 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlipItRight: Stable Pose-Targeted Throw-Flip Across Diverse Objects
Jun 01, 2026We propose FlipItRight, a framework for stable planar pose-targeted throw-flip with a high-DoF manipulator. The task is decomposed into an object-level planner, which generates candidate release states satisfying the desired landing pose, and a robot-level planner, which evaluates executability and constructs a feasible swing motion. Treating the release state as an explicit intermediate representation enables principled candidate filtering, adaptive selection of release and pre-swing configurations, and structured near-release motion design -- in particular, approximately constant end-effector velocities during the final swing phase to improve robustness to release-timing uncertainty. We validate on a real platform across objects of varying shape, size, and mass, achieving a 90% success rate across 120 trials. Ablation studies confirm that each design choice contributes to throwing performance, and the framework requires no prior data or learned model, enabling direct deployment on new objects and targets without environment-specific calibration or data collection.
UMLoc: Uncertainty-Aware Map-Constrained Inertial Localization with Quantified Bounds
Jan 10, 2026Inertial localization is particularly valuable in GPS-denied environments such as indoors. However, localization using only Inertial Measurement Units (IMUs) suffers from drift caused by motion-process noise and sensor biases. This paper introduces Uncertainty-aware Map-constrained Inertial Localization (UMLoc), an end-to-end framework that jointly models IMU uncertainty and map constraints to achieve drift-resilient positioning. UMLoc integrates two coupled modules: (1) a Long Short-Term Memory (LSTM) quantile regressor, which estimates the specific quantiles needed to define 68%, 90%, and 95% prediction intervals serving as a measure of localization uncertainty and (2) a Conditioned Generative Adversarial Network (CGAN) with cross-attention that fuses IMU dynamic data with distance-based floor-plan maps to generate geometrically feasible trajectories. The modules are trained jointly, allowing uncertainty estimates to propagate through the CGAN during trajectory generation. UMLoc was evaluated on three datasets, including a newly collected 2-hour indoor benchmark with time-aligned IMU data, ground-truth poses and floor-plan maps. Results show that the method achieves a mean drift ratio of 5.9% over a 70 m travel distance and an average Absolute Trajectory Error (ATE) of 1.36 m, while maintaining calibrated prediction bounds.
On the Stabilization of Rigid Formations on Regular Curves
Dec 11, 2025This work deals with the problem of stabilizing a multi-agent rigid formation on a general class of planar curves. Namely, we seek to stabilize an equilateral polygonal formation on closed planar differentiable curves after a path sweep. The task of finding an inscribed regular polygon centered at the point of interest is solved via a randomized multi-start Newton-Like algorithm for which one is able to ascertain the existence of a minimizer. Then we design a continuous feedback law that guarantees convergence to, and sufficient sweeping of the curve, followed by convergence to the desired formation vertices while ensuring inter-agent avoidance. The proposed approach is validated through numerical simulations for different classes of curves and different rigid formations. Code: https://github.com/mebbaid/paper-elobaid-ifacwc-2026
Toward Accurate Long-Horizon Robotic Manipulation: Language-to-Action with Foundation Models via Scene Graphs
Oct 31, 2025



This paper presents a framework that leverages pre-trained foundation models for robotic manipulation without domain-specific training. The framework integrates off-the-shelf models, combining multimodal perception from foundation models with a general-purpose reasoning model capable of robust task sequencing. Scene graphs, dynamically maintained within the framework, provide spatial awareness and enable consistent reasoning about the environment. The framework is evaluated through a series of tabletop robotic manipulation experiments, and the results highlight its potential for building robotic manipulation systems directly on top of off-the-shelf foundation models.
Cooperative Grasping for Collective Object Transport in Constrained Environments
Sep 03, 2025



We propose a novel framework for decision-making in cooperative grasping for two-robot object transport in constrained environments. The core of the framework is a Conditional Embedding (CE) model consisting of two neural networks that map grasp configuration information into an embedding space. The resulting embedding vectors are then used to identify feasible grasp configurations that allow two robots to collaboratively transport an object. To ensure generalizability across diverse environments and object geometries, the neural networks are trained on a dataset comprising a range of environment maps and object shapes. We employ a supervised learning approach with negative sampling to ensure that the learned embeddings effectively distinguish between feasible and infeasible grasp configurations. Evaluation results across a wide range of environments and objects in simulations demonstrate the model's ability to reliably identify feasible grasp configurations. We further validate the framework through experiments on a physical robotic platform, confirming its practical applicability.
Opinion-Driven Decision-Making for Multi-Robot Navigation through Narrow Corridors
Apr 29, 2025



We propose an opinion-driven navigation framework for multi-robot traversal through a narrow corridor. Our approach leverages a multi-agent decision-making model known as the Nonlinear Opinion Dynamics (NOD) to address the narrow corridor passage problem, formulated as a multi-robot navigation game. By integrating the NOD model with a multi-robot path planning algorithm, we demonstrate that the framework effectively reduces the likelihood of deadlocks during corridor traversal. To ensure scalability with an increasing number of robots, we introduce a game reduction technique that enables efficient coordination in larger groups. Extensive simulation studies are conducted to validate the effectiveness of the proposed approach.
Learning Policies for Dynamic Coalition Formation in Multi-Robot Task Allocation
Dec 29, 2024We propose a decentralized, learning-based framework for dynamic coalition formation in Multi-Robot Task Allocation (MRTA). Our approach extends Multi-Agent Proximal Policy Optimization (MAPPO) by incorporating spatial action maps, robot motion control, task allocation revision, and intention sharing to enable effective coalition formation. Extensive simulations demonstrate that our model significantly outperforms existing methods, including a market-based baseline. Furthermore, we assess the scalability and generalizability of the proposed framework, highlighting its ability to handle large robot populations and adapt to diverse task allocation environments.
TAB-Fields: A Maximum Entropy Framework for Mission-Aware Adversarial Planning
Dec 03, 2024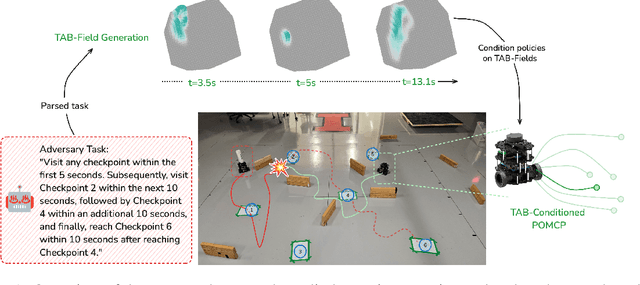
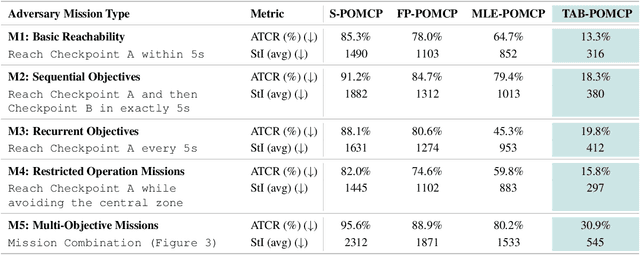
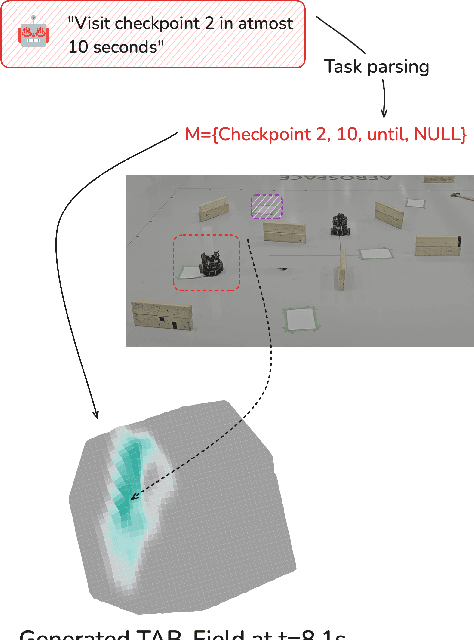
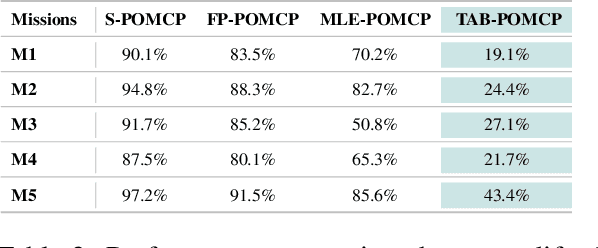
Autonomous agents operating in adversarial scenarios face a fundamental challenge: while they may know their adversaries' high-level objectives, such as reaching specific destinations within time constraints, the exact policies these adversaries will employ remain unknown. Traditional approaches address this challenge by treating the adversary's state as a partially observable element, leading to a formulation as a Partially Observable Markov Decision Process (POMDP). However, the induced belief-space dynamics in a POMDP require knowledge of the system's transition dynamics, which, in this case, depend on the adversary's unknown policy. Our key observation is that while an adversary's exact policy is unknown, their behavior is necessarily constrained by their mission objectives and the physical environment, allowing us to characterize the space of possible behaviors without assuming specific policies. In this paper, we develop Task-Aware Behavior Fields (TAB-Fields), a representation that captures adversary state distributions over time by computing the most unbiased probability distribution consistent with known constraints. We construct TAB-Fields by solving a constrained optimization problem that minimizes additional assumptions about adversary behavior beyond mission and environmental requirements. We integrate TAB-Fields with standard planning algorithms by introducing TAB-conditioned POMCP, an adaptation of Partially Observable Monte Carlo Planning. Through experiments in simulation with underwater robots and hardware implementations with ground robots, we demonstrate that our approach achieves superior performance compared to baselines that either assume specific adversary policies or neglect mission constraints altogether. Evaluation videos and code are available at https://tab-fields.github.io.
Integrating Disambiguation and User Preferences into Large Language Models for Robot Motion Planning
Apr 22, 2024



This paper presents a framework that can interpret humans' navigation commands containing temporal elements and directly translate their natural language instructions into robot motion planning. Central to our framework is utilizing Large Language Models (LLMs). To enhance the reliability of LLMs in the framework and improve user experience, we propose methods to resolve the ambiguity in natural language instructions and capture user preferences. The process begins with an ambiguity classifier, identifying potential uncertainties in the instructions. Ambiguous statements trigger a GPT-4-based mechanism that generates clarifying questions, incorporating user responses for disambiguation. Also, the framework assesses and records user preferences for non-ambiguous instructions, enhancing future interactions. The last part of this process is the translation of disambiguated instructions into a robot motion plan using Linear Temporal Logic. This paper details the development of this framework and the evaluation of its performance in various test scenarios.
Threshold Decision-Making Dynamics Adaptive to Physical Constraints and Changing Environment
Dec 11, 2023



We propose a threshold decision-making framework for controlling the physical dynamics of an agent switching between two spatial tasks. Our framework couples a nonlinear opinion dynamics model that represents the evolution of an agent's preference for a particular task with the physical dynamics of the agent. We prove the bifurcation that governs the behavior of the coupled dynamics. We show by means of the bifurcation behavior how the coupled dynamics are adaptive to the physical constraints of the agent. We also show how the bifurcation can be modulated to allow the agent to switch tasks based on thresholds adaptive to environmental conditions. We illustrate the benefits of the approach through a decentralized multi-robot task allocation application for trash collection.