 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Ontology-based Approach Towards Traceable Behavior Specifications in Automated Driving
Sep 10, 2024
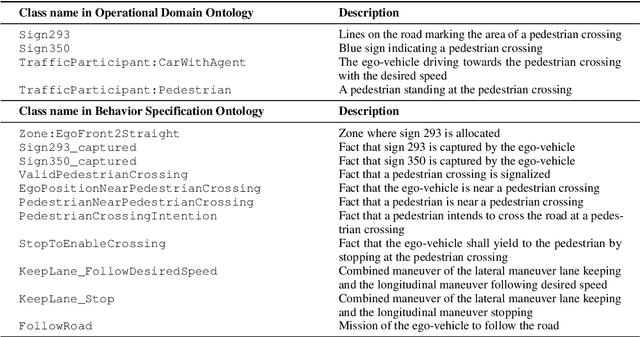


Vehicles in public traffic that are equipped with Automated Driving Systems are subject to a number of expectations: Among other aspects, their behavior should be safe, conforming to the rules of the road and provide mobility to their users. This poses challenges for the developers of such systems: Developers are responsible for specifying this behavior, for example, in terms of requirements at system design time. As we will discuss in the article, this specification always involves the need for assumptions and trade-offs. As a result, insufficiencies in such a behavior specification can occur that can potentially lead to unsafe system behavior. In order to support the identification of specification insufficiencies, requirements and respective assumptions need to be made explicit. In this article, we propose the Semantic Norm Behavior Analysis as an ontology-based approach to specify the behavior for an Automated Driving System equipped vehicle. We use ontologies to formally represent specified behavior for a targeted operational environment, and to establish traceability between specified behavior and the addressed stakeholder needs. Furthermore, we illustrate the application of the Semantic Norm Behavior Analysis in two example scenarios and evaluate our results.
Towards Scenario- and Capability-Driven Dataset Development and Evaluation: An Approach in the Context of Mapless Automated Driving
Apr 30, 2024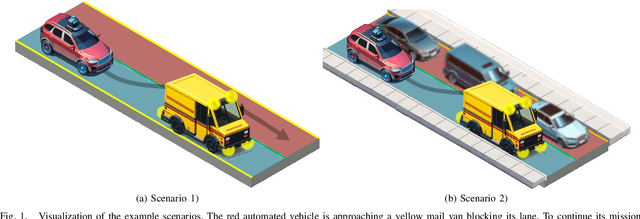


The foundational role of datasets in defining the capabilities of deep learning models has led to their rapid proliferation. At the same time, published research focusing on the process of dataset development for environment perception in automated driving has been scarce, thereby reducing the applicability of openly available datasets and impeding the development of effective environment perception systems. Sensor-based, mapless automated driving is one of the contexts where this limitation is evident. While leveraging real-time sensor data, instead of pre-defined HD maps promises enhanced adaptability and safety by effectively navigating unexpected environmental changes, it also increases the demands on the scope and complexity of the information provided by the perception system. To address these challenges, we propose a scenario- and capability-based approach to dataset development. Grounded in the principles of ISO 21448 (safety of the intended functionality, SOTIF), extended by ISO/TR 4804, our approach facilitates the structured derivation of dataset requirements. This not only aids in the development of meaningful new datasets but also enables the effective comparison of existing ones. Applying this methodology to a broad range of existing lane detection datasets, we identify significant limitations in current datasets, particularly in terms of real-world applicability, a lack of labeling of critical features, and an absence of comprehensive information for complex driving maneuvers.
A Robust Hybrid Observer for Side-slip Angle Estimation
Jun 07, 2023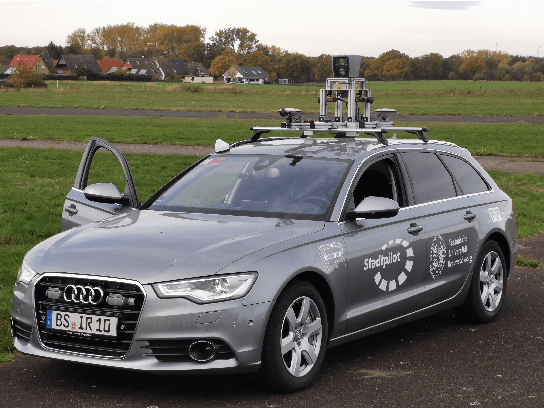
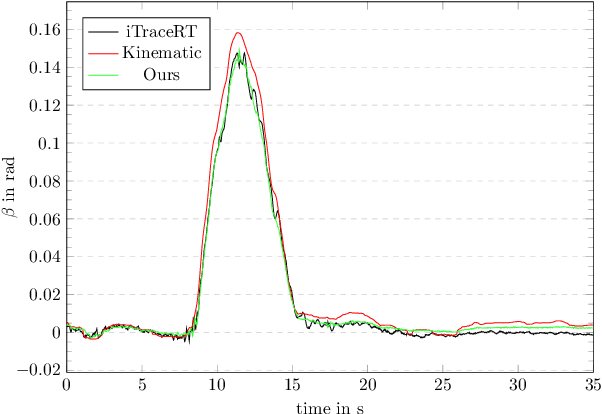
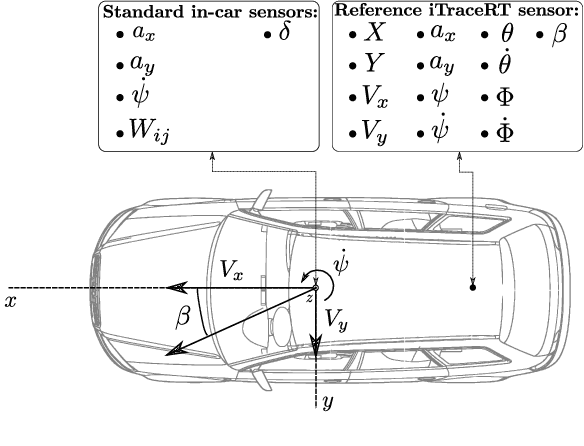
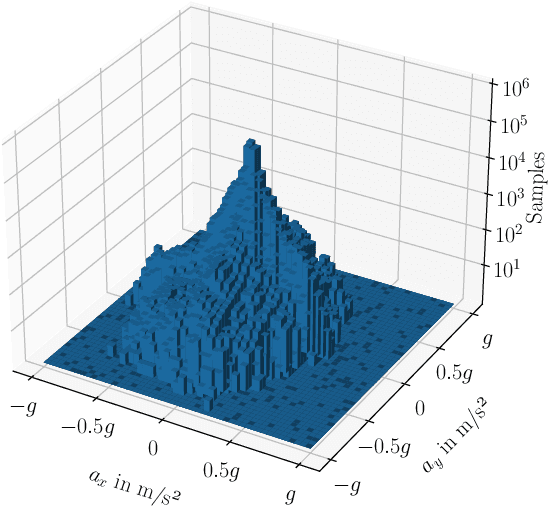
For autonomous driving or advanced driving assistance, it is key to monitor the vehicle dynamics behavior. Accurate models of this behavior include acceleration, but also the side-slip angle, that eventually results from the complex interaction between the tires and the road. Though it is an essential quantity (e.g. for stability assessment), as opposed to accelerations, it is not measurable through conventional off-the-shelf sensors. Therefore, accurate side-slip angle observers are necessary for the proper planning and control of vehicles. In this paper, we introduce a novel approach that combines model-based side-slip angle estimation with neural networks. We apply our approach to real vehicle data. We prove that the proposed method is able to outperform state-of-the-art methods for normal driving maneuvers, and for near-limits maneuvers where providing accurate estimations becomes challenging.
Robust LSTM-based Vehicle Velocity Observer for Regular and Near-limits Applications
Mar 31, 2023
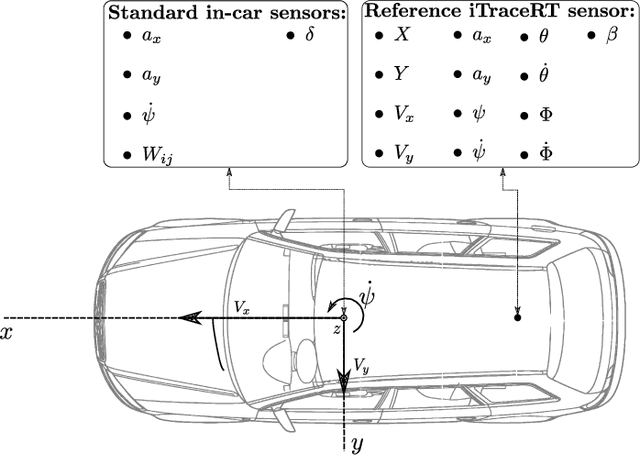
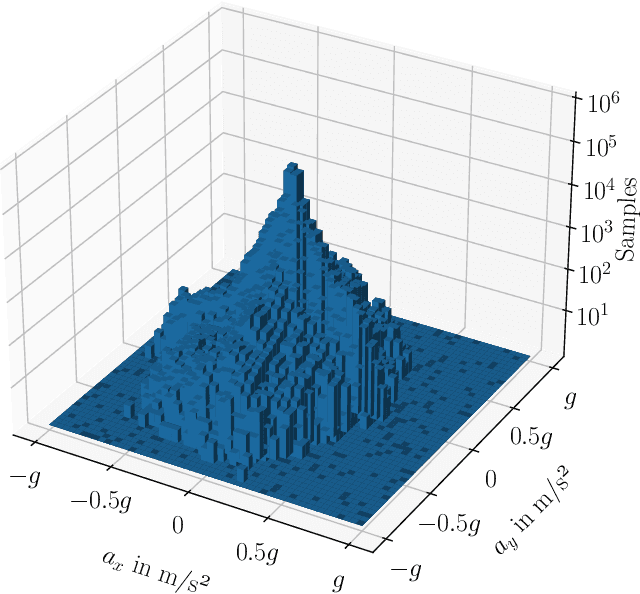
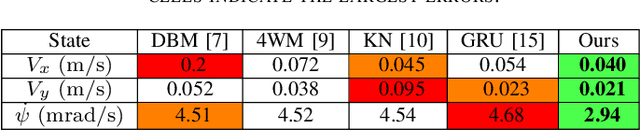
Accurate velocity estimation is key to vehicle control. While the literature describes how model-based and learning-based observers are able to estimate a vehicle's velocity in normal driving conditions, the challenge remains to estimate the velocity in near-limits maneuvers while using only conventional in-car sensors. In this paper, we introduce a novel neural network architecture based on Long Short-Term Memory (LSTM) networks to accurately estimate the vehicle's velocity in different driving conditions, including maneuvers at the limits of handling. The approach has been tested on real vehicle data and it provides more accurate estimations than state-of-the-art model-based and learning-based methods, for both regular and near-limits driving scenarios. Our approach is robust since the performance of the state-of-the-art observers deteriorates with higher dynamics, while our method adapts to different maneuvers, providing accurate estimations even at the vehicle's limits of handling.
Representing the Unknown - Impact of Uncertainty on the Interaction between Decision Making and Trajectory Generation
Aug 07, 2018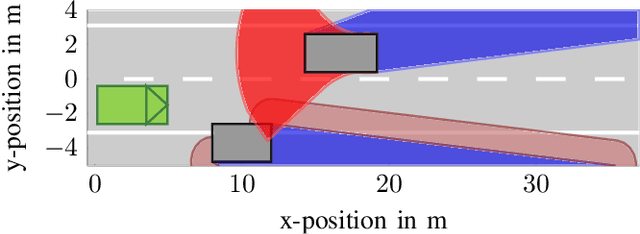
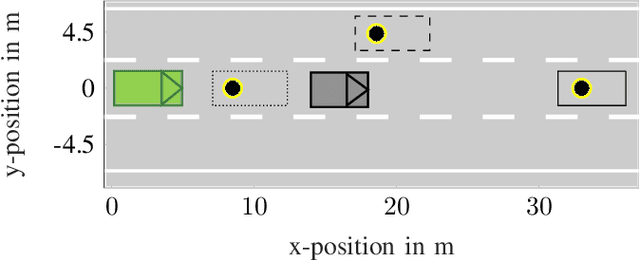
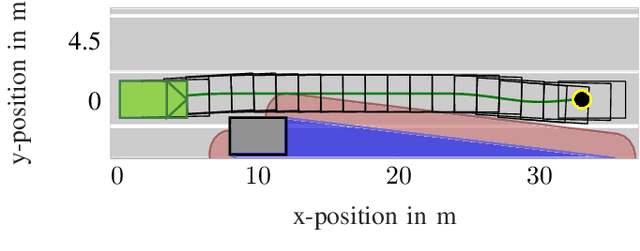
Even though motion planning for automated vehicles has been extensively discussed for more than two decades, it is still a highly active field of research with a variety of different approaches having been published in the recent years. When considering the market introduction of SAE Level 3+ vehicles, the topic of motion planning will most likely be subject to even more detailed discussions between safety and user acceptance. This paper shall discuss parameters of the motion planning problem and requirements to an environment model. The focus is put on the representation of different types of uncertainty at the example of sensor occlusion, arguing the importance of a well-defined interface between decision making and trajectory generation.
Assessment of Deep Convolutional Neural Networks for Road Surface Classification
Aug 07, 2018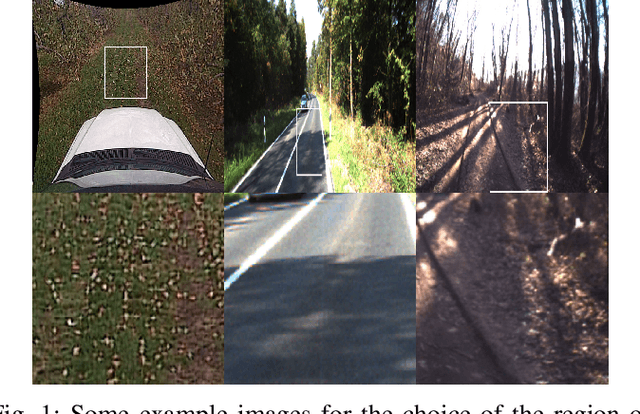
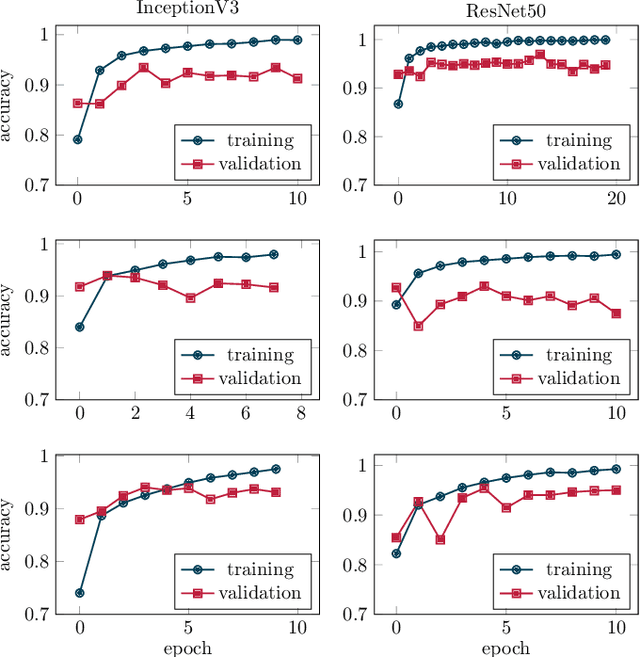

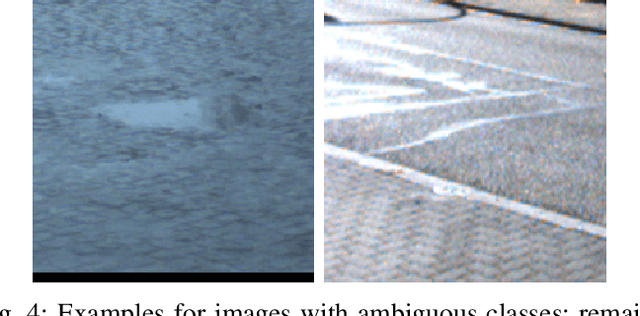
When parameterizing vehicle control algorithms for stability or trajectory control, the road-tire friction coefficient is an essential model parameter when it comes to control performance. One major impact on the friction coefficient is the condition of the road surface. A camera-based, forward-looking classification of the road-surface helps enabling an early parametrization of vehicle control algorithms. In this paper, we train and compare two different Deep Convolutional Neural Network models, regarding their application for road friction estimation and describe the challenges for training the classifier in terms of available training data and the construction of suitable datasets.
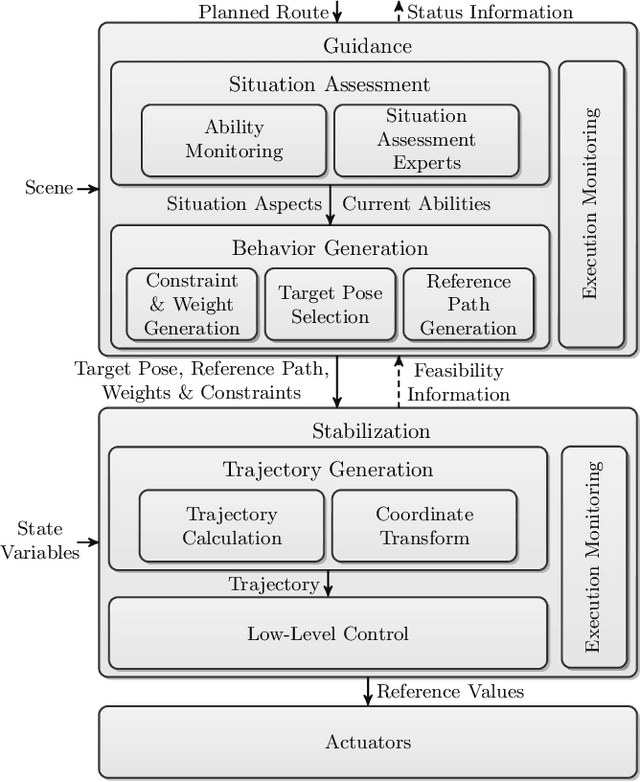
Towards a Functional System Architecture for Automated Vehicles
Mar 30, 2017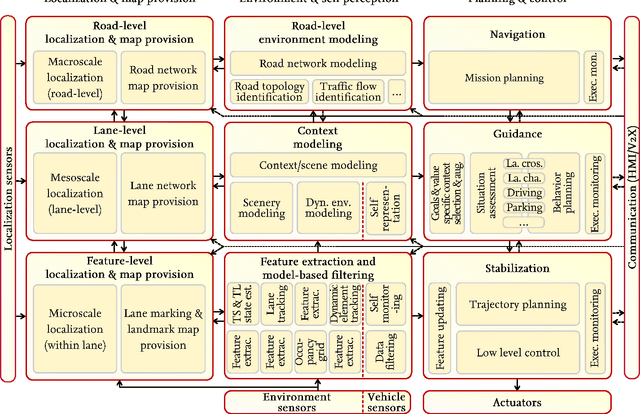
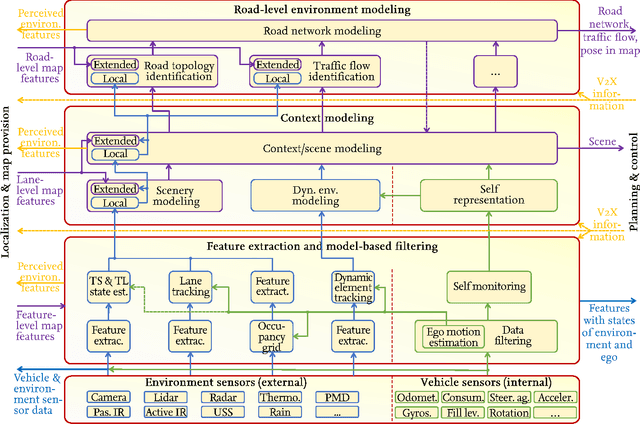

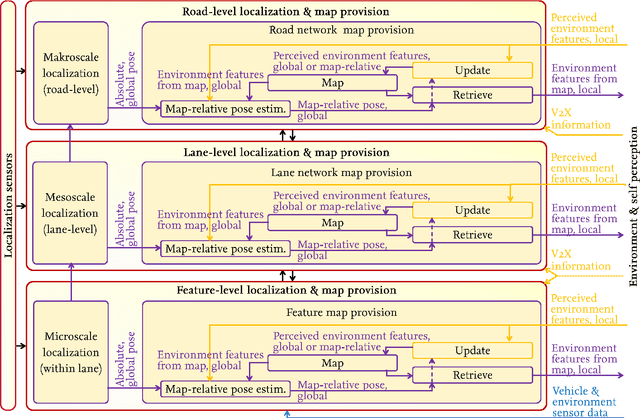
This paper presents a functional system architecture for an automated vehicle. It provides an overall, generic structure that is independent of a specific implementation of a particular vehicle project. Yet, it has been inspired and cross-checked with a real world automated driving implementation in the Stadtpilot project at the Technische Universit\"at Braunschweig. The architecture entails aspects like environment and self perception, planning and control, localization, map provision, Vehicle-To-X-communication, and interaction with human operators.