 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynth It Like KITTI: Synthetic Data Generation for Object Detection in Driving Scenarios
Feb 20, 2025



An important factor in advancing autonomous driving systems is simulation. Yet, there is rather small progress for transferability between the virtual and real world. We revisit this problem for 3D object detection on LiDAR point clouds and propose a dataset generation pipeline based on the CARLA simulator. Utilizing domain randomization strategies and careful modeling, we are able to train an object detector on the synthetic data and demonstrate strong generalization capabilities to the KITTI dataset. Furthermore, we compare different virtual sensor variants to gather insights, which sensor attributes can be responsible for the prevalent domain gap. Finally, fine-tuning with a small portion of real data almost matches the baseline and with the full training set slightly surpasses it.
A Knowledge-based Approach for the Automatic Construction of Skill Graphs for Online Monitoring
Feb 15, 2021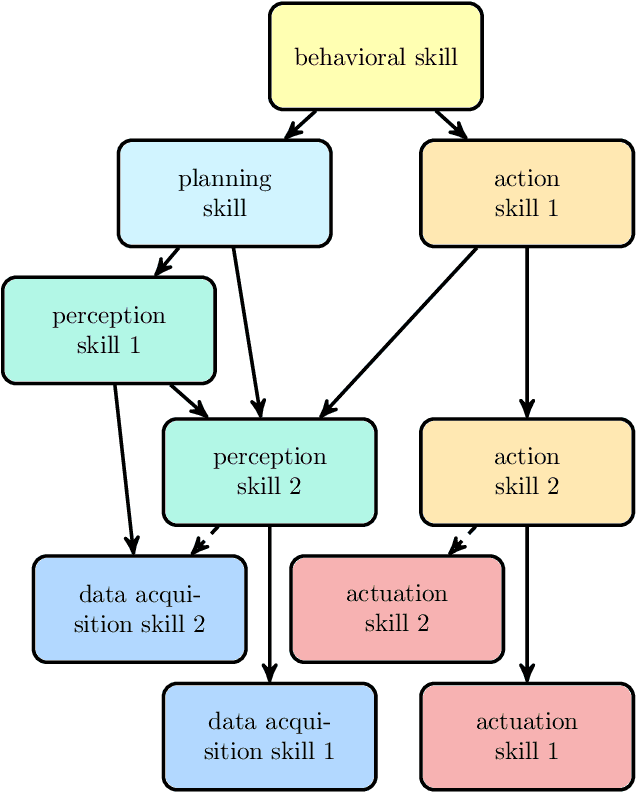
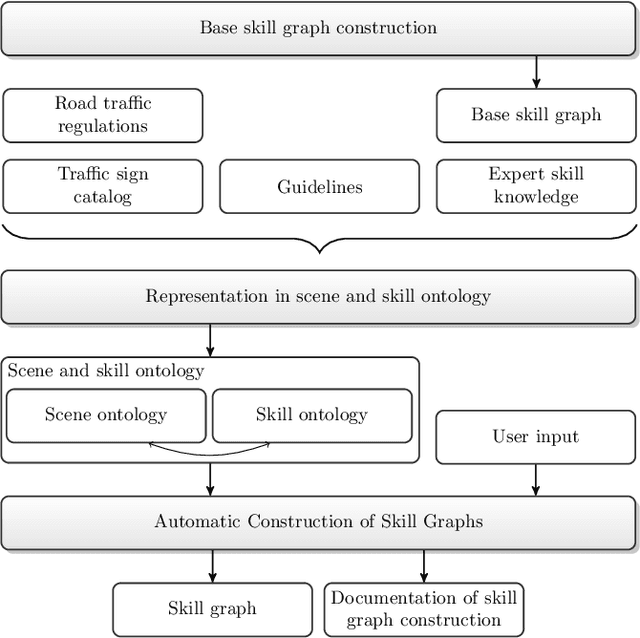
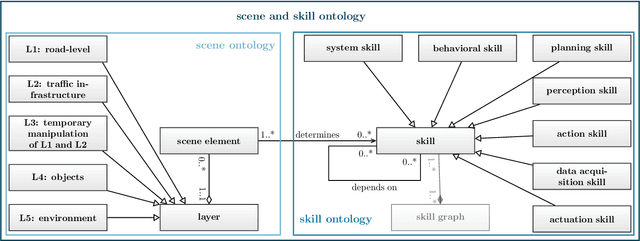

Automated vehicles need to be aware of the capabilities they currently possess. Skill graphs are directed acylic graphs in which a vehicle's capabilities and the dependencies between these capabilities are modeled. The skills a vehicle requires depend on the behaviors the vehicle has to perform and the operational design domain (ODD) of the vehicle. Skill graphs were originally proposed for online monitoring of the current capabilities of an automated vehicle. They have also been shown to be useful during other parts of the development process, e.g. system design, system verification. Skill graph construction is an iterative, expert-based, manual process with little to no guidelines. This process is, thus, prone to errors and inconsistencies especially regarding the propagation of changes in the vehicle's intended ODD into the skill graphs. In order to circumnavigate this problem, we propose to formalize expert knowledge regarding skill graph construction into a knowledge base and automate the construction process. Thus, all changes in the vehicle's ODD are reflected in the skill graphs automatically leading to a reduction in inconsistencies and errors in the constructed skill graphs.