 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAB-Fields: A Maximum Entropy Framework for Mission-Aware Adversarial Planning
Dec 03, 2024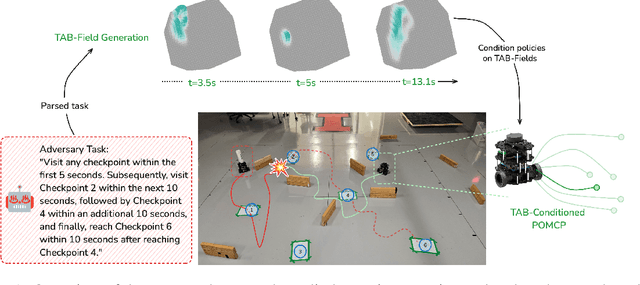
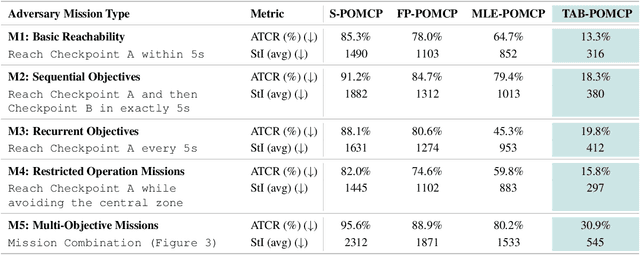
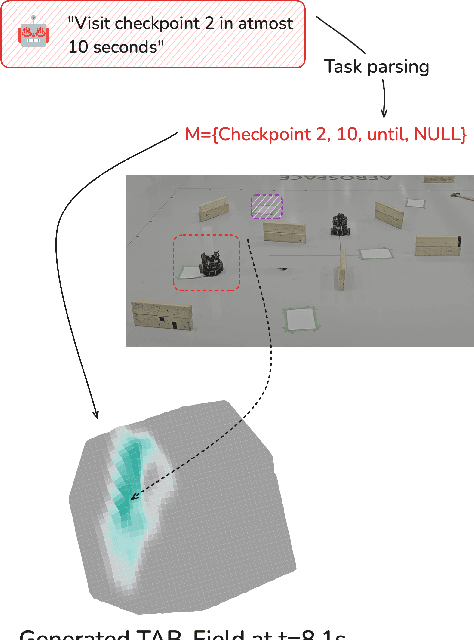
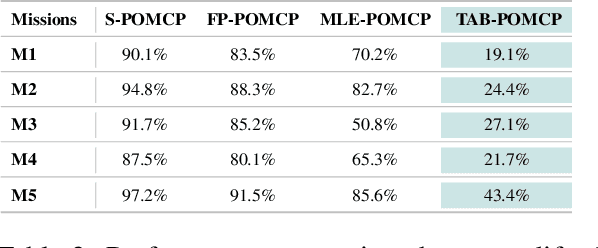
Autonomous agents operating in adversarial scenarios face a fundamental challenge: while they may know their adversaries' high-level objectives, such as reaching specific destinations within time constraints, the exact policies these adversaries will employ remain unknown. Traditional approaches address this challenge by treating the adversary's state as a partially observable element, leading to a formulation as a Partially Observable Markov Decision Process (POMDP). However, the induced belief-space dynamics in a POMDP require knowledge of the system's transition dynamics, which, in this case, depend on the adversary's unknown policy. Our key observation is that while an adversary's exact policy is unknown, their behavior is necessarily constrained by their mission objectives and the physical environment, allowing us to characterize the space of possible behaviors without assuming specific policies. In this paper, we develop Task-Aware Behavior Fields (TAB-Fields), a representation that captures adversary state distributions over time by computing the most unbiased probability distribution consistent with known constraints. We construct TAB-Fields by solving a constrained optimization problem that minimizes additional assumptions about adversary behavior beyond mission and environmental requirements. We integrate TAB-Fields with standard planning algorithms by introducing TAB-conditioned POMCP, an adaptation of Partially Observable Monte Carlo Planning. Through experiments in simulation with underwater robots and hardware implementations with ground robots, we demonstrate that our approach achieves superior performance compared to baselines that either assume specific adversary policies or neglect mission constraints altogether. Evaluation videos and code are available at https://tab-fields.github.io.