 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHamming Attention Distillation: Binarizing Keys and Queries for Efficient Long-Context Transformers
Feb 03, 2025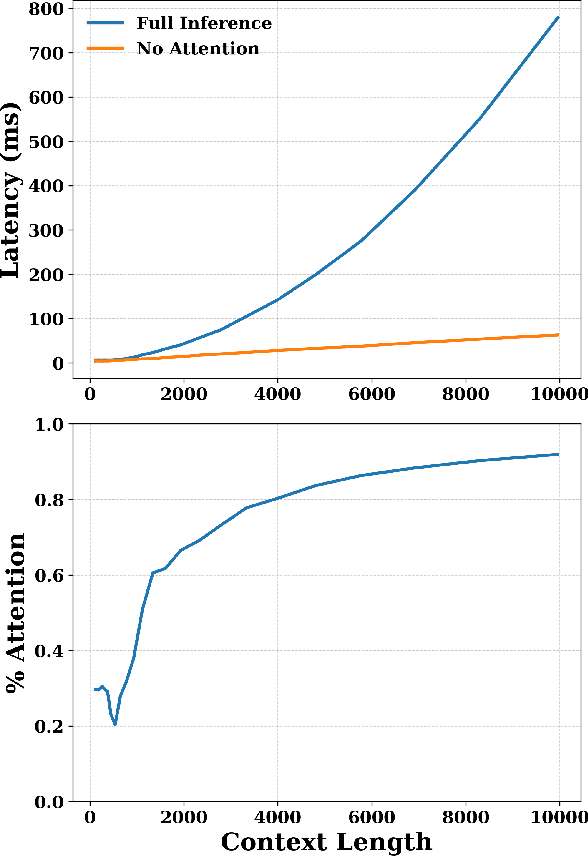
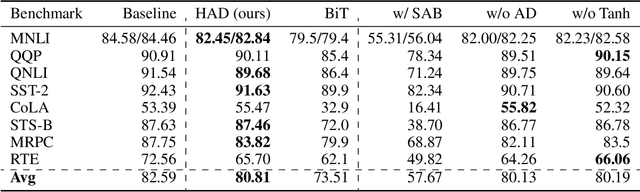
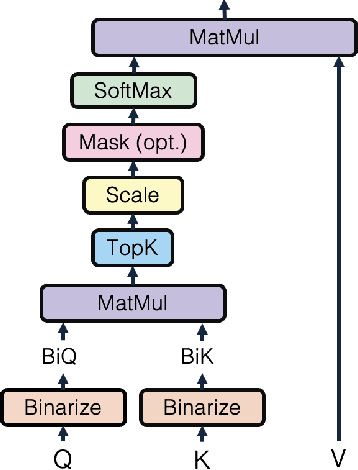
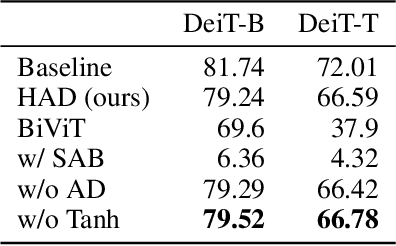
Pre-trained transformer models with extended context windows are notoriously expensive to run at scale, often limiting real-world deployment due to their high computational and memory requirements. In this paper, we introduce Hamming Attention Distillation (HAD), a novel framework that binarizes keys and queries in the attention mechanism to achieve significant efficiency gains. By converting keys and queries into {-1, +1} vectors and replacing dot-product operations with efficient Hamming distance computations, our method drastically reduces computational overhead. Additionally, we incorporate attention matrix sparsification to prune low-impact activations, which further reduces the cost of processing long-context sequences. \par Despite these aggressive compression strategies, our distilled approach preserves a high degree of representational power, leading to substantially improved accuracy compared to prior transformer binarization methods. We evaluate HAD on a range of tasks and models, including the GLUE benchmark, ImageNet, and QuALITY, demonstrating state-of-the-art performance among binarized Transformers while drastically reducing the computational costs of long-context inference. \par We implement HAD in custom hardware simulations, demonstrating superior performance characteristics compared to a custom hardware implementation of standard attention. HAD achieves just $\mathbf{1.78}\%$ performance losses on GLUE compared to $9.08\%$ in state-of-the-art binarization work, and $\mathbf{2.5}\%$ performance losses on ImageNet compared to $12.14\%$, all while targeting custom hardware with a $\mathbf{79}\%$ area reduction and $\mathbf{87}\%$ power reduction compared to its standard attention counterpart.
SAFER: Sharpness Aware layer-selective Finetuning for Enhanced Robustness in vision transformers
Jan 02, 2025



Vision transformers (ViTs) have become essential backbones in advanced computer vision applications and multi-modal foundation models. Despite their strengths, ViTs remain vulnerable to adversarial perturbations, comparable to or even exceeding the vulnerability of convolutional neural networks (CNNs). Furthermore, the large parameter count and complex architecture of ViTs make them particularly prone to adversarial overfitting, often compromising both clean and adversarial accuracy. This paper mitigates adversarial overfitting in ViTs through a novel, layer-selective fine-tuning approach: SAFER. Instead of optimizing the entire model, we identify and selectively fine-tune a small subset of layers most susceptible to overfitting, applying sharpness-aware minimization to these layers while freezing the rest of the model. Our method consistently enhances both clean and adversarial accuracy over baseline approaches. Typical improvements are around 5%, with some cases achieving gains as high as 20% across various ViT architectures and datasets.
Criticality Leveraged Adversarial Training (CLAT) for Boosted Performance via Parameter Efficiency
Aug 19, 2024



Adversarial training enhances neural network robustness but suffers from a tendency to overfit and increased generalization errors on clean data. This work introduces CLAT, an innovative approach that mitigates adversarial overfitting by introducing parameter efficiency into the adversarial training process, improving both clean accuracy and adversarial robustness. Instead of tuning the entire model, CLAT identifies and fine-tunes robustness-critical layers - those predominantly learning non-robust features - while freezing the remaining model to enhance robustness. It employs dynamic critical layer selection to adapt to changes in layer criticality throughout the fine-tuning process. Empirically, CLAT can be applied on top of existing adversarial training methods, significantly reduces the number of trainable parameters by approximately 95%, and achieves more than a 2% improvement in adversarial robustness compared to baseline methods.
On the use of Deep Autoencoders for Efficient Embedded Reinforcement Learning
Mar 25, 2019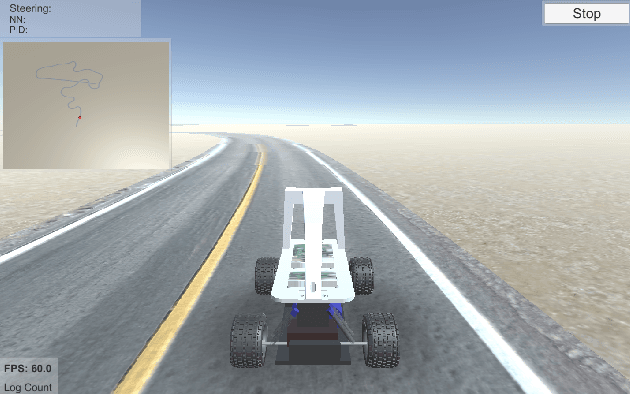
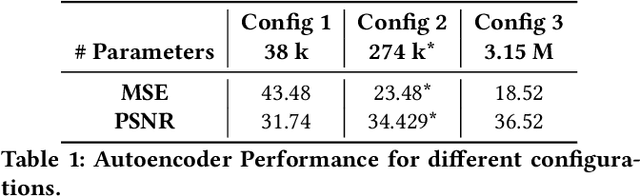
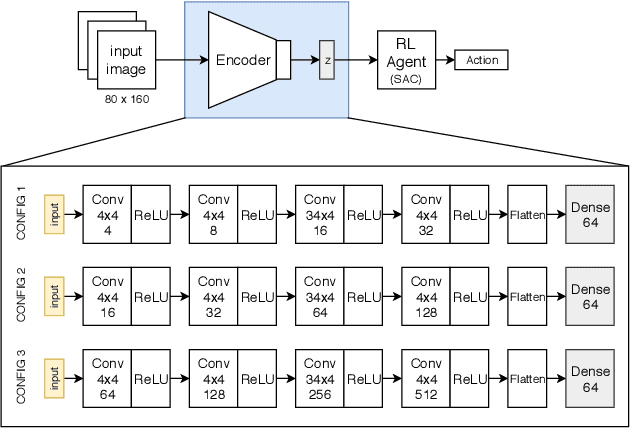
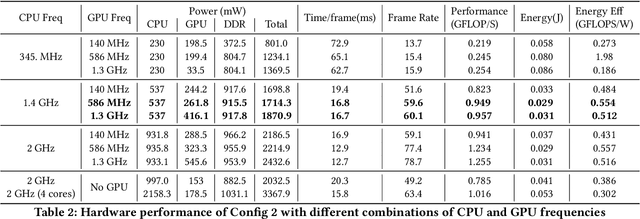
In autonomous embedded systems, it is often vital to reduce the amount of actions taken in the real world and energy required to learn a policy. Training reinforcement learning agents from high dimensional image representations can be very expensive and time consuming. Autoencoders are deep neural network used to compress high dimensional data such as pixelated images into small latent representations. This compression model is vital to efficiently learn policies, especially when learning on embedded systems. We have implemented this model on the NVIDIA Jetson TX2 embedded GPU, and evaluated the power consumption, throughput, and energy consumption of the autoencoders for various CPU/GPU core combinations, frequencies, and model parameters. Additionally, we have shown the reconstructions generated by the autoencoder to analyze the quality of the generated compressed representation and also the performance of the reinforcement learning agent. Finally, we have presented an assessment of the viability of training these models on embedded systems and their usefulness in developing autonomous policies. Using autoencoders, we were able to achieve 4-5 $\times$ improved performance compared to a baseline RL agent with a convolutional feature extractor, while using less than 2W of power.