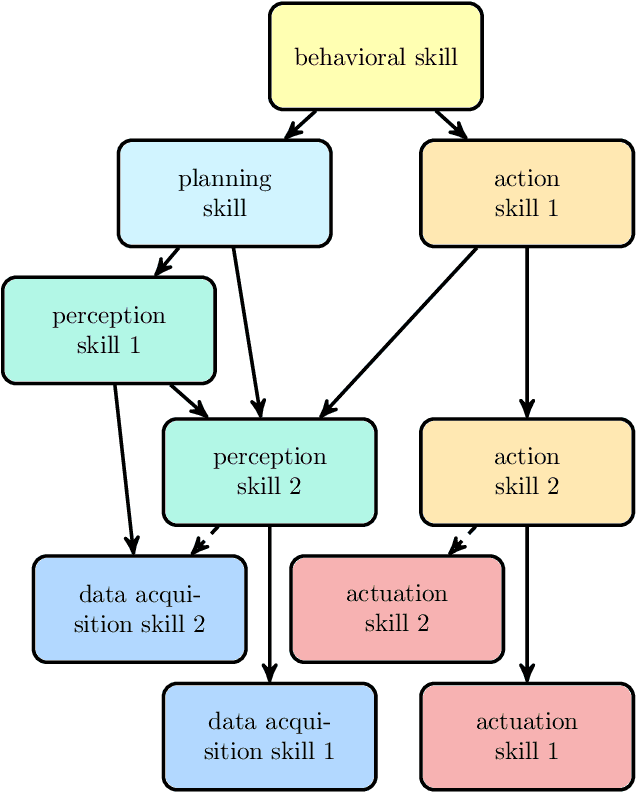
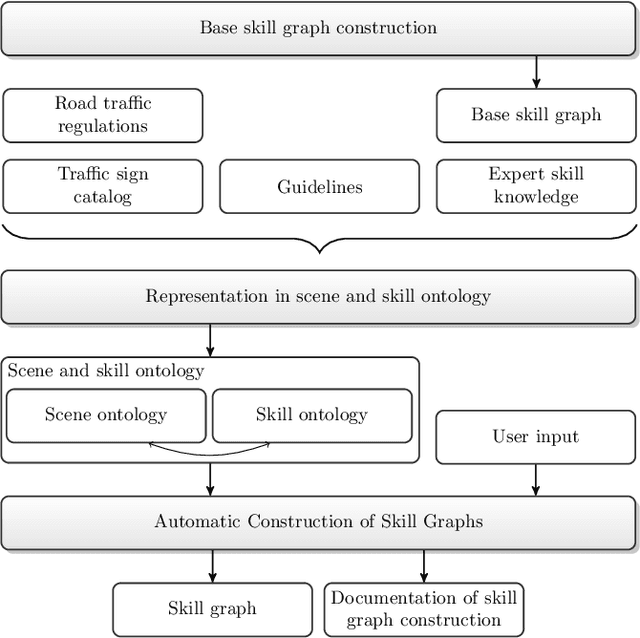
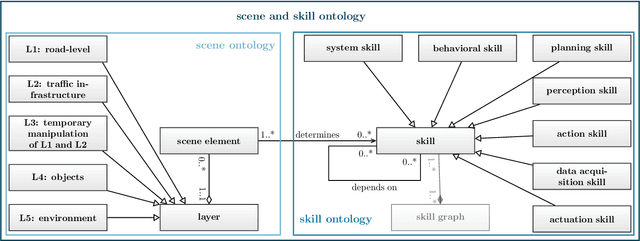

Automated vehicles need to be aware of the capabilities they currently possess. Skill graphs are directed acylic graphs in which a vehicle's capabilities and the dependencies between these capabilities are modeled. The skills a vehicle requires depend on the behaviors the vehicle has to perform and the operational design domain (ODD) of the vehicle. Skill graphs were originally proposed for online monitoring of the current capabilities of an automated vehicle. They have also been shown to be useful during other parts of the development process, e.g. system design, system verification. Skill graph construction is an iterative, expert-based, manual process with little to no guidelines. This process is, thus, prone to errors and inconsistencies especially regarding the propagation of changes in the vehicle's intended ODD into the skill graphs. In order to circumnavigate this problem, we propose to formalize expert knowledge regarding skill graph construction into a knowledge base and automate the construction process. Thus, all changes in the vehicle's ODD are reflected in the skill graphs automatically leading to a reduction in inconsistencies and errors in the constructed skill graphs.
Ontology based Scene Creation for the Development of Automated Vehicles
Apr 23, 2018
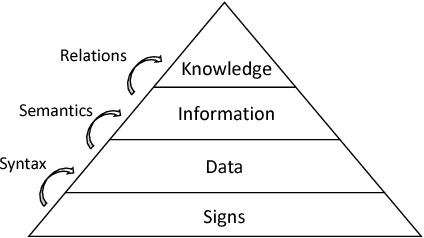
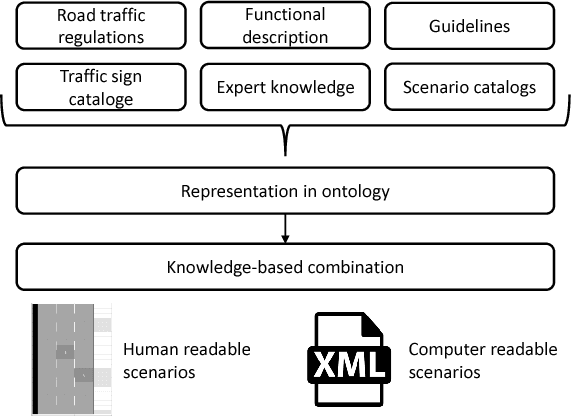
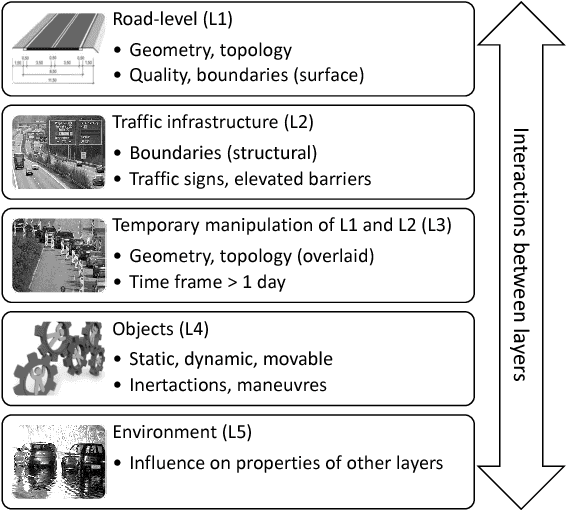
The introduction of automated vehicles without permanent human supervision demands a functional system description, including functional system boundaries and a comprehensive safety analysis. These inputs to the technical development can be identified and analyzed by a scenario-based approach. Furthermore, to establish an economical test and release process, a large number of scenarios must be identified to obtain meaningful test results. Experts are doing well to identify scenarios that are difficult to handle or unlikely to happen. However, experts are unlikely to identify all scenarios possible based on the knowledge they have on hand. Expert knowledge modeled for computer aided processing may help for the purpose of providing a wide range of scenarios. This contribution reviews ontologies as knowledge-based systems in the field of automated vehicles, and proposes a generation of traffic scenes in natural language as a basis for a scenario creation.