 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformal Prediction of Motion Control Performance for an Automated Vehicle in Presence of Actuator Degradations and Failures
Apr 25, 2024



Automated driving systems require monitoring mechanisms to ensure safe operation, especially if system components degrade or fail. Their runtime self-representation plays a key role as it provides a-priori knowledge about the system's capabilities and limitations. In this paper, we propose a data-driven approach for deriving such a self-representation model for the motion controller of an automated vehicle. A conformalized prediction model is learned and allows estimating how operational conditions as well as potential degradations and failures of the vehicle's actuators impact motion control performance. During runtime behavior generation, our predictor can provide a heuristic for determining the admissible action space.
Actuator Fault-Tolerant Vehicle Motion Control: A Survey
Mar 25, 2021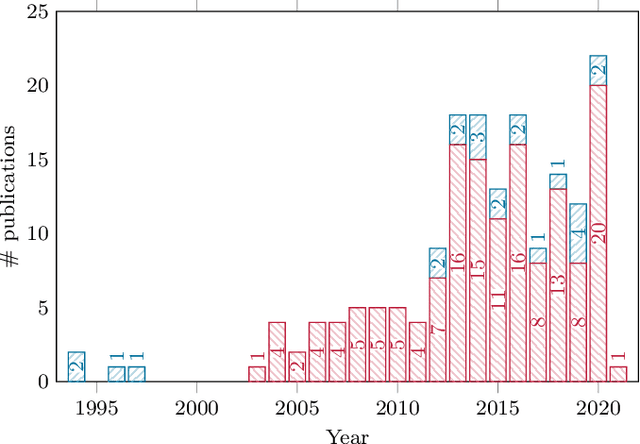
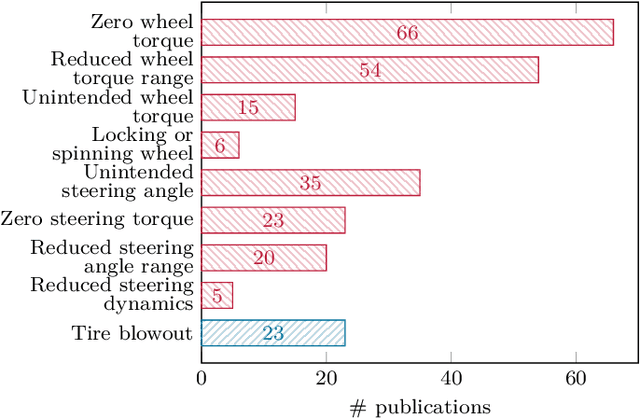
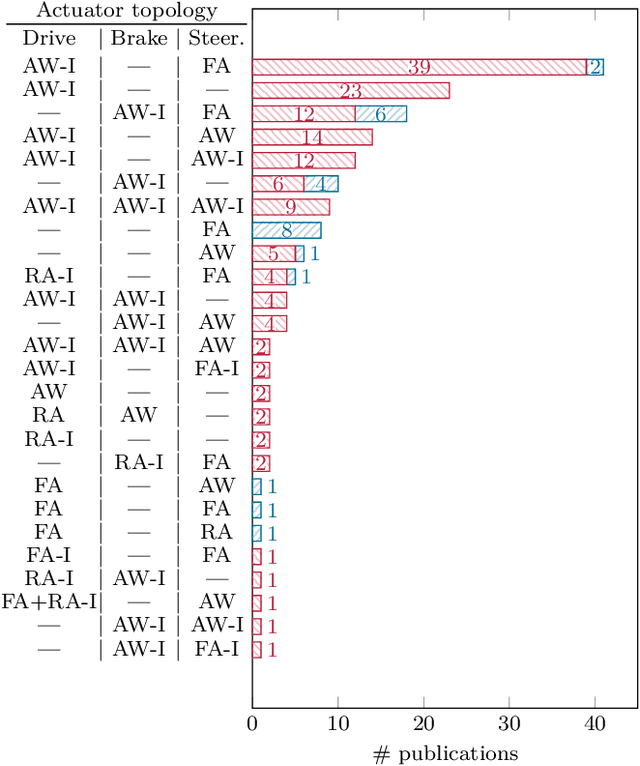
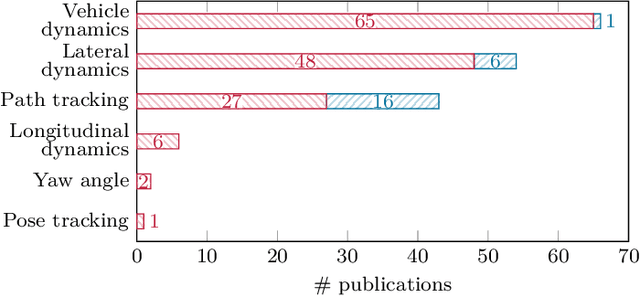
The advent of automated vehicles operating at SAE levels 4 and 5 poses high fault tolerance demands for all functions contributing to the driving task. At the actuator level, fault-tolerant vehicle motion control, which exploits functional redundancies among the actuators, is one means to achieve the required degree of fault tolerance. Therefore, we give a comprehensive overview of the state of the art in actuator fault-tolerant vehicle motion control with a focus on drive, brake, and steering degradations, as well as tire blowouts. This review shows that actuator fault-tolerant vehicle motion is a widely studied field; yet, the presented approaches differ with respect to many aspects. To provide a starting point for future research, we survey the employed actuator topologies, the tolerated degradations, the presented control approaches, as well as the experiments conducted for validation. Overall, and despite the large number of different approaches, the covered literature reveals the potential of increasing fault tolerance by fault-tolerant vehicle motion control. Thus, besides developing novel approaches or demonstrating real-time applicability, future research should aim at investigating limitations and enabling comparison of fault-tolerant motion control approaches in order to allow for a thorough safety argumentation.
Hazard Analysis and Risk Assessment for an Automated Unmanned Protective Vehicle
May 05, 2018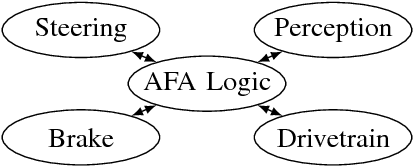
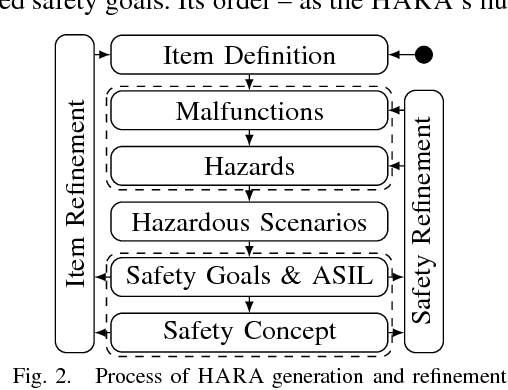

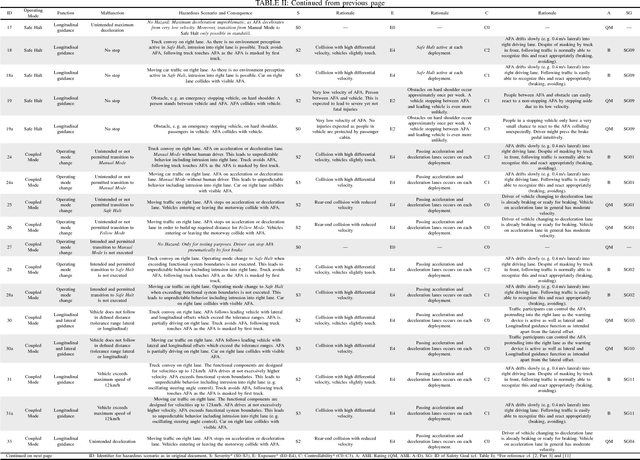
For future application of automated vehicles in public traffic, ensuring functional safety is essential. In this context, a hazard analysis and risk assessment is an important input for designing functionally vehicle automation systems. In this contribution, we present a detailed hazard analysis and risk assessment (HARA) according to the ISO 26262 standard for a specific Level 4 application, namely an unmanned protective vehicle operated without human supervision for motorway hard shoulder roadworks.