Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Functional System Architecture for Automated Vehicles
Paper and Code
Mar 30, 2017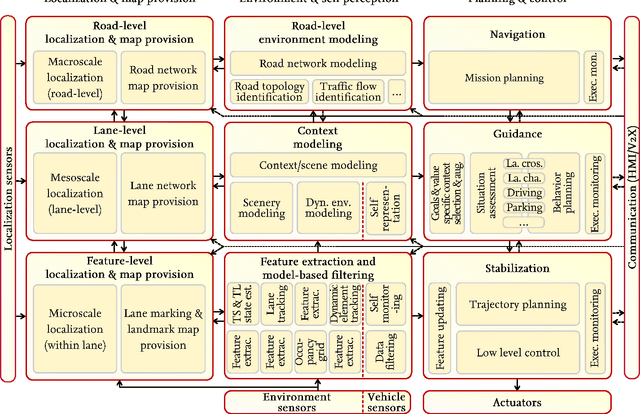
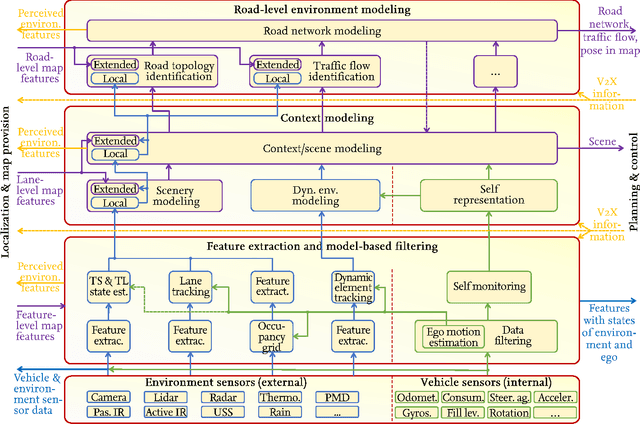

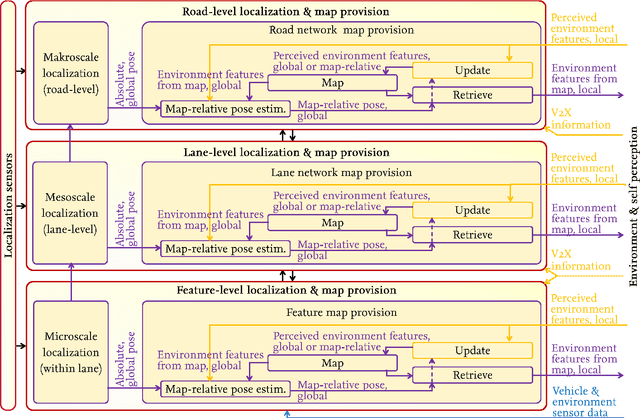
This paper presents a functional system architecture for an automated vehicle. It provides an overall, generic structure that is independent of a specific implementation of a particular vehicle project. Yet, it has been inspired and cross-checked with a real world automated driving implementation in the Stadtpilot project at the Technische Universit\"at Braunschweig. The architecture entails aspects like environment and self perception, planning and control, localization, map provision, Vehicle-To-X-communication, and interaction with human operators.
* Submitted for review to IEEE Transactions on Intelligent
Transportation Systems, 16 pages, 4 figures
View paper on