 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepresenting the Unknown - Impact of Uncertainty on the Interaction between Decision Making and Trajectory Generation
Paper and Code
Aug 07, 2018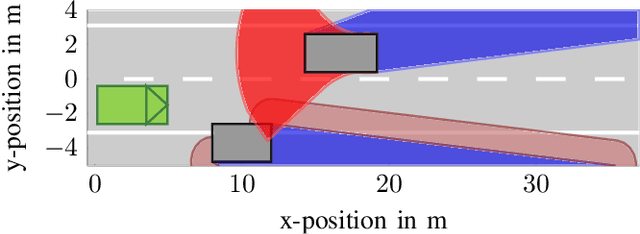
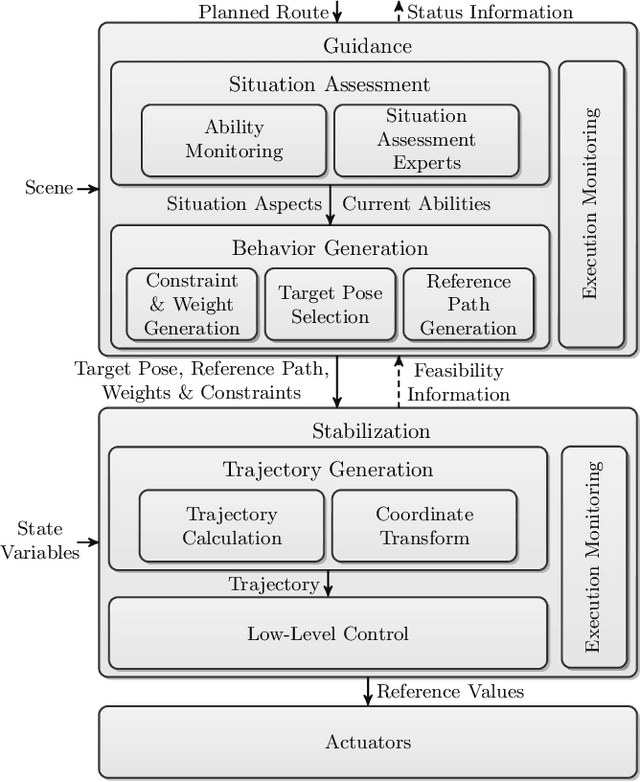
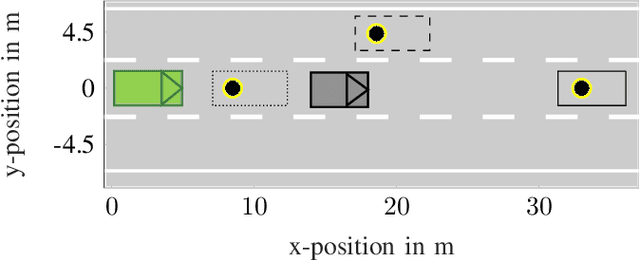
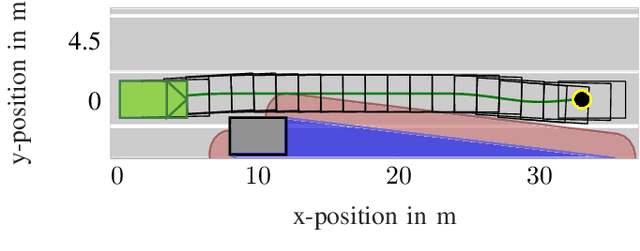
Even though motion planning for automated vehicles has been extensively discussed for more than two decades, it is still a highly active field of research with a variety of different approaches having been published in the recent years. When considering the market introduction of SAE Level 3+ vehicles, the topic of motion planning will most likely be subject to even more detailed discussions between safety and user acceptance. This paper shall discuss parameters of the motion planning problem and requirements to an environment model. The focus is put on the representation of different types of uncertainty at the example of sensor occlusion, arguing the importance of a well-defined interface between decision making and trajectory generation.