 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Task Allocation for Heterogeneous Multi-Robot Teams with Evolving and Unknown Robot Capabilities
Paper and Code
Mar 06, 2020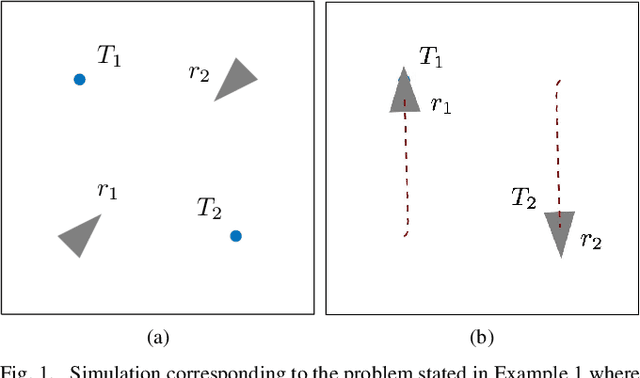
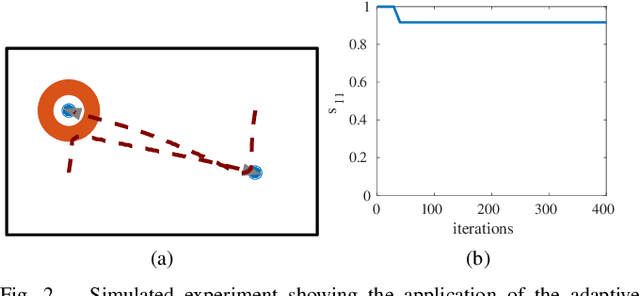
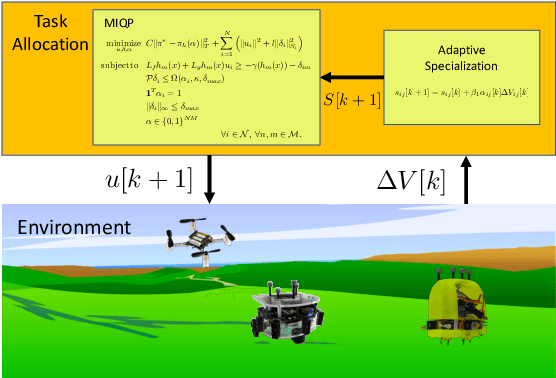
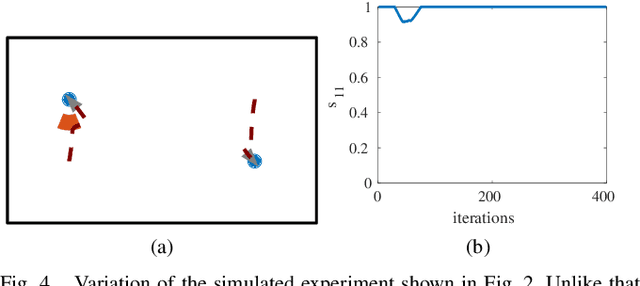
For multi-robot teams with heterogeneous capabilities, typical task allocation methods assign tasks to robots based on the suitability of the robots to perform certain tasks as well as the requirements of the task itself. However, in real-world deployments of robot teams, the suitability of a robot might be unknown prior to deployment, or might vary due to changing environmental conditions. This paper presents an adaptive task allocation and task execution framework which allows individual robots to prioritize among tasks while explicitly taking into account their efficacy at performing the tasks---the parameters of which might be unknown before deployment and/or might vary over time. Such a \emph{specialization} parameter---encoding the effectiveness of a given robot towards a task---is updated on-the-fly, allowing our algorithm to reassign tasks among robots with the aim of executing them. The developed framework requires no explicit model of the changing environment or of the unknown robot capabilities---it only takes into account the progress made by the robots at completing the tasks. Simulations and experiments demonstrate the efficacy of the proposed approach during variations in environmental conditions and when robot capabilities are unknown before deployment.