 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBest-of-Q: Improving VLM agents with Q-function Action Ranking at Inference
Jan 30, 2026Vision-Language Models (VLMs) have become powerful backbones for agents to autonomously operate in digital environments like the web and operating systems. However, these models suffer from inadaptability to fast-changing environments like the web, which can be alleviated by fine-tuning requiring expansive model training and data collection. In this work, we introduce a novel paradigm for enhancing agentic VLM policies at inference without policy retraining. Fundamentally, our approach decouples the VLM's role as a high-capacity action proposer from the final action selection mechanism. We keep the VLM policy frozen and use it to generate a set of candidate actions for a given state. Then, a lightweight, offline-trained Q-function reranks these candidates, and the agent executes the action with the highest estimated value. The main contribution is to apply the Q-function directly during inference for immediate policy improvement, and not offline to relabel data for policy retraining. We demonstrate on the academic WebVoyager benchmark that our method significantly boosts agent success rates, improving a Qwen2.5-VL-7B agent from 38.8% to 55.7% and a proprietary GPT-4.1 agent from 82.4% to 88.8%.
Blending Data-Driven Priors in Dynamic Games
Feb 23, 2024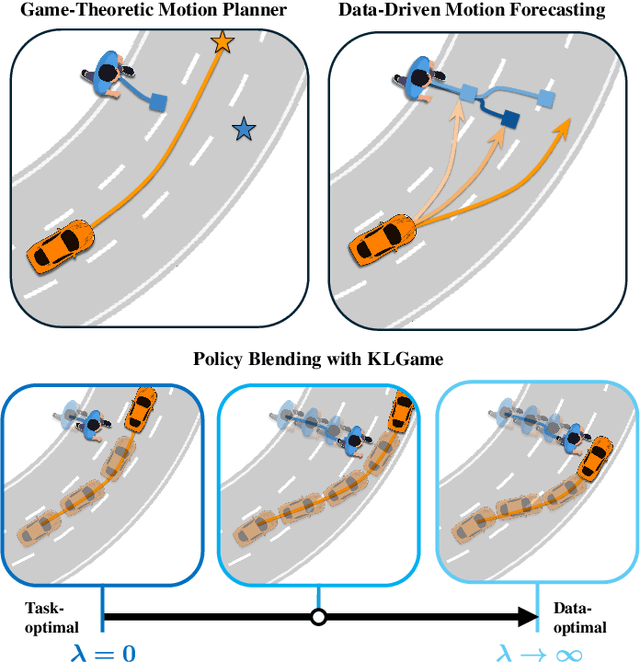
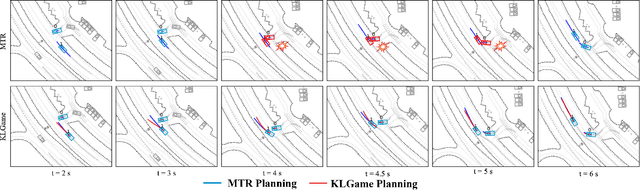
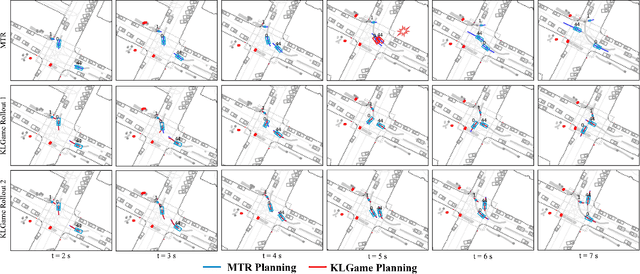
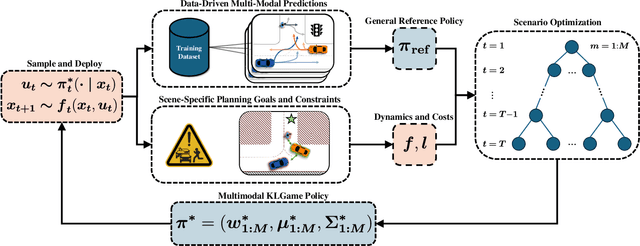
As intelligent robots like autonomous vehicles become increasingly deployed in the presence of people, the extent to which these systems should leverage model-based game-theoretic planners versus data-driven policies for safe, interaction-aware motion planning remains an open question. Existing dynamic game formulations assume all agents are task-driven and behave optimally. However, in reality, humans tend to deviate from the decisions prescribed by these models, and their behavior is better approximated under a noisy-rational paradigm. In this work, we investigate a principled methodology to blend a data-driven reference policy with an optimization-based game-theoretic policy. We formulate KLGame, a type of non-cooperative dynamic game with Kullback-Leibler (KL) regularization with respect to a general, stochastic, and possibly multi-modal reference policy. Our method incorporates, for each decision maker, a tunable parameter that permits modulation between task-driven and data-driven behaviors. We propose an efficient algorithm for computing multimodal approximate feedback Nash equilibrium strategies of KLGame in real time. Through a series of simulated and real-world autonomous driving scenarios, we demonstrate that KLGame policies can more effectively incorporate guidance from the reference policy and account for noisily-rational human behaviors versus non-regularized baselines.
Threshold Decision-Making Dynamics Adaptive to Physical Constraints and Changing Environment
Dec 11, 2023We propose a threshold decision-making framework for controlling the physical dynamics of an agent switching between two spatial tasks. Our framework couples a nonlinear opinion dynamics model that represents the evolution of an agent's preference for a particular task with the physical dynamics of the agent. We prove the bifurcation that governs the behavior of the coupled dynamics. We show by means of the bifurcation behavior how the coupled dynamics are adaptive to the physical constraints of the agent. We also show how the bifurcation can be modulated to allow the agent to switch tasks based on thresholds adaptive to environmental conditions. We illustrate the benefits of the approach through a decentralized multi-robot task allocation application for trash collection.
Beyond Jacobian-based tasks: Extended set-based tasks for multi-task execution and prioritization
Oct 24, 2023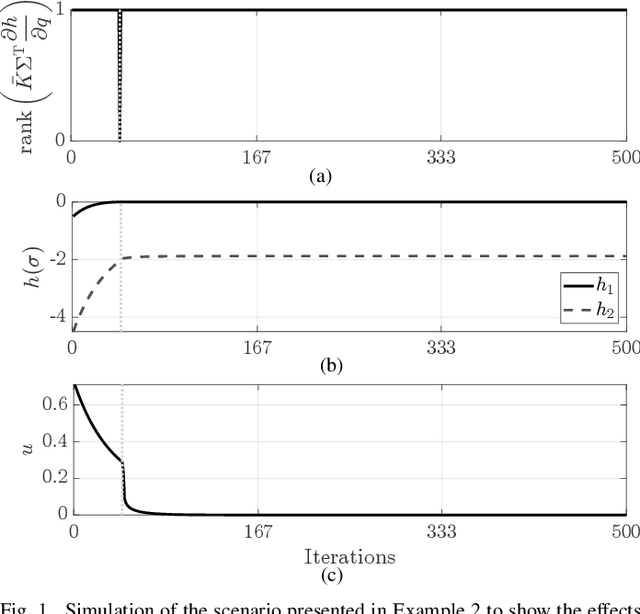
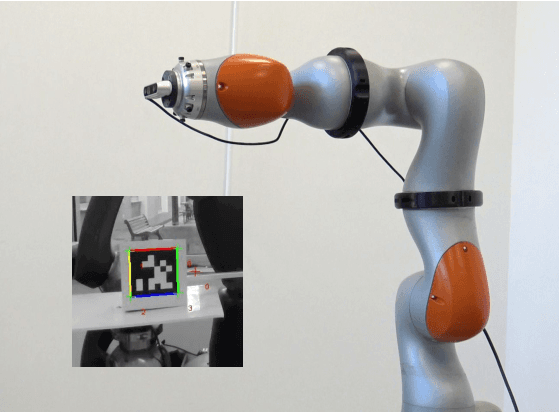
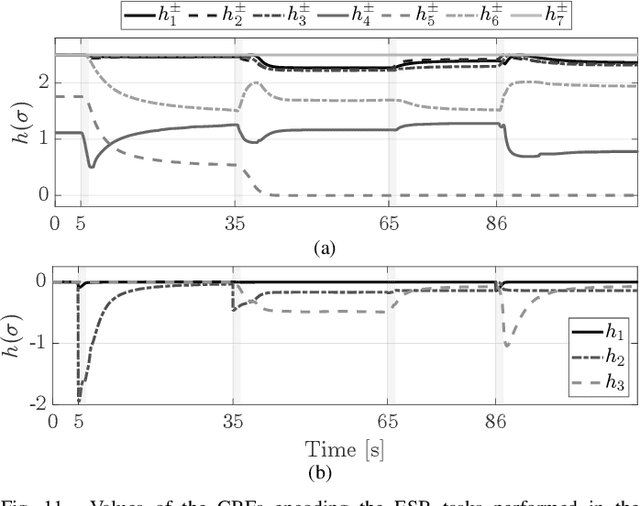
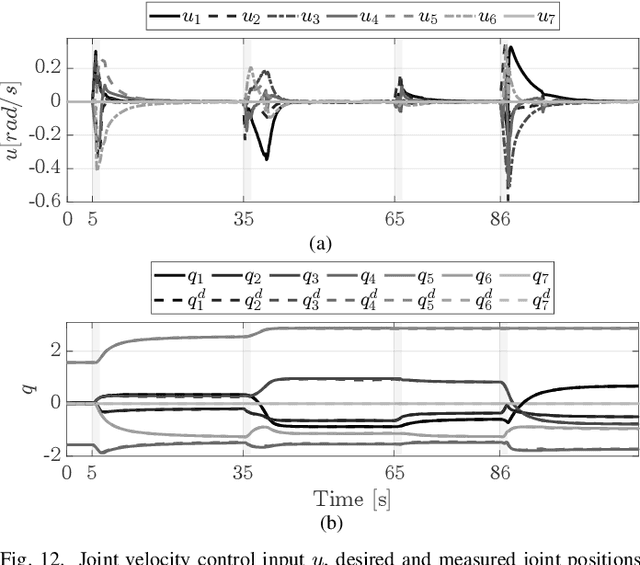
The ability of executing multiple tasks simultaneously is an important feature of redundant robotic systems. As a matter of fact, complex behaviors can often be obtained as a result of the execution of several tasks. Moreover, in safety-critical applications, tasks designed to ensure the safety of the robot and its surroundings have to be executed along with other nominal tasks. In such cases, it is also important to prioritize the former over the latter. In this paper, we formalize the definition of extended set-based tasks, i.e., tasks which can be executed by rendering subsets of the task space asymptotically stable or forward invariant. We propose a mathematical representation of such tasks that allows for the execution of more complex and time-varying prioritized stacks of tasks using kinematic and dynamic robot models alike. We present and analyze an optimization-based framework which is computationally efficient, accounts for input bounds, and allows for the stable execution of time-varying prioritized stacks of extended set-based tasks. The proposed framework is validated using extensive simulations and experiments with robotic manipulators.
Opinion-Driven Robot Navigation: Human-Robot Corridor Passing
Oct 04, 2022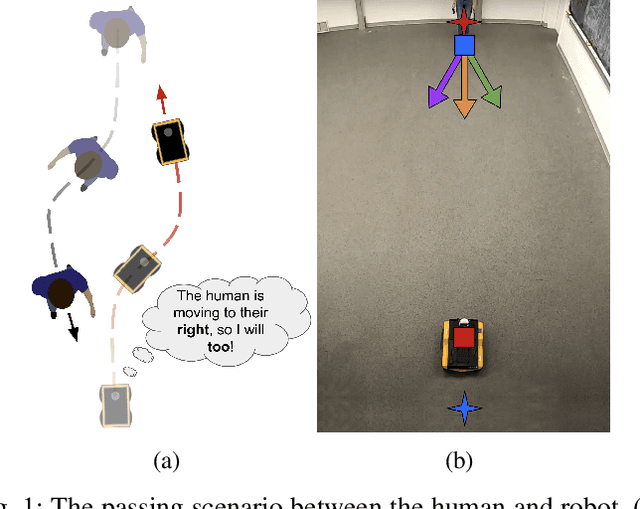
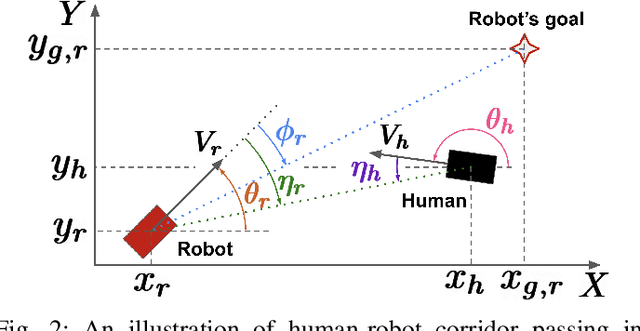

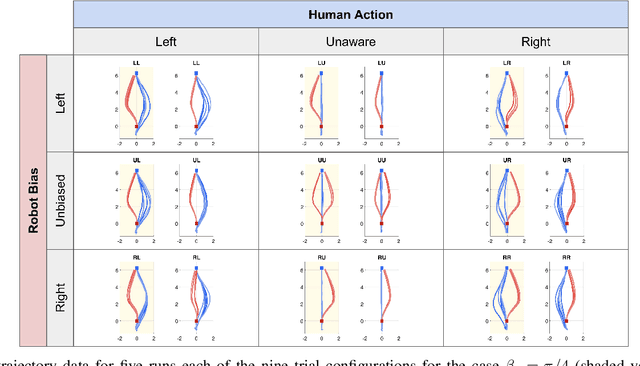
We propose, analyze, and experimentally verify a new approach for robot social navigation in human-robot corridor passing that is driven by nonlinear opinion dynamics. The robot forms an opinion over time in response to its observations, and its opinion drives its motion control. The algorithm inherits a key feature of the opinion dynamics: deadlock, also known as the "freezing robot" problem, is guaranteed to be broken even if the robot has no bias or evidence for whether it is better off passing on the right or the left. The robot can also overcome a bias that is in conflict with the passage choice the human makes. The approach enables rapid and reliable opinion formation, which makes for rapid and reliable navigation. We verify our analytical results on deadlock breaking and rapid and reliable passage with human-robot experiments. We further verify through experiments that a single design parameter can tune the trade-off between efficiency and reliability in human-robot corridor passing. The new approach has the additional advantage that it does not rely on a predictive model of human behavior.
Decentralized Learning With Limited Communications for Multi-robot Coverage of Unknown Spatial Fields
Aug 03, 2022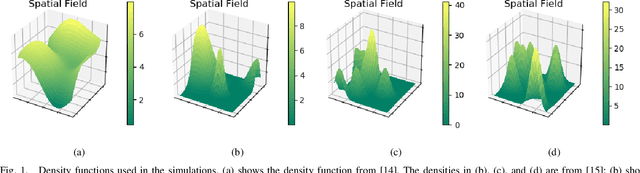

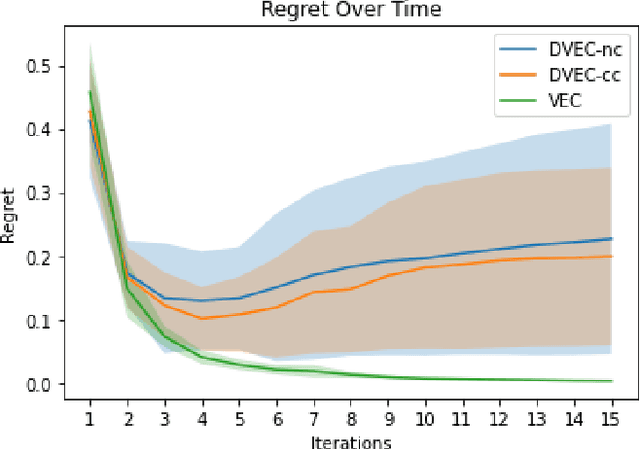
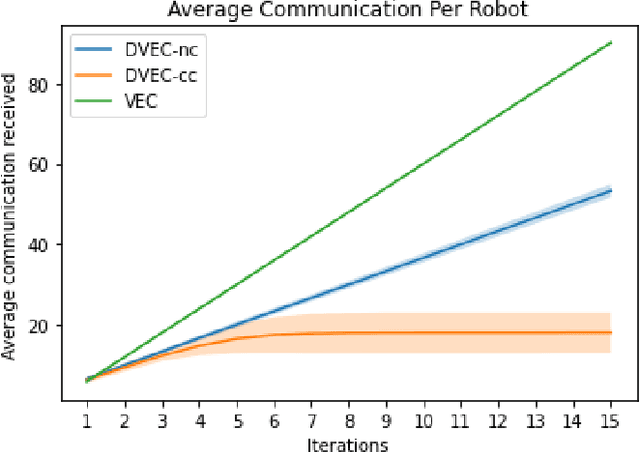
This paper presents an algorithm for a team of mobile robots to simultaneously learn a spatial field over a domain and spatially distribute themselves to optimally cover it. Drawing from previous approaches that estimate the spatial field through a centralized Gaussian process, this work leverages the spatial structure of the coverage problem and presents a decentralized strategy where samples are aggregated locally by establishing communications through the boundaries of a Voronoi partition. We present an algorithm whereby each robot runs a local Gaussian process calculated from its own measurements and those provided by its Voronoi neighbors, which are incorporated into the individual robot's Gaussian process only if they provide sufficiently novel information. The performance of the algorithm is evaluated in simulation and compared with centralized approaches.
From Motions to Emotions: Can the Fundamental Emotions be Expressed in a Robot Swarm?
Mar 28, 2019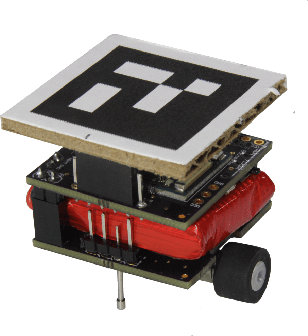


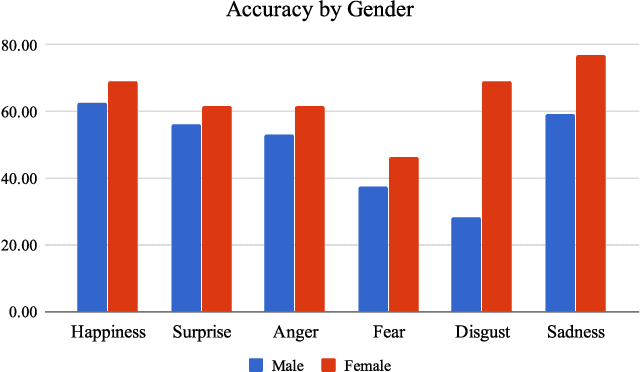
This paper explores the expressive capabilities of a swarm of miniature mobile robots within the context of inter-robot interactions and their mapping to the so-called fundamental emotions. In particular, we investigate how motion and shape descriptors that are psychologically associated with different emotions can be incorporated into different swarm behaviors for the purpose of artistic expositions. Based on these characterizations from social psychology, a set of swarm behaviors is created, where each behavior corresponds to a fundamental emotion. The effectiveness of these behaviors was evaluated in a survey in which the participants were asked to associate different swarm behaviors with the fundamental emotions. The results of the survey show that most of the research participants assigned to each video the emotion intended to be portrayed by design. These results confirm that abstract descriptors associated with the different fundamental emotions in social psychology provide useful motion characterizations that can be effectively transformed into expressive behaviors for a swarm of simple ground mobile robots.