 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangled Control of Multi-Agent Systems
Nov 08, 2025This paper develops a general framework for multi-agent control synthesis, which applies to a wide range of problems with convergence guarantees, regardless of the complexity of the underlying graph topology and the explicit time dependence of the objective function. The proposed framework systematically addresses a particularly challenging problem in multi-agent systems, i.e., decentralization of entangled dynamics among different agents, and it naturally supports multi-objective robotics and real-time implementations. To demonstrate its generality and effectiveness, the framework is implemented across three experiments, namely time-varying leader-follower formation control, decentralized coverage control for time-varying density functions without any approximations, which is a long-standing open problem, and safe formation navigation in dense environments.
Value Iteration for Learning Concurrently Executable Robotic Control Tasks
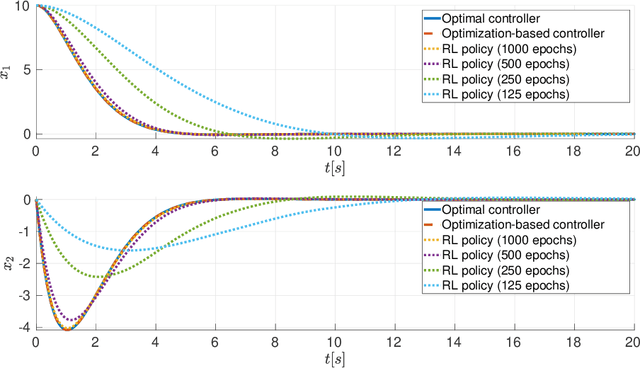
Apr 01, 2025Many modern robotic systems such as multi-robot systems and manipulators exhibit redundancy, a property owing to which they are capable of executing multiple tasks. This work proposes a novel method, based on the Reinforcement Learning (RL) paradigm, to train redundant robots to be able to execute multiple tasks concurrently. Our approach differs from typical multi-objective RL methods insofar as the learned tasks can be combined and executed in possibly time-varying prioritized stacks. We do so by first defining a notion of task independence between learned value functions. We then use our definition of task independence to propose a cost functional that encourages a policy, based on an approximated value function, to accomplish its control objective while minimally interfering with the execution of higher priority tasks. This allows us to train a set of control policies that can be executed simultaneously. We also introduce a version of fitted value iteration to learn to approximate our proposed cost functional efficiently. We demonstrate our approach on several scenarios and robotic systems.
Energy-Aware Task Allocation for Teams of Multi-mode Robots
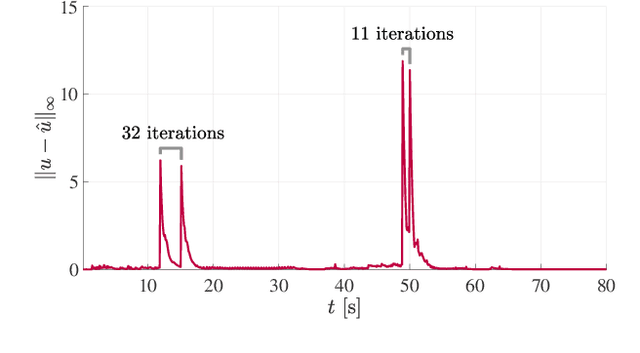
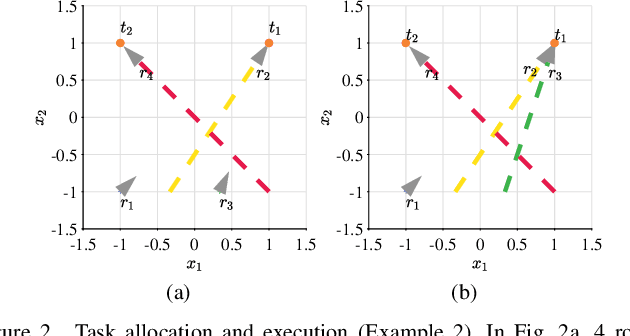
Mar 17, 2025This work proposes a novel multi-robot task allocation framework for robots that can switch between multiple modes, e.g., flying, driving, or walking. We first provide a method to encode the multi-mode property of robots as a graph, where the mode of each robot is represented by a node. Next, we formulate a constrained optimization problem to decide both the task to be allocated to each robot as well as the mode in which the latter should execute the task. The robot modes are optimized based on the state of the robot and the environment, as well as the energy required to execute the allocated task. Moreover, the proposed framework is able to encompass kinematic and dynamic models of robots alike. Furthermore, we provide sufficient conditions for the convergence of task execution and allocation for both robot models.
Reactive Robot Navigation Using Quasi-conformal Mappings and Control Barrier Functions
Nov 22, 2024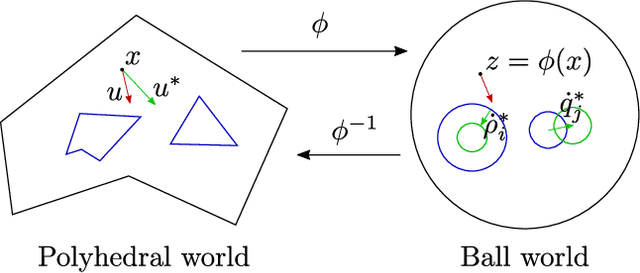
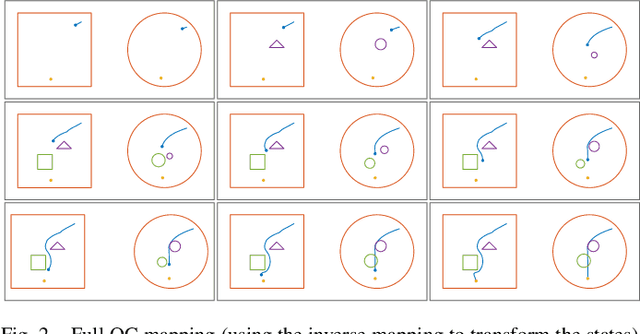
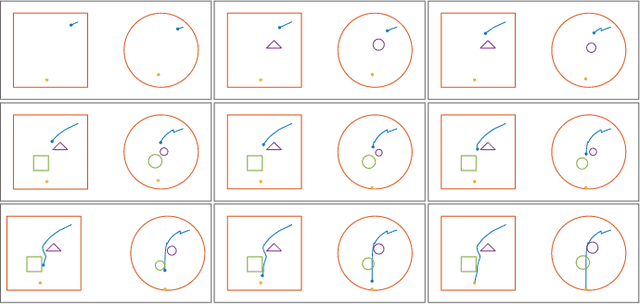
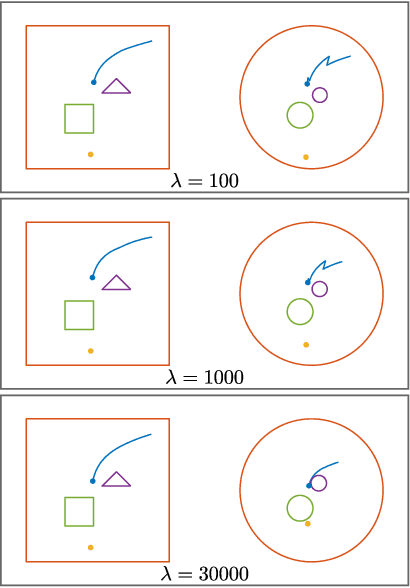
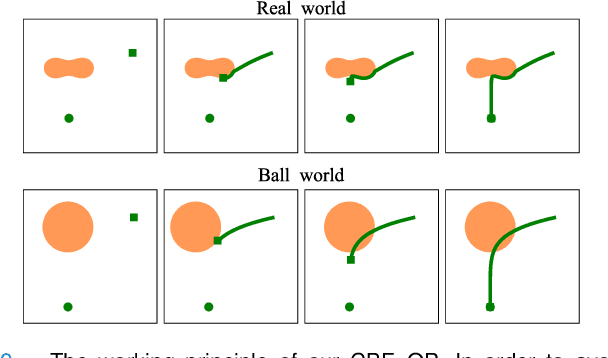
This paper presents a robot control algorithm suitable for safe reactive navigation tasks in cluttered environments. The proposed approach consists of transforming the robot workspace into the \emph{ball world}, an artificial representation where all obstacle regions are closed balls. Starting from a polyhedral representation of obstacles in the environment, obtained using exteroceptive sensor readings, a computationally efficient mapping to ball-shaped obstacles is constructed using quasi-conformal mappings and M\"obius transformations. The geometry of the ball world is amenable to provably safe navigation tasks achieved via control barrier functions employed to ensure collision-free robot motions with guarantees both on safety and on the absence of deadlocks. The performance of the proposed navigation algorithm is showcased and analyzed via extensive simulations and experiments performed using different types of robotic systems, including manipulators and mobile robots.
Beyond Jacobian-based tasks: Extended set-based tasks for multi-task execution and prioritization
Oct 24, 2023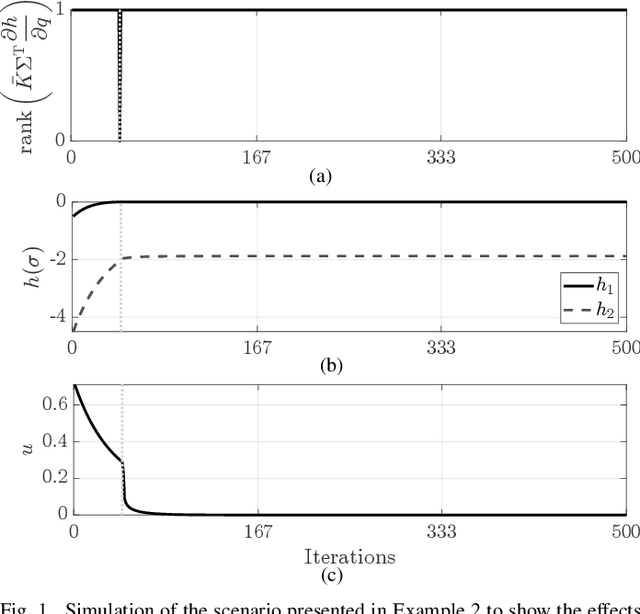
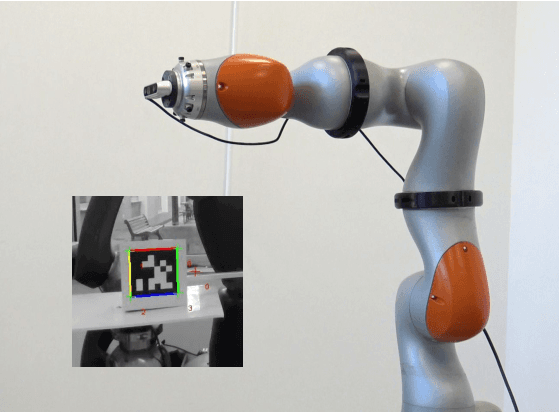
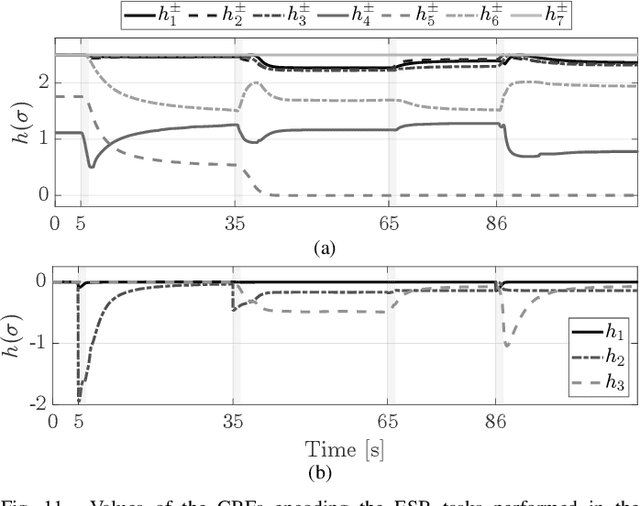
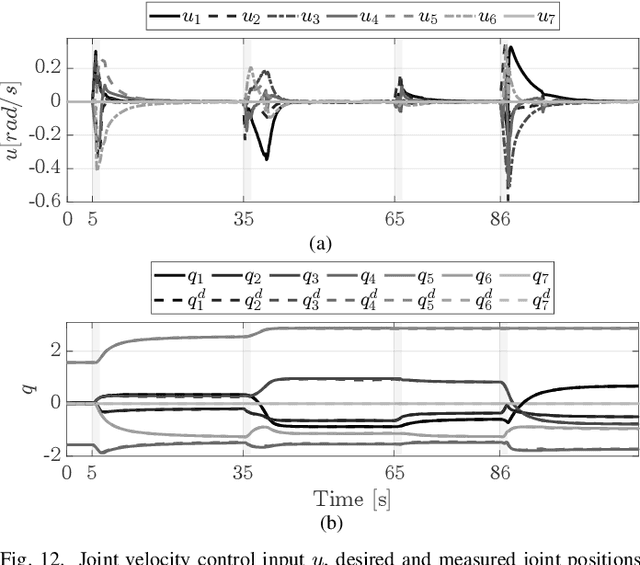
The ability of executing multiple tasks simultaneously is an important feature of redundant robotic systems. As a matter of fact, complex behaviors can often be obtained as a result of the execution of several tasks. Moreover, in safety-critical applications, tasks designed to ensure the safety of the robot and its surroundings have to be executed along with other nominal tasks. In such cases, it is also important to prioritize the former over the latter. In this paper, we formalize the definition of extended set-based tasks, i.e., tasks which can be executed by rendering subsets of the task space asymptotically stable or forward invariant. We propose a mathematical representation of such tasks that allows for the execution of more complex and time-varying prioritized stacks of tasks using kinematic and dynamic robot models alike. We present and analyze an optimization-based framework which is computationally efficient, accounts for input bounds, and allows for the stable execution of time-varying prioritized stacks of extended set-based tasks. The proposed framework is validated using extensive simulations and experiments with robotic manipulators.
A Constrained-Optimization Approach to the Execution of Prioritized Stacks of Learned Multi-Robot Tasks
Jan 13, 2023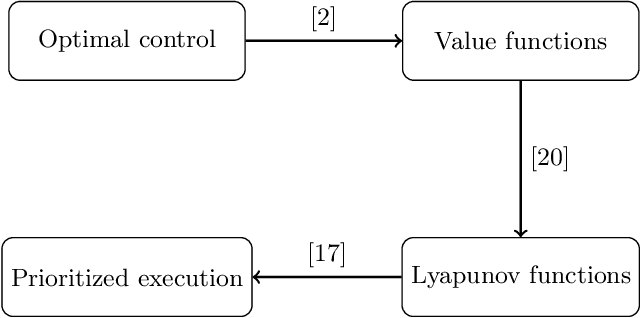

This paper presents a constrained-optimization formulation for the prioritized execution of learned robot tasks. The framework lends itself to the execution of tasks encoded by value functions, such as tasks learned using the reinforcement learning paradigm. The tasks are encoded as constraints of a convex optimization program by using control Lyapunov functions. Moreover, an additional constraint is enforced in order to specify relative priorities between the tasks. The proposed approach is showcased in simulation using a team of mobile robots executing coordinated multi-robot tasks.
What Can Robots Teach Us About The COVID-19 Pandemic? Interactive Demonstrations of Epidemiological Models Using a Swarm of Brushbots
Jun 15, 2022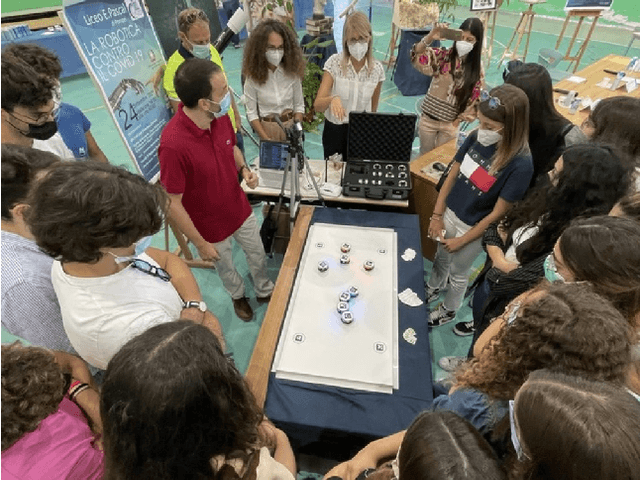
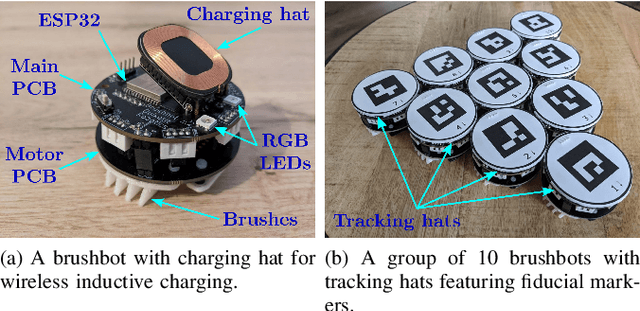
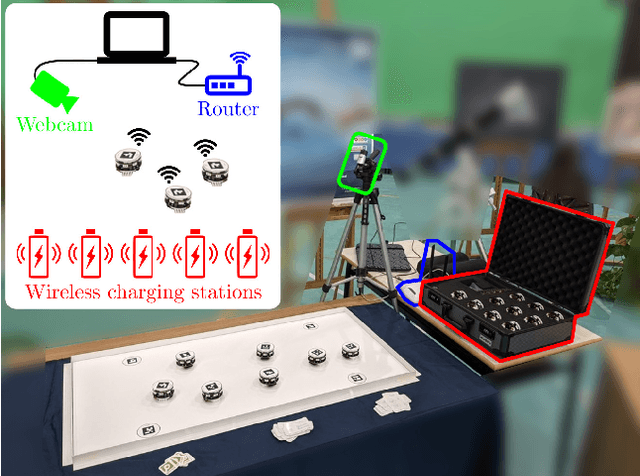
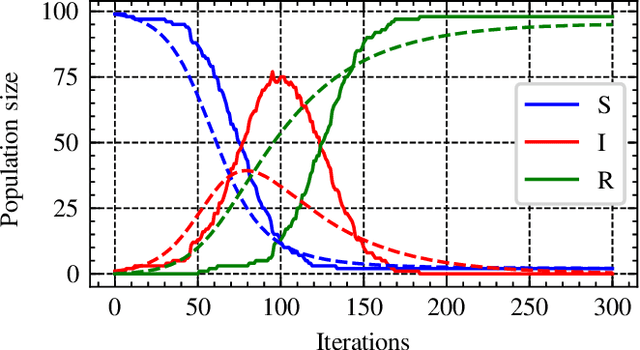
This paper describes the methodology and outcomes of a series of educational events conducted in 2021 which leveraged robot swarms to educate high-school and university students about epidemiological models and how they can inform societal and governmental policies. With a specific focus on the COVID-19 pandemic, the events consisted of 4 online and 3 in-person workshops where students had the chance to interact with a swarm of 20 custom-built brushbots -- small-scale vibration-driven robots optimized for portability and robustness. Through the analysis of data collected during a post-event survey, this paper shows how the events positively impacted the students' views on the scientific method to guide real-world decision making, as well as their interest in robotics.
Resilience and Energy-Awareness in Constraint-Driven-Controlled Multi-Robot Systems
Jun 15, 2022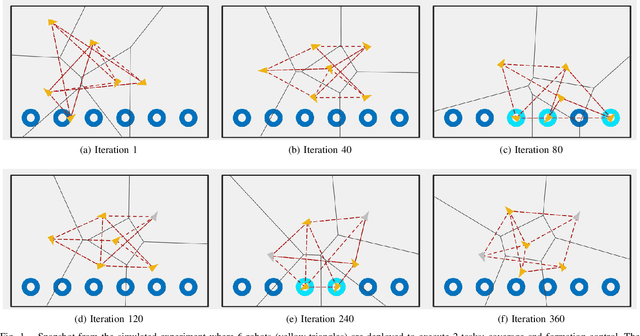



In the context of constraint-driven control of multi-robot systems, in this paper, we propose an optimization-based framework that is able to ensure resilience and energy-awareness of teams of robots. The approach is based on a novel, frame-theoretic, measure of resilience which allows us to analyze and enforce resilient behaviors of multi-robot systems. The properties of resilience and energy-awareness are encoded as constraints of a convex optimization program which is used to synthesize the robot control inputs. This allows for the combination of such properties with the execution of coordinated tasks to achieve resilient and energy-aware robot operations. The effectiveness of the proposed method is illustrated in a simulated scenario where a team of robots is deployed to execute two tasks subject to energy and resilience constraints.
Safety of Dynamical Systems with Multiple Non-Convex Unsafe Sets Using Control Barrier Functions
Jun 11, 2021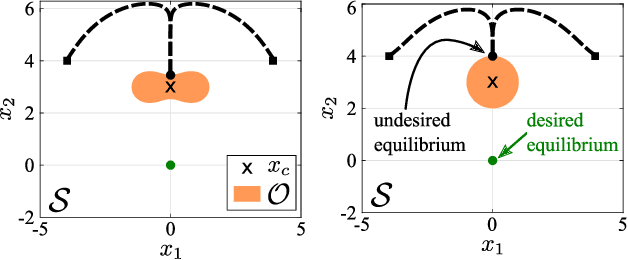

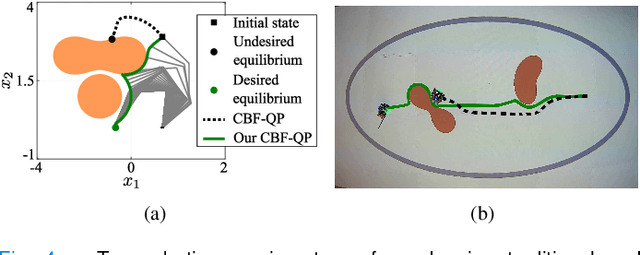
This paper presents an approach to deal with safety of dynamical systems in presence of multiple non-convex unsafe sets. While optimal control and model predictive control strategies can be employed in these scenarios, they suffer from high computational complexity in case of general nonlinear systems. Leveraging control barrier functions, on the other hand, results in computationally efficient control algorithms. Nevertheless, when safety guarantees have to be enforced alongside stability objectives, undesired asymptotically stable equilibrium points have been shown to arise. We propose a computationally efficient optimization-based approach which allows us to ensure safety of dynamical systems without introducing undesired equilibria even in presence of multiple non-convex unsafe sets. The developed control algorithm is showcased in simulation and in a real robot navigation application.
A Resilient and Energy-Aware Task Allocation Framework for Heterogeneous Multi-Robot Systems
May 12, 2021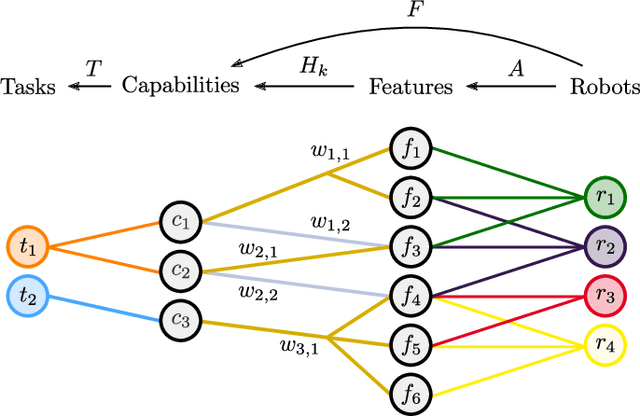
In the context of heterogeneous multi-robot teams deployed for executing multiple tasks, this paper develops an energy-aware framework for allocating tasks to robots in an online fashion. With a primary focus on long-duration autonomy applications, we opt for a survivability-focused approach. Towards this end, the task prioritization and execution -- through which the allocation of tasks to robots is effectively realized -- are encoded as constraints within an optimization problem aimed at minimizing the energy consumed by the robots at each point in time. In this context, an allocation is interpreted as a prioritization of a task over all others by each of the robots. Furthermore, we present a novel framework to represent the heterogeneous capabilities of the robots, by distinguishing between the features available on the robots, and the capabilities enabled by these features. By embedding these descriptions within the optimization problem, we make the framework resilient to situations where environmental conditions make certain features unsuitable to support a capability and when component failures on the robots occur. We demonstrate the efficacy and resilience of the proposed approach in a variety of use-case scenarios, consisting of simulations and real robot experiments.