 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilience and Energy-Awareness in Constraint-Driven-Controlled Multi-Robot Systems
Paper and Code
Jun 15, 2022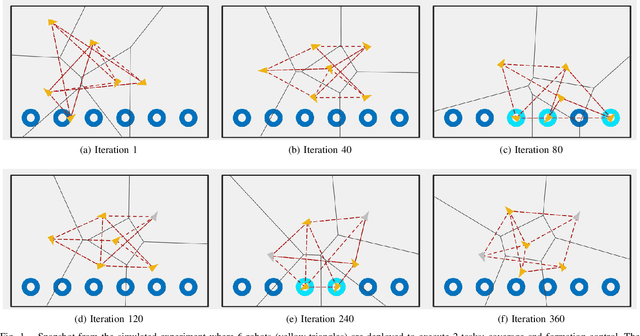



In the context of constraint-driven control of multi-robot systems, in this paper, we propose an optimization-based framework that is able to ensure resilience and energy-awareness of teams of robots. The approach is based on a novel, frame-theoretic, measure of resilience which allows us to analyze and enforce resilient behaviors of multi-robot systems. The properties of resilience and energy-awareness are encoded as constraints of a convex optimization program which is used to synthesize the robot control inputs. This allows for the combination of such properties with the execution of coordinated tasks to achieve resilient and energy-aware robot operations. The effectiveness of the proposed method is illustrated in a simulated scenario where a team of robots is deployed to execute two tasks subject to energy and resilience constraints.