 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynth It Like KITTI: Synthetic Data Generation for Object Detection in Driving Scenarios
Feb 20, 2025



An important factor in advancing autonomous driving systems is simulation. Yet, there is rather small progress for transferability between the virtual and real world. We revisit this problem for 3D object detection on LiDAR point clouds and propose a dataset generation pipeline based on the CARLA simulator. Utilizing domain randomization strategies and careful modeling, we are able to train an object detector on the synthetic data and demonstrate strong generalization capabilities to the KITTI dataset. Furthermore, we compare different virtual sensor variants to gather insights, which sensor attributes can be responsible for the prevalent domain gap. Finally, fine-tuning with a small portion of real data almost matches the baseline and with the full training set slightly surpasses it.
GAN-Based LiDAR Intensity Simulation
Nov 26, 2023Realistic vehicle sensor simulation is an important element in developing autonomous driving. As physics-based implementations of visual sensors like LiDAR are complex in practice, data-based approaches promise solutions. Using pairs of camera images and LiDAR scans from real test drives, GANs can be trained to translate between them. For this process, we contribute two additions. First, we exploit the camera images, acquiring segmentation data and dense depth maps as additional input for training. Second, we test the performance of the LiDAR simulation by testing how well an object detection network generalizes between real and synthetic point clouds to enable evaluation without ground truth point clouds. Combining both, we simulate LiDAR point clouds and demonstrate their realism.
A Lightweight Machine Learning Pipeline for LiDAR-simulation
Aug 05, 2022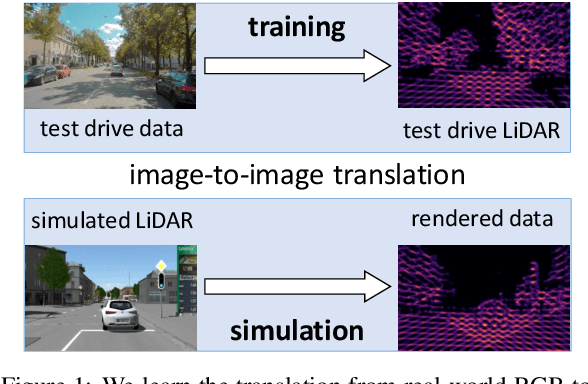


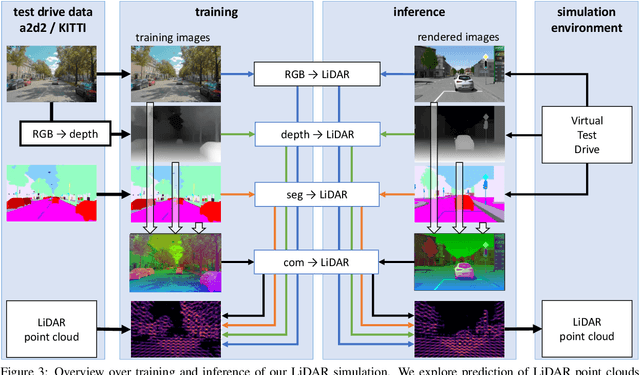
Virtual testing is a crucial task to ensure safety in autonomous driving, and sensor simulation is an important task in this domain. Most current LiDAR simulations are very simplistic and are mainly used to perform initial tests, while the majority of insights are gathered on the road. In this paper, we propose a lightweight approach for more realistic LiDAR simulation that learns a real sensor's behavior from test drive data and transforms this to the virtual domain. The central idea is to cast the simulation into an image-to-image translation problem. We train our pix2pix based architecture on two real world data sets, namely the popular KITTI data set and the Audi Autonomous Driving Dataset which provide both, RGB and LiDAR images. We apply this network on synthetic renderings and show that it generalizes sufficiently from real images to simulated images. This strategy enables to skip the sensor-specific, expensive and complex LiDAR physics simulation in our synthetic world and avoids oversimplification and a large domain-gap through the clean synthetic environment.
* Conference: DeLTA 22; ISBN 978-989-758-584-5; ISSN 2184-9277; publisher: SciTePress, organization: INSTICC