 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Resilient and Energy-Aware Task Allocation Framework for Heterogeneous Multi-Robot Systems
May 12, 2021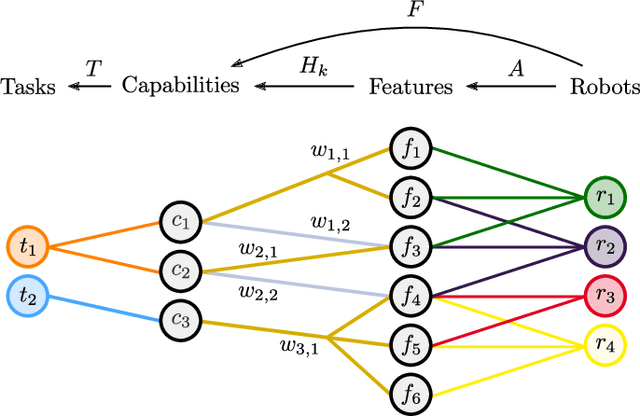
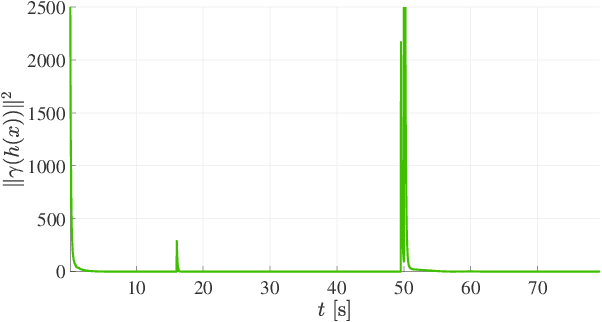
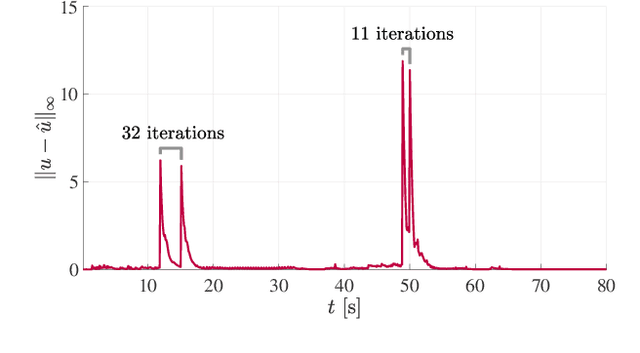
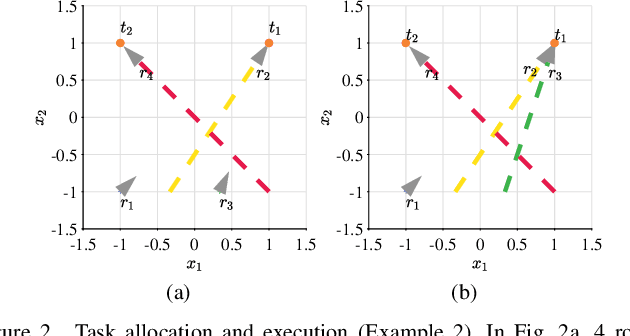
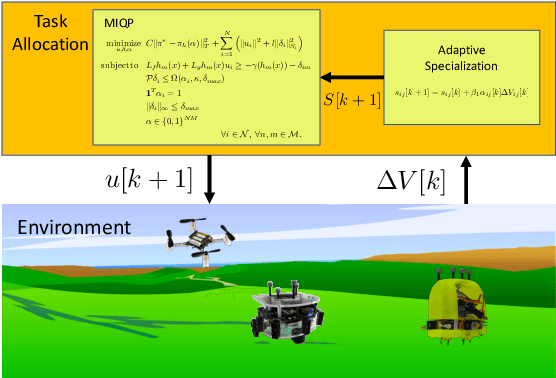
In the context of heterogeneous multi-robot teams deployed for executing multiple tasks, this paper develops an energy-aware framework for allocating tasks to robots in an online fashion. With a primary focus on long-duration autonomy applications, we opt for a survivability-focused approach. Towards this end, the task prioritization and execution -- through which the allocation of tasks to robots is effectively realized -- are encoded as constraints within an optimization problem aimed at minimizing the energy consumed by the robots at each point in time. In this context, an allocation is interpreted as a prioritization of a task over all others by each of the robots. Furthermore, we present a novel framework to represent the heterogeneous capabilities of the robots, by distinguishing between the features available on the robots, and the capabilities enabled by these features. By embedding these descriptions within the optimization problem, we make the framework resilient to situations where environmental conditions make certain features unsuitable to support a capability and when component failures on the robots occur. We demonstrate the efficacy and resilience of the proposed approach in a variety of use-case scenarios, consisting of simulations and real robot experiments.
Adaptive Task Allocation for Heterogeneous Multi-Robot Teams with Evolving and Unknown Robot Capabilities
Mar 06, 2020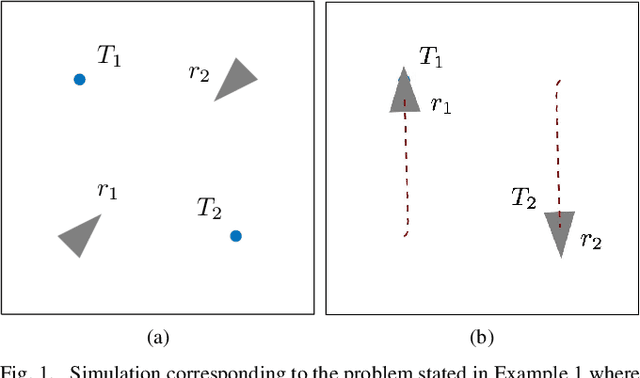
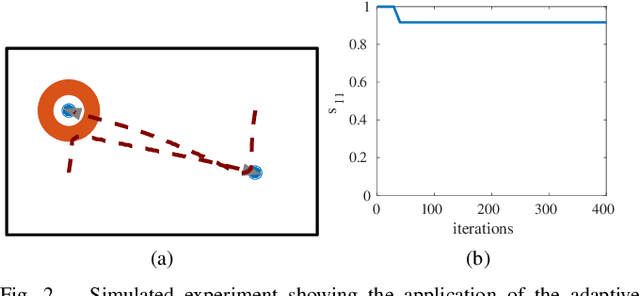
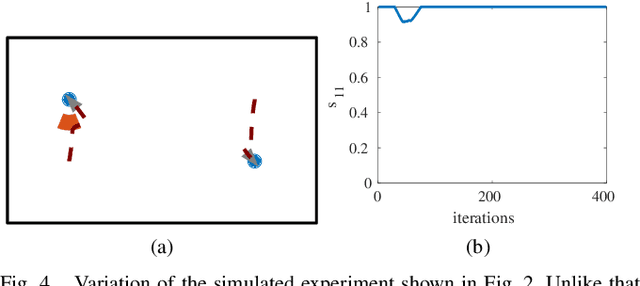
For multi-robot teams with heterogeneous capabilities, typical task allocation methods assign tasks to robots based on the suitability of the robots to perform certain tasks as well as the requirements of the task itself. However, in real-world deployments of robot teams, the suitability of a robot might be unknown prior to deployment, or might vary due to changing environmental conditions. This paper presents an adaptive task allocation and task execution framework which allows individual robots to prioritize among tasks while explicitly taking into account their efficacy at performing the tasks---the parameters of which might be unknown before deployment and/or might vary over time. Such a \emph{specialization} parameter---encoding the effectiveness of a given robot towards a task---is updated on-the-fly, allowing our algorithm to reassign tasks among robots with the aim of executing them. The developed framework requires no explicit model of the changing environment or of the unknown robot capabilities---it only takes into account the progress made by the robots at completing the tasks. Simulations and experiments demonstrate the efficacy of the proposed approach during variations in environmental conditions and when robot capabilities are unknown before deployment.
Learning flexible representations of stochastic processes on graphs
Mar 13, 2018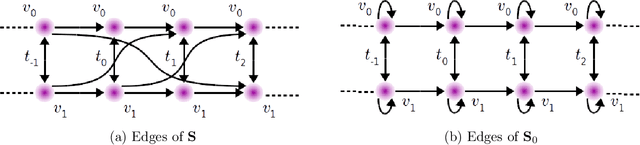
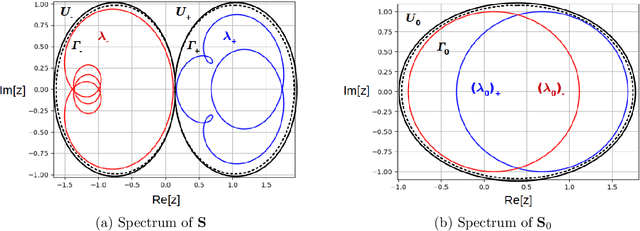
Graph convolutional networks adapt the architecture of convolutional neural networks to learn rich representations of data supported on arbitrary graphs by replacing the convolution operations of convolutional neural networks with graph-dependent linear operations. However, these graph-dependent linear operations are developed for scalar functions supported on undirected graphs. We propose a class of linear operations for stochastic (time-varying) processes on directed (or undirected) graphs to be used in graph convolutional networks. We propose a parameterization of such linear operations using functional calculus to achieve arbitrarily low learning complexity. The proposed approach is shown to model richer behaviors and display greater flexibility in learning representations than product graph methods.