 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWaves and symbols in neuromorphic hardware: from analog signal processing to digital computing on the same computational substrate
Feb 27, 2025Neural systems use the same underlying computational substrate to carry out analog filtering and signal processing operations, as well as discrete symbol manipulation and digital computation. Inspired by the computational principles of canonical cortical microcircuits, we propose a framework for using recurrent spiking neural networks to seamlessly and robustly switch between analog signal processing and categorical and discrete computation. We provide theoretical analysis and practical neural network design tools to formally determine the conditions for inducing this switch. We demonstrate the robustness of this framework experimentally with hardware soft Winner-Take-All and mixed-feedback recurrent spiking neural networks, implemented by appropriately configuring the analog neuron and synapse circuits of a mixed-signal neuromorphic processor chip.
Excitable crawling
May 31, 2024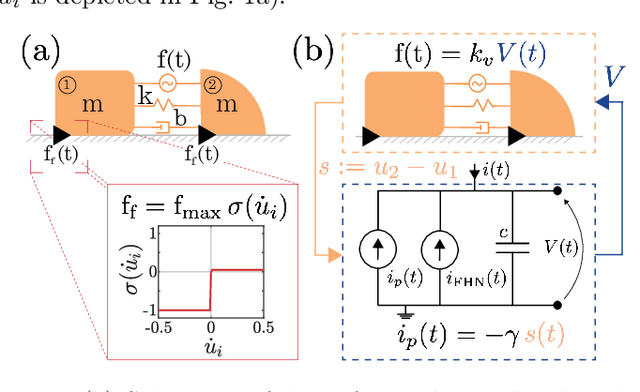
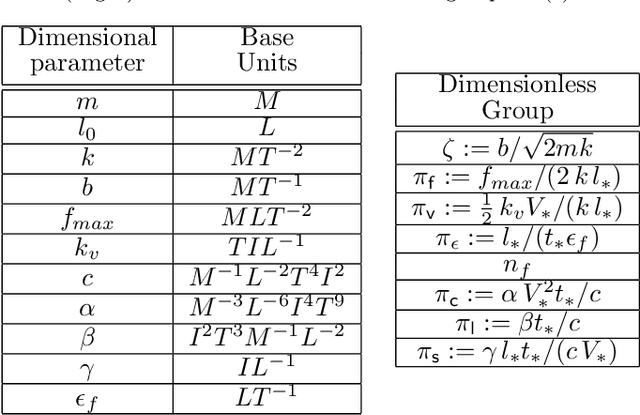
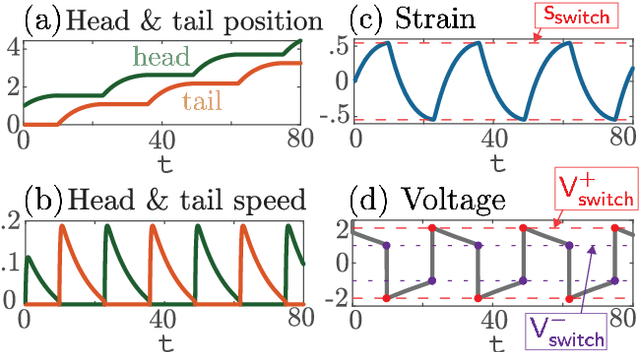
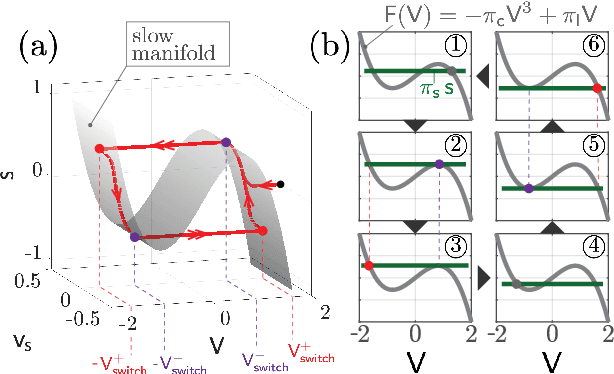
We propose and analyze the suitability of a spiking controller to engineer the locomotion of a soft robotic crawler. Inspired by the FitzHugh-Nagumo model of neural excitability, we design a bistable controller with an electrical flipflop circuit representation capable of generating spikes on-demand when coupled to the passive crawler mechanics. A proprioceptive sensory signal from the crawler mechanics turns bistability of the controller into a rhythmic spiking. The output voltage, in turn, activates the crawler's actuators to generate movement through peristaltic waves. We show through geometric analysis that this control strategy achieves endogenous crawling. The electro-mechanical sensorimotor interconnection provides embodied negative feedback regulation, facilitating locomotion. Dimensional analysis provides insights on the characteristic scales in the crawler's mechanical and electrical dynamics, and how they determine the crawling gait. Adaptive control of the electrical scales to optimally match the mechanical scales can be envisioned to achieve further efficiency, as in homeostatic regulation of neuronal circuits. Our approach can scale up to multiple sensorimotor loops inspired by biological central pattern generators.
Threshold Decision-Making Dynamics Adaptive to Physical Constraints and Changing Environment
Dec 11, 2023



We propose a threshold decision-making framework for controlling the physical dynamics of an agent switching between two spatial tasks. Our framework couples a nonlinear opinion dynamics model that represents the evolution of an agent's preference for a particular task with the physical dynamics of the agent. We prove the bifurcation that governs the behavior of the coupled dynamics. We show by means of the bifurcation behavior how the coupled dynamics are adaptive to the physical constraints of the agent. We also show how the bifurcation can be modulated to allow the agent to switch tasks based on thresholds adaptive to environmental conditions. We illustrate the benefits of the approach through a decentralized multi-robot task allocation application for trash collection.