 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust LSTM-based Vehicle Velocity Observer for Regular and Near-limits Applications
Paper and Code
Mar 31, 2023
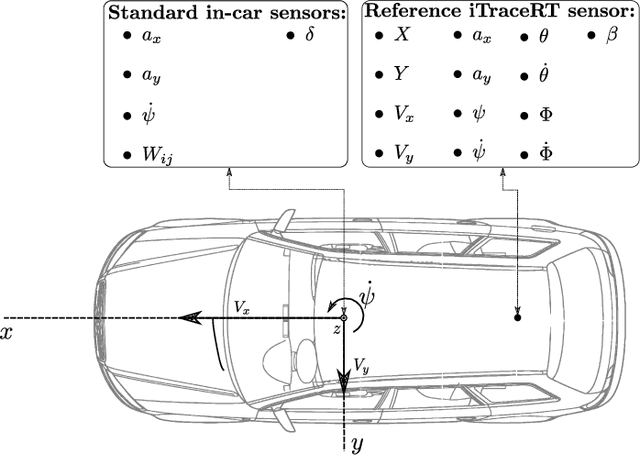
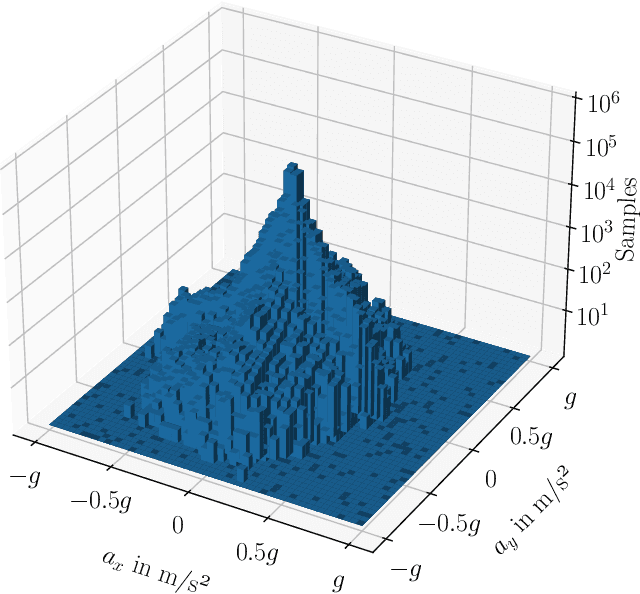
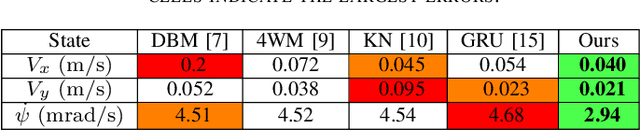
Accurate velocity estimation is key to vehicle control. While the literature describes how model-based and learning-based observers are able to estimate a vehicle's velocity in normal driving conditions, the challenge remains to estimate the velocity in near-limits maneuvers while using only conventional in-car sensors. In this paper, we introduce a novel neural network architecture based on Long Short-Term Memory (LSTM) networks to accurately estimate the vehicle's velocity in different driving conditions, including maneuvers at the limits of handling. The approach has been tested on real vehicle data and it provides more accurate estimations than state-of-the-art model-based and learning-based methods, for both regular and near-limits driving scenarios. Our approach is robust since the performance of the state-of-the-art observers deteriorates with higher dynamics, while our method adapts to different maneuvers, providing accurate estimations even at the vehicle's limits of handling.