 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Validity in Observers: When to Increase the Complexity of Your Model?
Feb 08, 2025



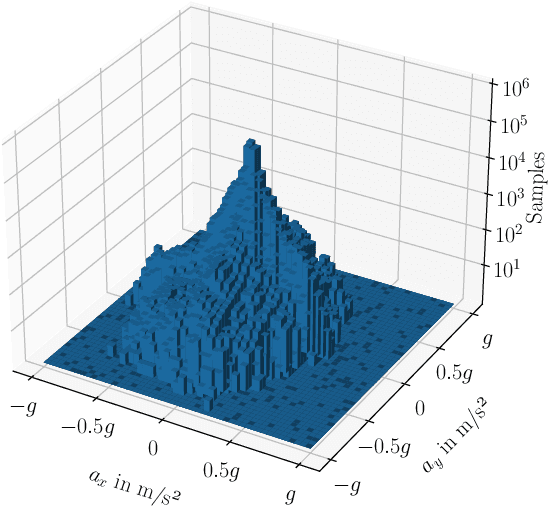
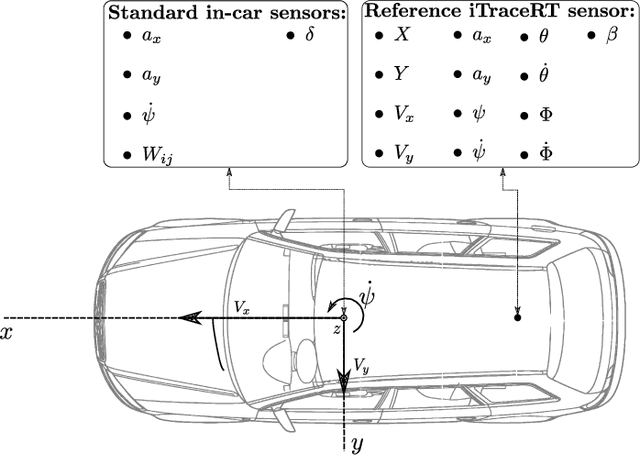
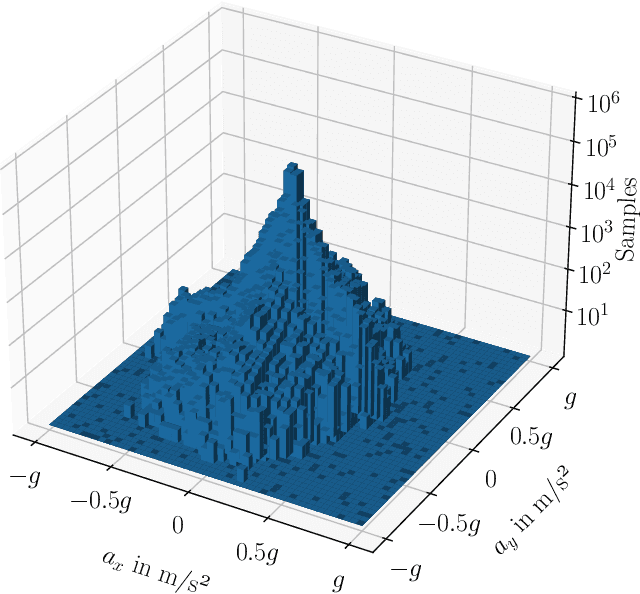
Model validity is key to the accurate and safe behavior of autonomous vehicles. Using invalid vehicle models in the different plan and control vehicle frameworks puts the stability of the vehicle, and thus its safety at stake. In this work, we analyze the validity of several popular vehicle models used in the literature with respect to a real vehicle and we prove that serious accuracy issues are encountered beyond a specific lateral acceleration point. We set a clear lateral acceleration domain in which the used models are an accurate representation of the behavior of the vehicle. We then target the necessity of using learned methods to model the vehicle's behavior. The effects of model validity on state observers are investigated. The performance of model-based observers is compared to learning-based ones. Overall, the presented work emphasizes the validity of vehicle models and presents clear operational domains in which models could be used safely.
The Hybrid Extended Bicycle: A Simple Model for High Dynamic Vehicle Trajectory Planning
Jun 08, 2023While highly automated driving relies most of the time on a smooth driving assumption, the possibility of a vehicle performing harsh maneuvers with high dynamic driving to face unexpected events is very likely. The modeling of the behavior of the vehicle in these events is crucial to proper planning and controlling; the used model should present accurate and computationally efficient properties. In this article, we propose an LSTM-based hybrid extended bicycle model able to present an accurate description of the state of the vehicle for both normal and aggressive situations. The introduced model is used in an MPPI framework for planning trajectories in high-dynamic scenarios where other simple models fail.
A Robust Hybrid Observer for Side-slip Angle Estimation
Jun 07, 2023
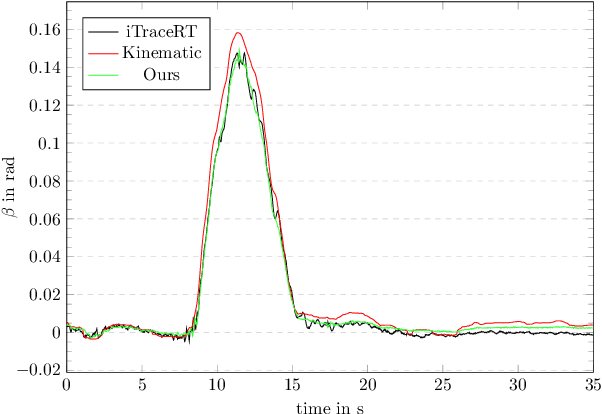
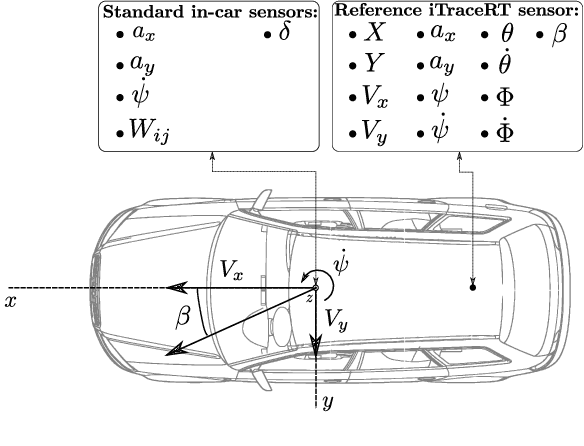
For autonomous driving or advanced driving assistance, it is key to monitor the vehicle dynamics behavior. Accurate models of this behavior include acceleration, but also the side-slip angle, that eventually results from the complex interaction between the tires and the road. Though it is an essential quantity (e.g. for stability assessment), as opposed to accelerations, it is not measurable through conventional off-the-shelf sensors. Therefore, accurate side-slip angle observers are necessary for the proper planning and control of vehicles. In this paper, we introduce a novel approach that combines model-based side-slip angle estimation with neural networks. We apply our approach to real vehicle data. We prove that the proposed method is able to outperform state-of-the-art methods for normal driving maneuvers, and for near-limits maneuvers where providing accurate estimations becomes challenging.
Learning-based Observer Evaluated on the Kinematic Bicycle Model
Mar 31, 2023The knowledge of the states of a vehicle is a necessity to perform proper planning and control. These quantities are usually accessible through measurements. Control theory brings extremely useful methods -- observers -- to deal with quantities that cannot be directly measured or with noisy measurements. Classical observers are mathematically derived from models. In spite of their success, such as the Kalman filter, they show their limits when systems display high non-linearities, modeling errors, high uncertainties or difficult interactions with the environment (e.g. road contact). In this work, we present a method to build a learning-based observer able to outperform classical observing methods. We compare several neural network architectures and define the data generation procedure used to train them. The method is evaluated on a kinematic bicycle model which allows to easily generate data for training and testing. This model is also used in an Extended Kalman Filter (EKF) for comparison of the learning-based observer with a state of the art model-based observer. The results prove the interest of our approach and pave the way for future improvements of the technique.
Robust LSTM-based Vehicle Velocity Observer for Regular and Near-limits Applications
Mar 31, 2023
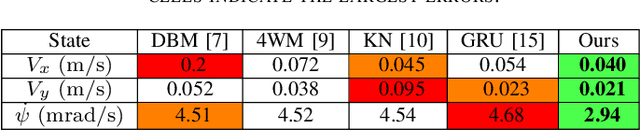
Accurate velocity estimation is key to vehicle control. While the literature describes how model-based and learning-based observers are able to estimate a vehicle's velocity in normal driving conditions, the challenge remains to estimate the velocity in near-limits maneuvers while using only conventional in-car sensors. In this paper, we introduce a novel neural network architecture based on Long Short-Term Memory (LSTM) networks to accurately estimate the vehicle's velocity in different driving conditions, including maneuvers at the limits of handling. The approach has been tested on real vehicle data and it provides more accurate estimations than state-of-the-art model-based and learning-based methods, for both regular and near-limits driving scenarios. Our approach is robust since the performance of the state-of-the-art observers deteriorates with higher dynamics, while our method adapts to different maneuvers, providing accurate estimations even at the vehicle's limits of handling.
Coupled Longitudinal and Lateral Control of a Vehicle using Deep Learning
Oct 22, 2018
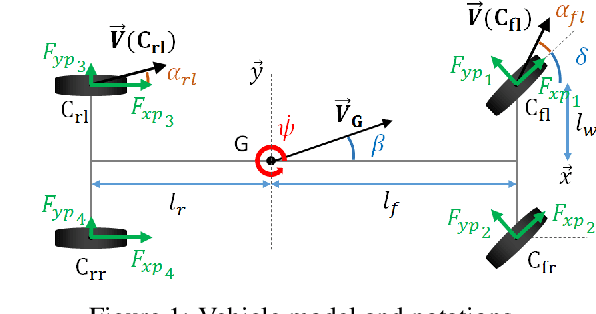
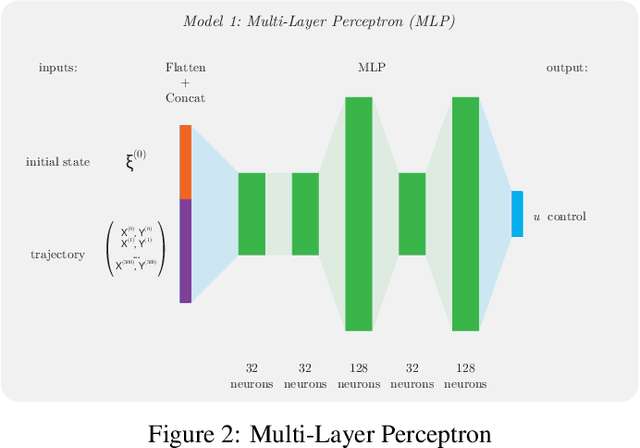
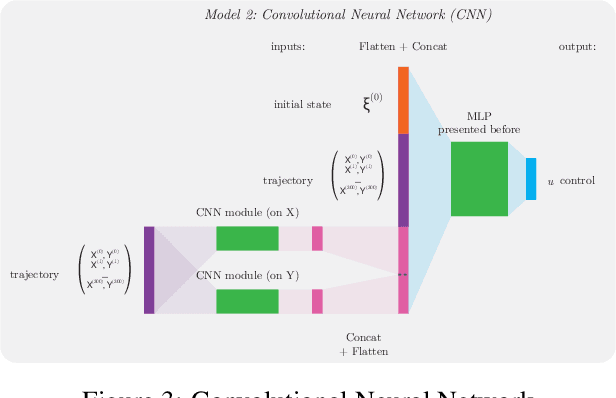
This paper explores the capability of deep neural networks to capture key characteristics of vehicle dynamics, and their ability to perform coupled longitudinal and lateral control of a vehicle. To this extent, two different artificial neural networks are trained to compute vehicle controls corresponding to a reference trajectory, using a dataset based on high-fidelity simulations of vehicle dynamics. In this study, control inputs are chosen as the steering angle of the front wheels, and the applied torque on each wheel. The performance of both models, namely a Multi-Layer Perceptron (MLP) and a Convolutional Neural Network (CNN), is evaluated based on their ability to drive the vehicle on a challenging test track, shifting between long straight lines and tight curves. A comparison to conventional decoupled controllers on the same track is also provided.
Finite-Time Stabilization of Longitudinal Control for Autonomous Vehicles via a Model-Free Approach
Apr 05, 2017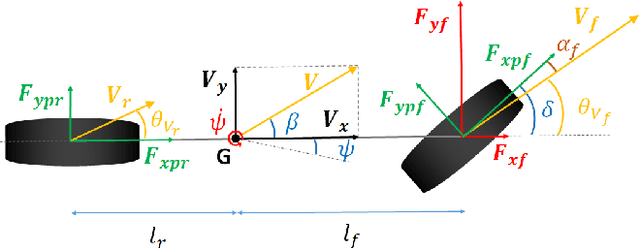


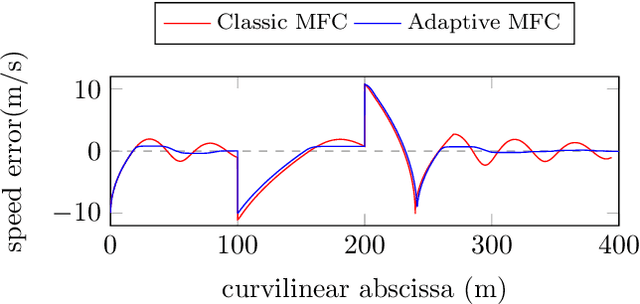
This communication presents a longitudinal model-free control approach for computing the wheel torque command to be applied on a vehicle. This setting enables us to overcome the problem of unknown vehicle parameters for generating a suitable control law. An important parameter in this control setting is made time-varying for ensuring finite-time stability. Several convincing computer simulations are displayed and discussed. Overshoots become therefore smaller. The driving comfort is increased and the robustness to time-delays is improved.