 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable Deep Convolutional Multi-Type Anomaly Detection
Nov 14, 2025



Most explainable anomaly detection methods often identify anomalies but lack the capability to differentiate the type of anomaly. Furthermore, they often require the costly training and maintenance of separate models for each object category. The lack of specificity is a significant research gap, as identifying the type of anomaly (e.g., "Crack" vs. "Scratch") is crucial for accurate diagnosis that facilitates cost-saving operational decisions across diverse application domains. While some recent large-scale Vision-Language Models (VLMs) have begun to address this, they are computationally intensive and memory-heavy, restricting their use in real-time or embedded systems. We propose MultiTypeFCDD, a simple and lightweight convolutional framework designed as a practical alternative for explainable multi-type anomaly detection. MultiTypeFCDD uses only image-level labels to learn and produce multi-channel heatmaps, where each channel is trained to correspond to a specific anomaly type. The model functions as a single, unified framework capable of differentiating anomaly types across multiple object categories, eliminating the need to train and manage separate models for each object category. We evaluated our proposed method on the Real-IAD dataset and it delivers results competitive with state-of-the-art complex models at significantly reduced parametric load and inference times. This makes it a highly practical and viable solution for real-world applications where computational resources are tightly constrained.
Explainable Deep Anomaly Detection with Sequential Hypothesis Testing for Robotic Sewer Inspection
Jul 30, 2025Sewer pipe faults, such as leaks and blockages, can lead to severe consequences including groundwater contamination, property damage, and service disruption. Traditional inspection methods rely heavily on the manual review of CCTV footage collected by mobile robots, which is inefficient and susceptible to human error. To automate this process, we propose a novel system incorporating explainable deep learning anomaly detection combined with sequential probability ratio testing (SPRT). The anomaly detector processes single image frames, providing interpretable spatial localisation of anomalies, whilst the SPRT introduces temporal evidence aggregation, enhancing robustness against noise over sequences of image frames. Experimental results demonstrate improved anomaly detection performance, highlighting the benefits of the combined spatiotemporal analysis system for reliable and robust sewer inspection.
Towards Lightweight Hyperspectral Image Super-Resolution with Depthwise Separable Dilated Convolutional Network
May 01, 2025Deep neural networks have demonstrated highly competitive performance in super-resolution (SR) for natural images by learning mappings from low-resolution (LR) to high-resolution (HR) images. However, hyperspectral super-resolution remains an ill-posed problem due to the high spectral dimensionality of the data and the scarcity of available training samples. Moreover, existing methods often rely on large models with a high number of parameters or require the fusion with panchromatic or RGB images, both of which are often impractical in real-world scenarios. Inspired by the MobileNet architecture, we introduce a lightweight depthwise separable dilated convolutional network (DSDCN) to address the aforementioned challenges. Specifically, our model leverages multiple depthwise separable convolutions, similar to the MobileNet architecture, and further incorporates a dilated convolution fusion block to make the model more flexible for the extraction of both spatial and spectral features. In addition, we propose a custom loss function that combines mean squared error (MSE), an L2 norm regularization-based constraint, and a spectral angle-based loss, ensuring the preservation of both spectral and spatial details. The proposed model achieves very competitive performance on two publicly available hyperspectral datasets, making it well-suited for hyperspectral image super-resolution tasks. The source codes are publicly available at: \href{https://github.com/Usman1021/lightweight}{https://github.com/Usman1021/lightweight}.
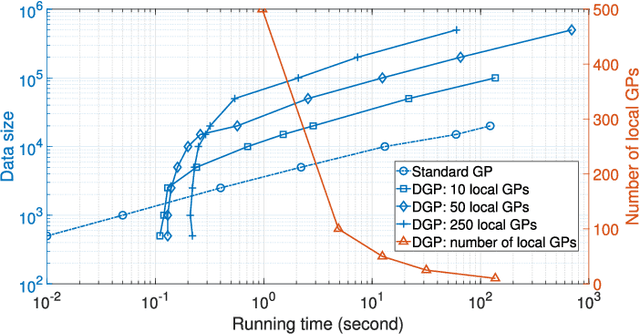
Review of Recent Advances in Gaussian Process Regression Methods
Sep 12, 2024Gaussian process (GP) methods have been widely studied recently, especially for large-scale systems with big data and even more extreme cases when data is sparse. Key advantages of these methods consist in: 1) the ability to provide inherent ways to assess the impact of uncertainties (especially in the data, and environment) on the solutions, 2) have efficient factorisation based implementations and 3) can be implemented easily in distributed manners and hence provide scalable solutions. This paper reviews the recently developed key factorised GP methods such as the hierarchical off-diagonal low-rank approximation methods and GP with Kronecker structures. An example illustrates the performance of these methods with respect to accuracy and computational complexity.
Gaussian Process Upper Confidence Bounds in Distributed Point Target Tracking over Wireless Sensor Networks
Sep 11, 2024
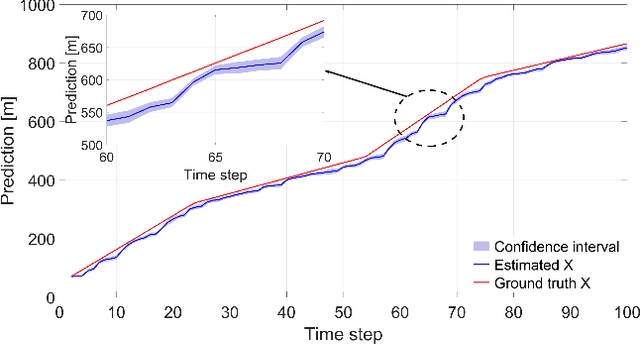

Uncertainty quantification plays a key role in the development of autonomous systems, decision-making, and tracking over wireless sensor networks (WSNs). However, there is a need of providing uncertainty confidence bounds, especially for distributed machine learning-based tracking, dealing with different volumes of data collected by sensors. This paper aims to fill in this gap and proposes a distributed Gaussian process (DGP) approach for point target tracking and derives upper confidence bounds (UCBs) of the state estimates. A unique contribution of this paper includes the derived theoretical guarantees on the proposed approach and its maximum accuracy for tracking with and without clutter measurements. Particularly, the developed approaches with uncertainty bounds are generic and can provide trustworthy solutions with an increased level of reliability. A novel hybrid Bayesian filtering method is proposed to enhance the DGP approach by adopting a Poisson measurement likelihood model. The proposed approaches are validated over a WSN case study, where sensors have limited sensing ranges. Numerical results demonstrate the tracking accuracy and robustness of the proposed approaches. The derived UCBs constitute a tool for trustworthiness evaluation of DGP approaches. The simulation results reveal that the proposed UCBs successfully encompass the true target states with 88% and 42% higher probability in X and Y coordinates, respectively, when compared to the confidence interval-based method.
Out-of-distribution Object Detection through Bayesian Uncertainty Estimation
Oct 29, 2023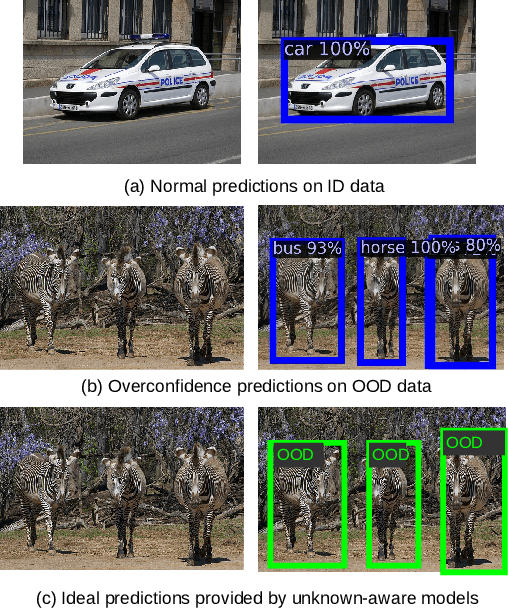

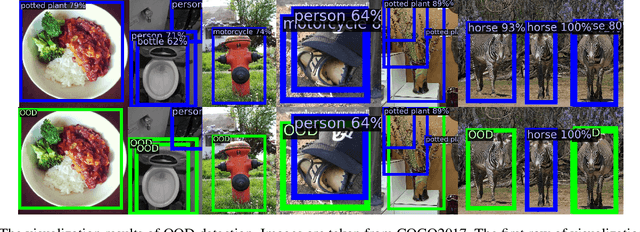

The superior performance of object detectors is often established under the condition that the test samples are in the same distribution as the training data. However, in many practical applications, out-of-distribution (OOD) instances are inevitable and usually lead to uncertainty in the results. In this paper, we propose a novel, intuitive, and scalable probabilistic object detection method for OOD detection. Unlike other uncertainty-modeling methods that either require huge computational costs to infer the weight distributions or rely on model training through synthetic outlier data, our method is able to distinguish between in-distribution (ID) data and OOD data via weight parameter sampling from proposed Gaussian distributions based on pre-trained networks. We demonstrate that our Bayesian object detector can achieve satisfactory OOD identification performance by reducing the FPR95 score by up to 8.19% and increasing the AUROC score by up to 13.94% when trained on BDD100k and VOC datasets as the ID datasets and evaluated on COCO2017 dataset as the OOD dataset.
Robust Learning via Ensemble Density Propagation in Deep Neural Networks
Nov 10, 2021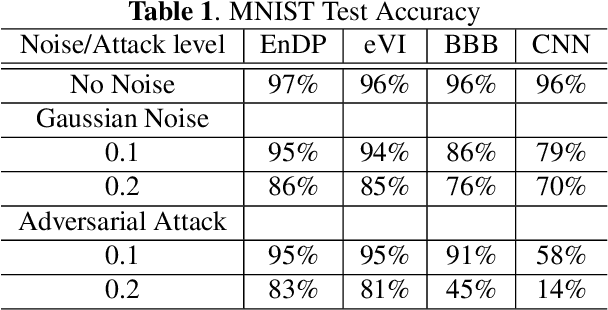
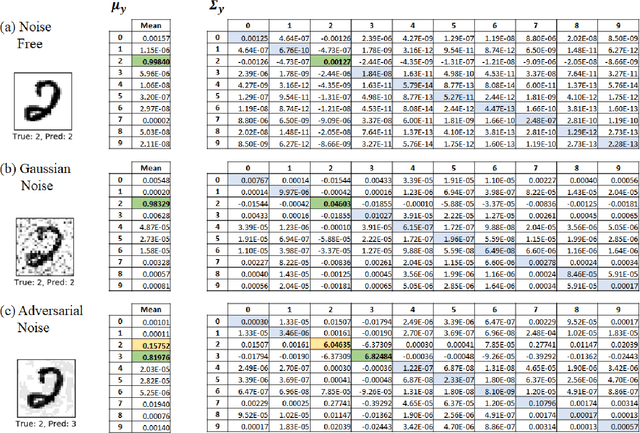
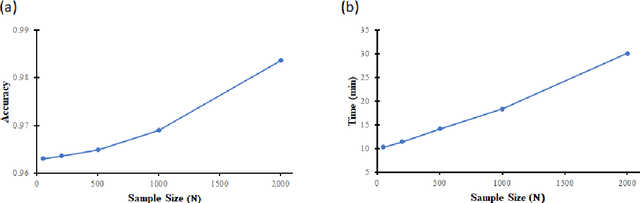
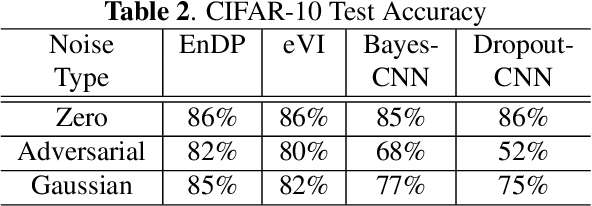
Learning in uncertain, noisy, or adversarial environments is a challenging task for deep neural networks (DNNs). We propose a new theoretically grounded and efficient approach for robust learning that builds upon Bayesian estimation and Variational Inference. We formulate the problem of density propagation through layers of a DNN and solve it using an Ensemble Density Propagation (EnDP) scheme. The EnDP approach allows us to propagate moments of the variational probability distribution across the layers of a Bayesian DNN, enabling the estimation of the mean and covariance of the predictive distribution at the output of the model. Our experiments using MNIST and CIFAR-10 datasets show a significant improvement in the robustness of the trained models to random noise and adversarial attacks.
Scalable Learning With a Structural Recurrent Neural Network for Short-Term Traffic Prediction
Mar 03, 2021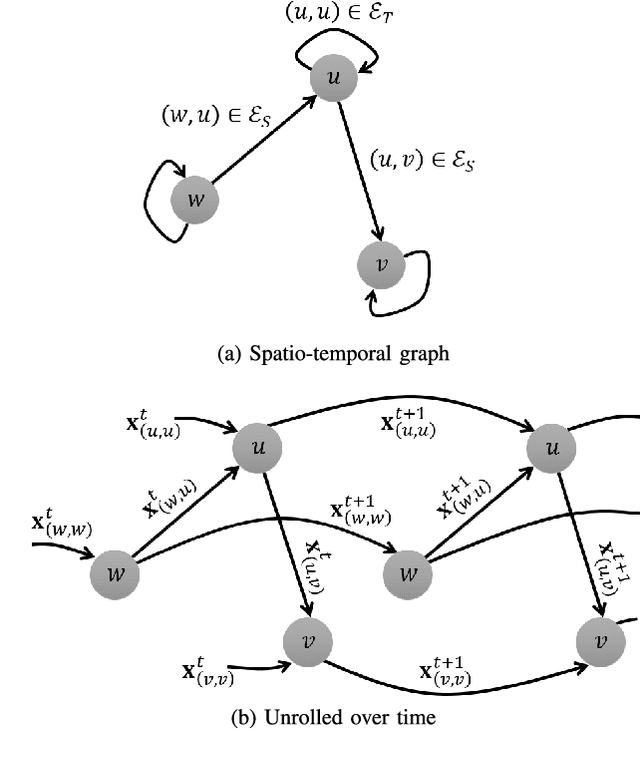
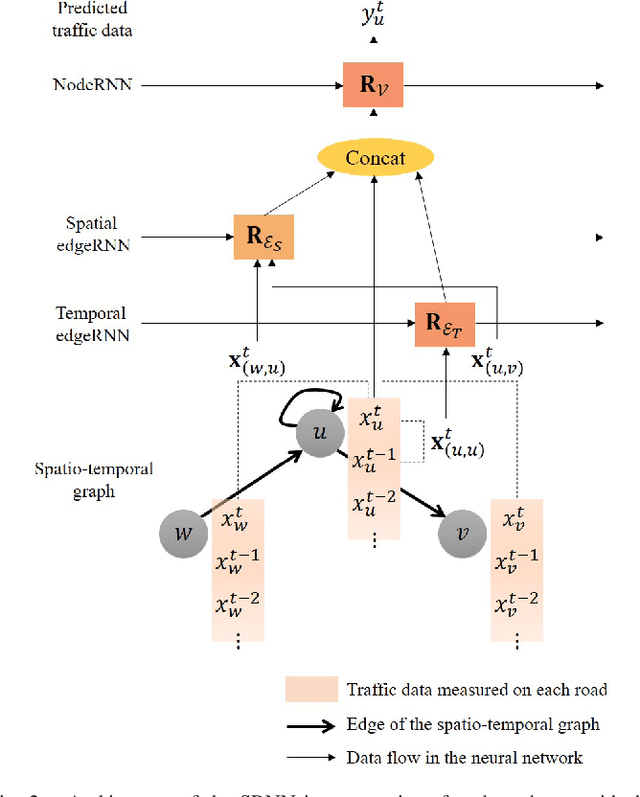
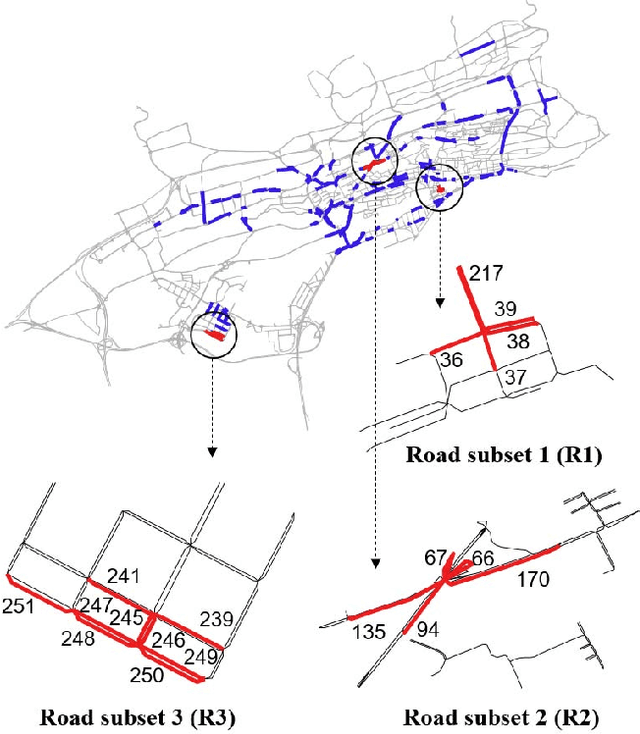
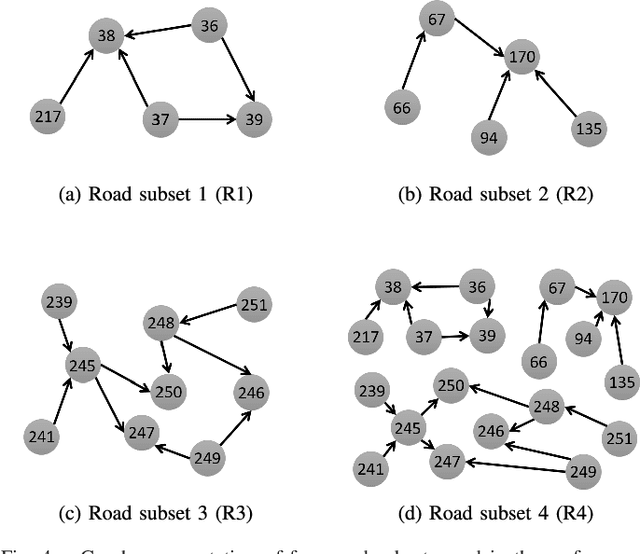
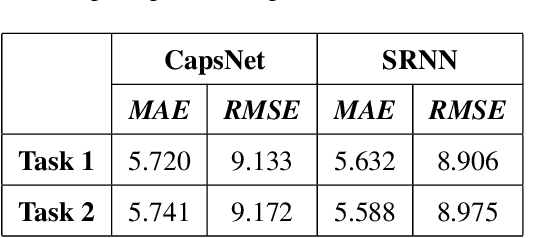
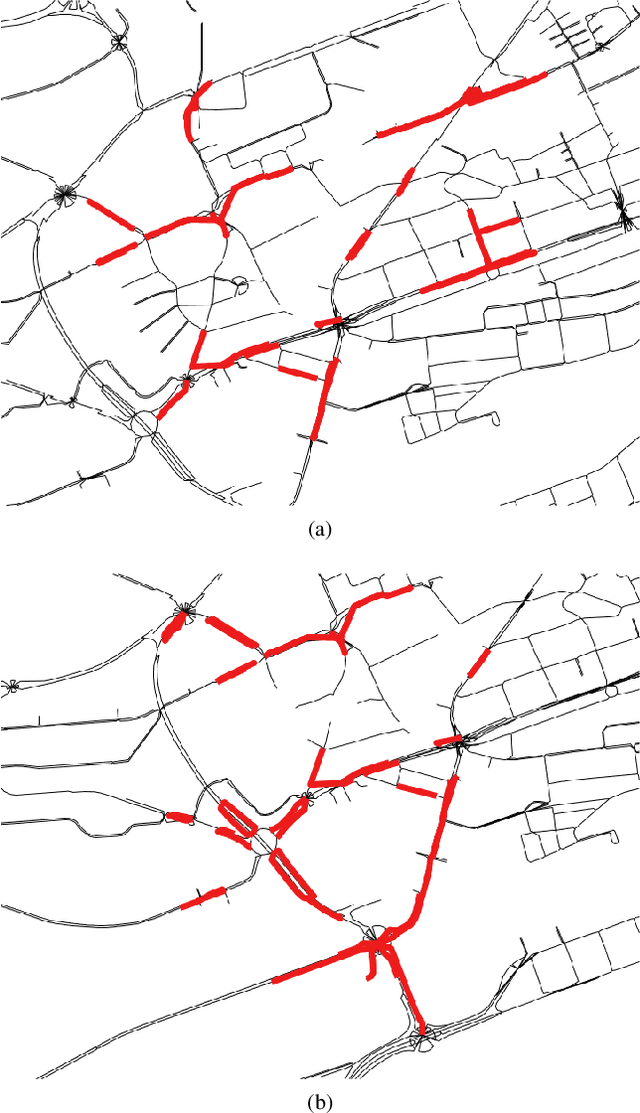
This paper presents a scalable deep learning approach for short-term traffic prediction based on historical traffic data in a vehicular road network. Capturing the spatio-temporal relationship of the big data often requires a significant amount of computational burden or an ad-hoc design aiming for a specific type of road network. To tackle the problem, we combine a road network graph with recurrent neural networks (RNNs) to construct a structural RNN (SRNN). The SRNN employs a spatio-temporal graph to infer the interaction between adjacent road segments as well as the temporal dynamics of the time series data. The model is scalable thanks to two key aspects. First, the proposed SRNN architecture is built by using the semantic similarity of the spatio-temporal dynamic interactions of all segments. Second, we design the architecture to deal with fixed-length tensors regardless of the graph topology. With the real traffic speed data measured in the city of Santander, we demonstrate the proposed SRNN outperforms the image-based approaches using the capsule network (CapsNet) by 14.1% and the convolutional neural network (CNN) by 5.87%, respectively, in terms of root mean squared error (RMSE). Moreover, we show that the proposed model is scalable. The SRNN model trained with data of a road network is able to predict traffic speed of different road networks, with the fixed number of parameters to train.
* 9 pages, 6 figures
Variational Bayesian inference of hidden stochastic processes with unknown parameters
Nov 02, 2019



Estimating hidden processes from non-linear noisy observations is particularly difficult when the parameters of these processes are not known. This paper adopts a machine learning approach to devise variational Bayesian inference for such scenarios. In particular, a random process generated by the autoregressive moving average (ARMA) linear model is inferred from non-linearity noise observations. The posterior distribution of hidden states are approximated by a set of weighted particles generated by the sequential Monte carlo (SMC) algorithm involving sampling with importance sampling resampling (SISR). Numerical efficiency and estimation accuracy of the proposed inference method are evaluated by computer simulations. Furthermore, the proposed inference method is demonstrated on a practical problem of estimating the missing values in the gene expression time series assuming vector autoregressive (VAR) data model.
Structural Recurrent Neural Network for Traffic Speed Prediction
Feb 18, 2019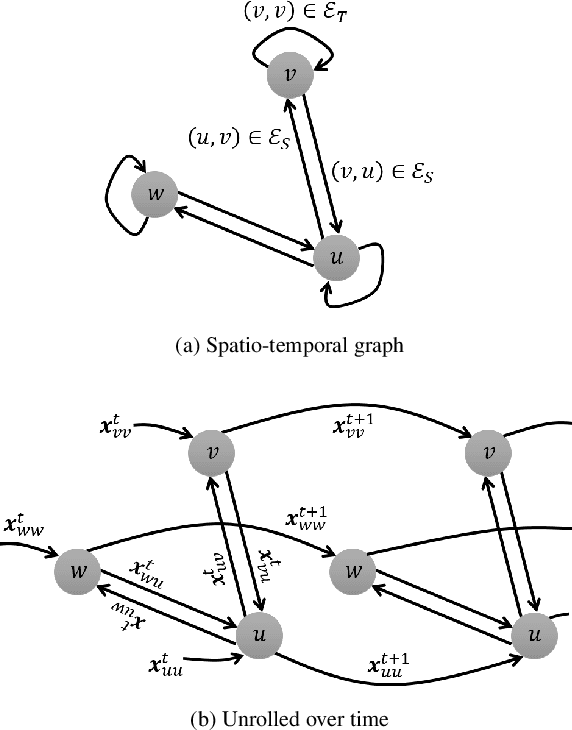
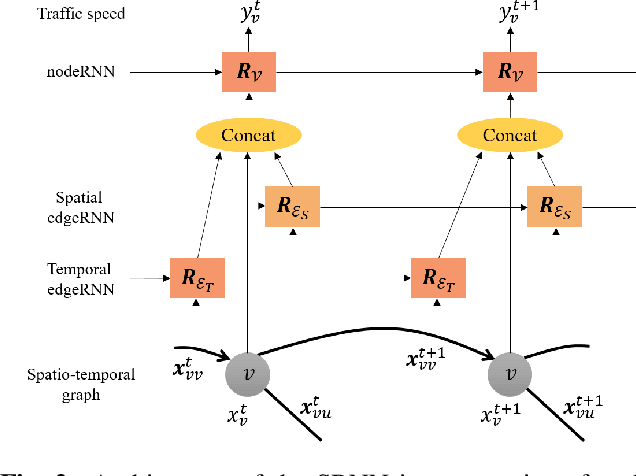
Deep neural networks have recently demonstrated the traffic prediction capability with the time series data obtained by sensors mounted on road segments. However, capturing spatio-temporal features of the traffic data often requires a significant number of parameters to train, increasing computational burden. In this work we demonstrate that embedding topological information of the road network improves the process of learning traffic features. We use a graph of a vehicular road network with recurrent neural networks (RNNs) to infer the interaction between adjacent road segments as well as the temporal dynamics. The topology of the road network is converted into a spatio-temporal graph to form a structural RNN (SRNN). The proposed approach is validated over traffic speed data from the road network of the city of Santander in Spain. The experiment shows that the graph-based method outperforms the state-of-the-art methods based on spatio-temporal images, requiring much fewer parameters to train.