 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Motion Detection Using Sharpened Dimensionality Reduction and Clustering
Feb 23, 2022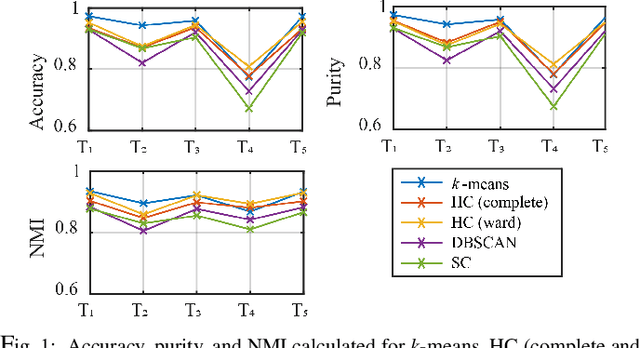
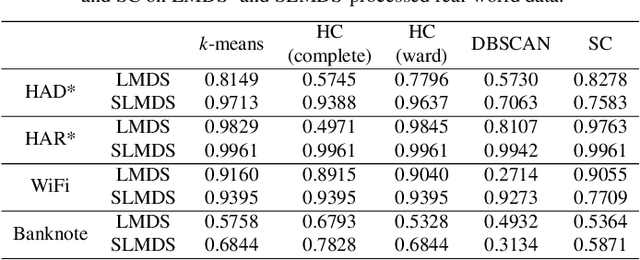
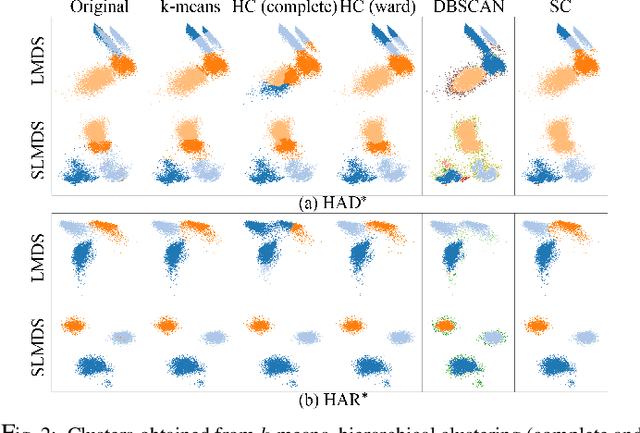
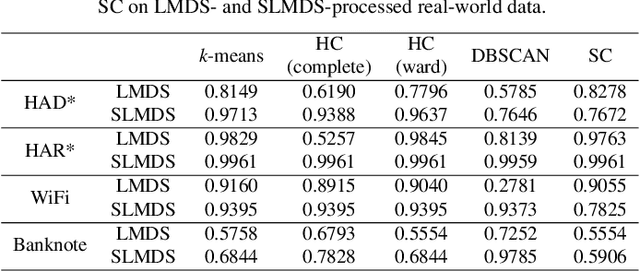
Sharpened dimensionality reduction (SDR), which belongs to the class of multidimensional projection techniques, has recently been introduced to tackle the challenges in the exploratory and visual analysis of high-dimensional data. SDR has been applied to various real-world datasets, such as human activity sensory data and astronomical datasets. However, manually labeling the samples from the generated projection are expensive. To address this problem, we propose here to use clustering methods such as k-means, Hierarchical Clustering, Density-Based Spatial Clustering of Applications with Noise (DBSCAN), and Spectral Clustering to easily label the 2D projections of high-dimensional data. We test our pipeline of SDR and the clustering methods on a range of synthetic and real-world datasets, including two different public human activity datasets extracted from smartphone accelerometer or gyroscope recordings of various movements. We apply clustering to assess the visual cluster separation of SDR, both qualitatively and quantitatively. We conclude that clustering SDR results yields better labeling results than clustering plain DR, and that k-means is the recommended clustering method for SDR in terms of clustering accuracy, ease-of-use, and computational scalability.
Visual Cluster Separation Using High-Dimensional Sharpened Dimensionality Reduction
Oct 01, 2021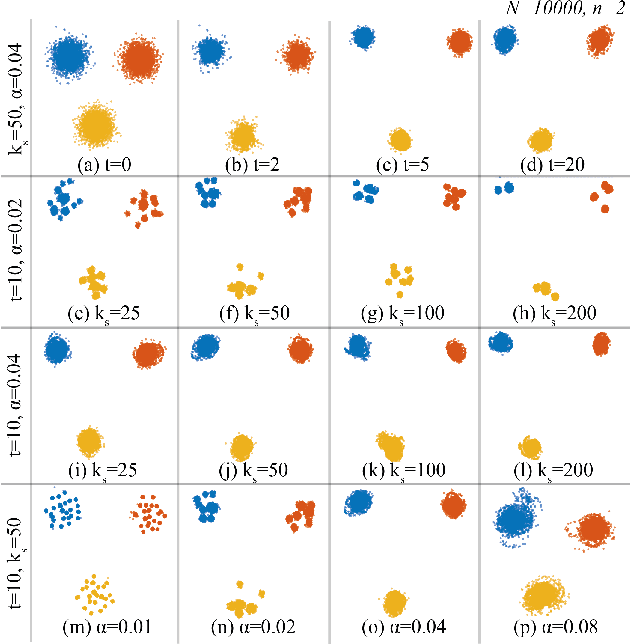

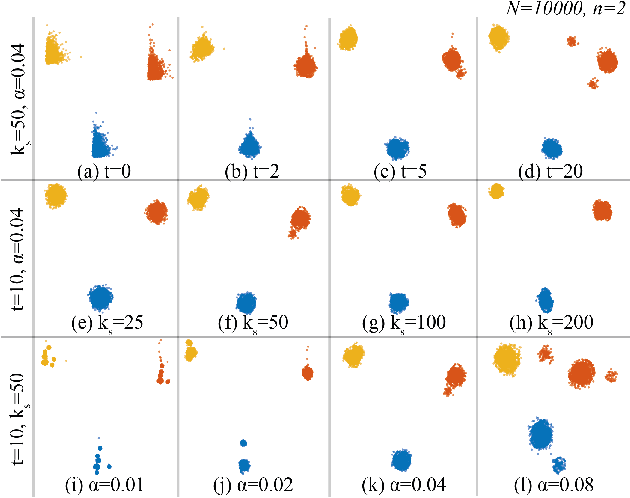
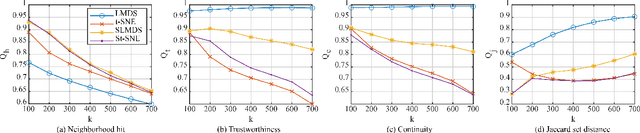
Applying dimensionality reduction (DR) to large, high-dimensional data sets can be challenging when distinguishing the underlying high-dimensional data clusters in a 2D projection for exploratory analysis. We address this problem by first sharpening the clusters in the original high-dimensional data prior to the DR step using Local Gradient Clustering (LGC). We then project the sharpened data from the high-dimensional space to 2D by a user-selected DR method. The sharpening step aids this method to preserve cluster separation in the resulting 2D projection. With our method, end-users can label each distinct cluster to further analyze an otherwise unlabeled data set. Our `High-Dimensional Sharpened DR' (HD-SDR) method, tested on both synthetic and real-world data sets, is favorable to DR methods with poor cluster separation and yields a better visual cluster separation than these DR methods with no sharpening. Our method achieves good quality (measured by quality metrics) and scales computationally well with large high-dimensional data. To illustrate its concrete applications, we further apply HD-SDR on a recent astronomical catalog.
Aerial Map-Based Navigation Using Semantic Segmentation and Pattern Matching
Jul 01, 2021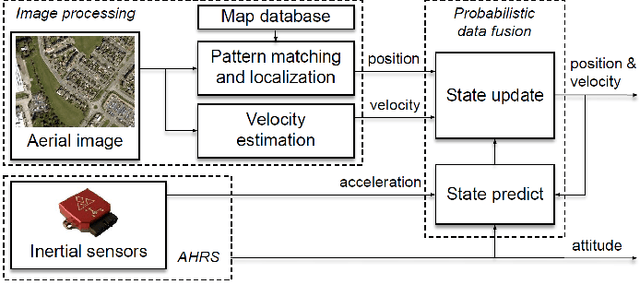
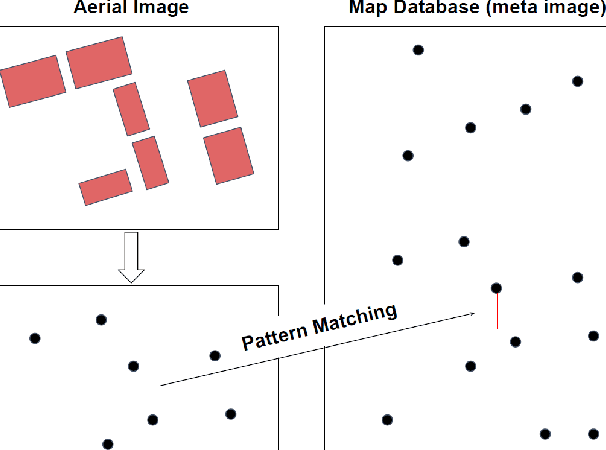
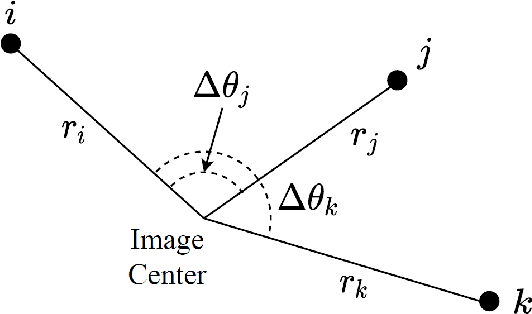
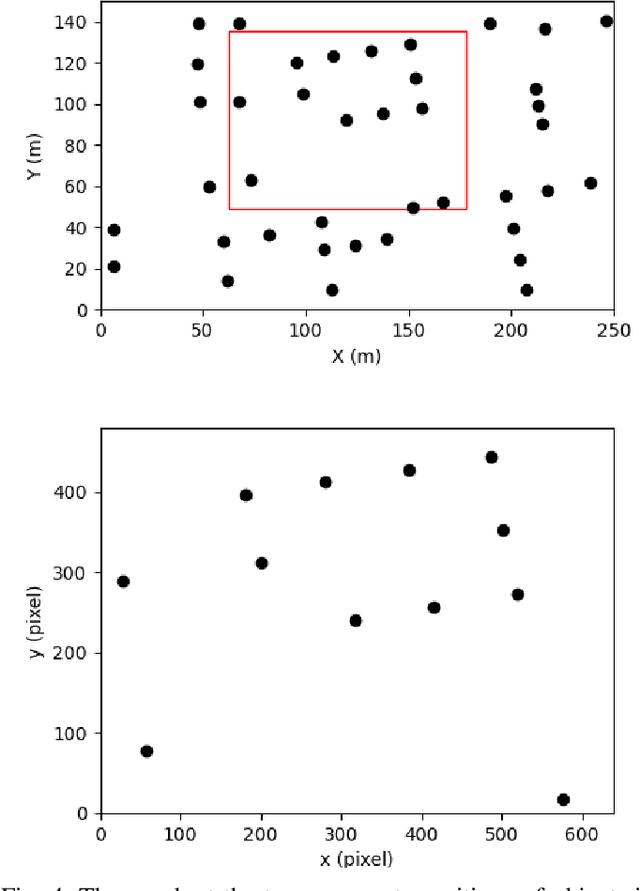
This paper proposes a novel approach to map-based navigation system for unmanned aircraft. The proposed system attempts label-to-label matching, not image-to-image matching between aerial images and a map database. By using semantic segmentation, the ground objects are labelled and the configuration of the objects is used to find the corresponding location in the map database. The use of the deep learning technique as a tool for extracting high-level features reduces the image-based localization problem to a pattern matching problem. This paper proposes a pattern matching algorithm which does not require altitude information or a camera model to estimate the absolute horizontal position. The feasibility analysis with simulated images shows the proposed map-based navigation can be realized with the proposed pattern matching algorithm and it is able to provide positions given the labelled objects.
Scalable Learning With a Structural Recurrent Neural Network for Short-Term Traffic Prediction
Mar 03, 2021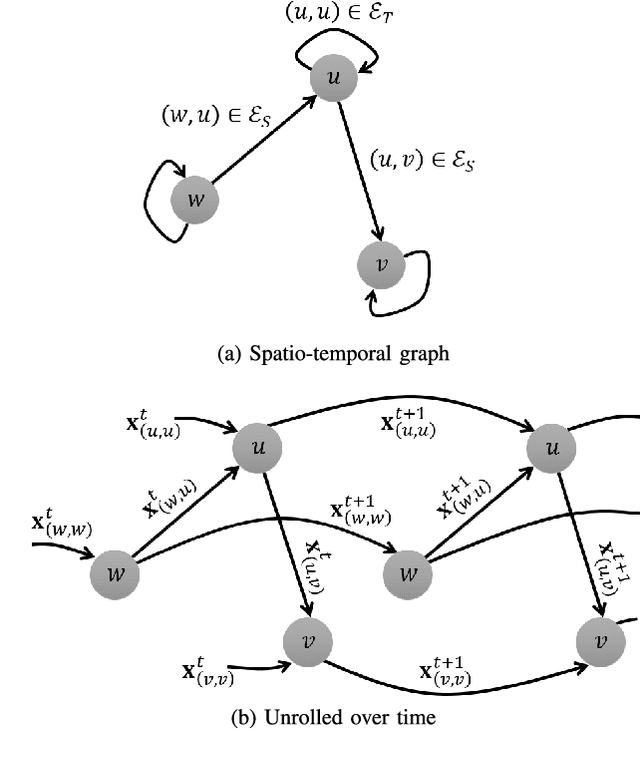
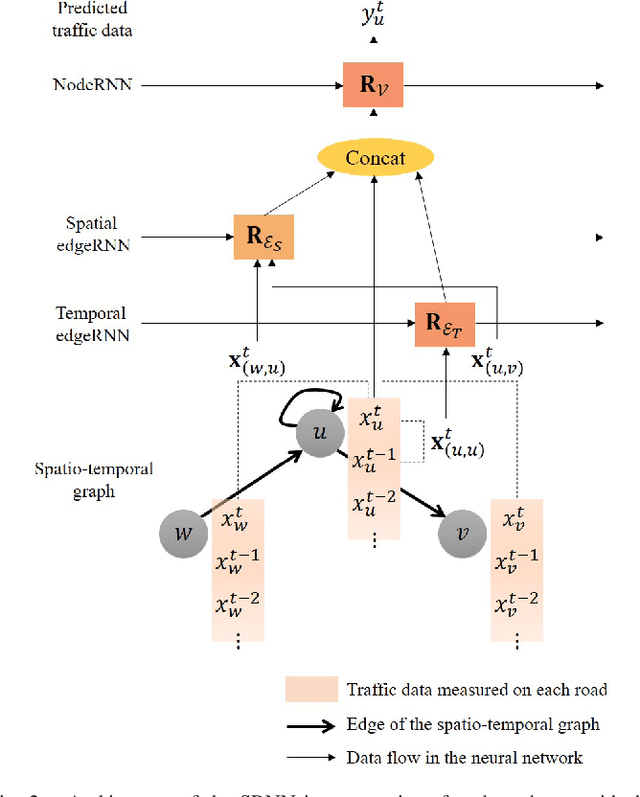
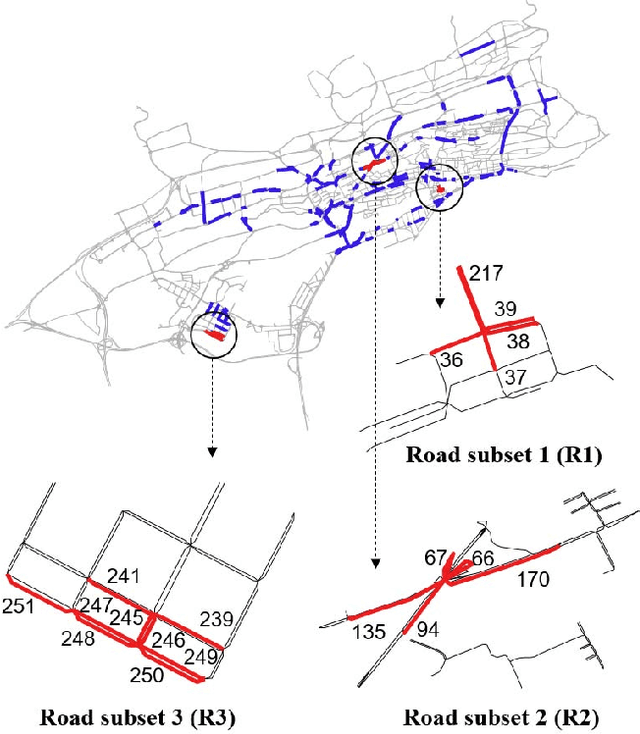
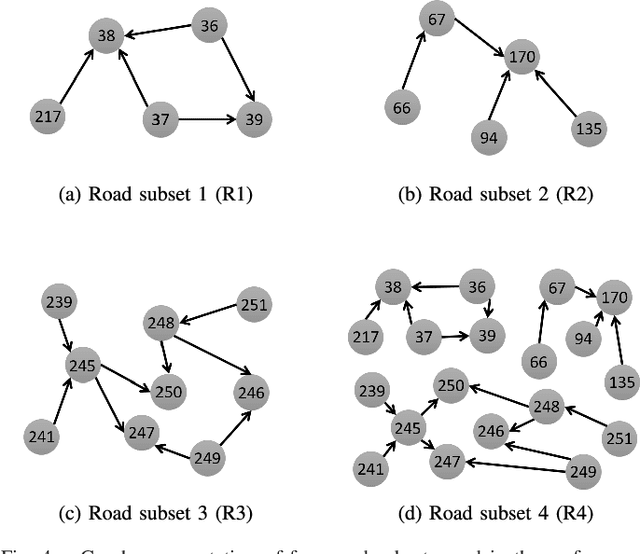
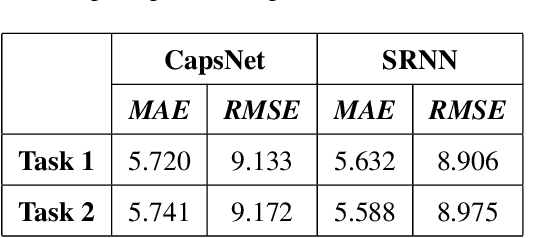
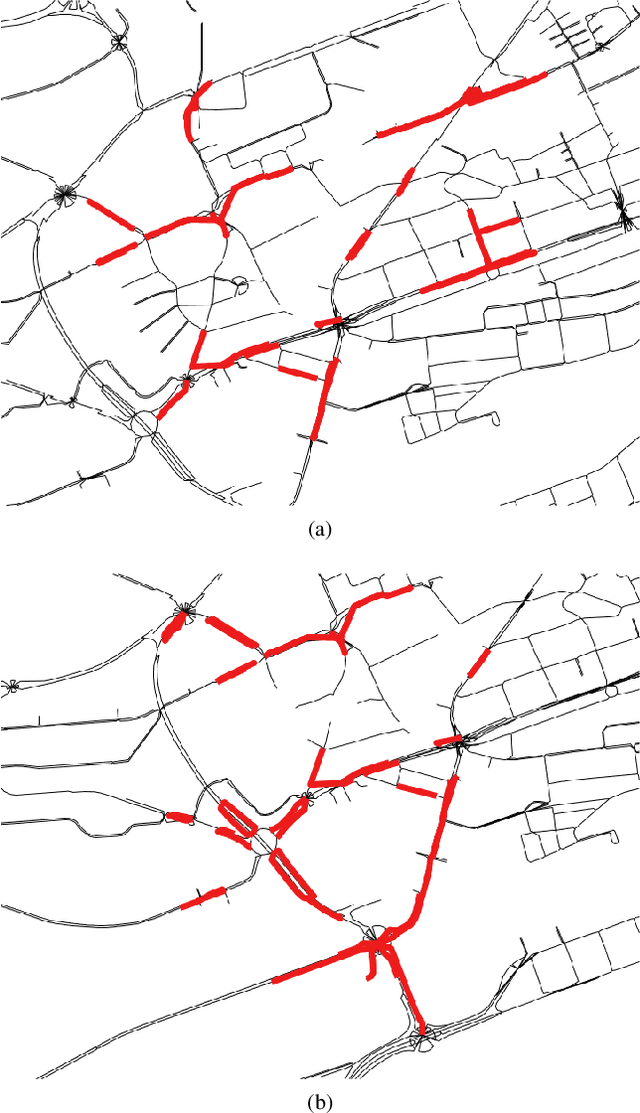
This paper presents a scalable deep learning approach for short-term traffic prediction based on historical traffic data in a vehicular road network. Capturing the spatio-temporal relationship of the big data often requires a significant amount of computational burden or an ad-hoc design aiming for a specific type of road network. To tackle the problem, we combine a road network graph with recurrent neural networks (RNNs) to construct a structural RNN (SRNN). The SRNN employs a spatio-temporal graph to infer the interaction between adjacent road segments as well as the temporal dynamics of the time series data. The model is scalable thanks to two key aspects. First, the proposed SRNN architecture is built by using the semantic similarity of the spatio-temporal dynamic interactions of all segments. Second, we design the architecture to deal with fixed-length tensors regardless of the graph topology. With the real traffic speed data measured in the city of Santander, we demonstrate the proposed SRNN outperforms the image-based approaches using the capsule network (CapsNet) by 14.1% and the convolutional neural network (CNN) by 5.87%, respectively, in terms of root mean squared error (RMSE). Moreover, we show that the proposed model is scalable. The SRNN model trained with data of a road network is able to predict traffic speed of different road networks, with the fixed number of parameters to train.
* 9 pages, 6 figures
Structural Recurrent Neural Network for Traffic Speed Prediction
Feb 18, 2019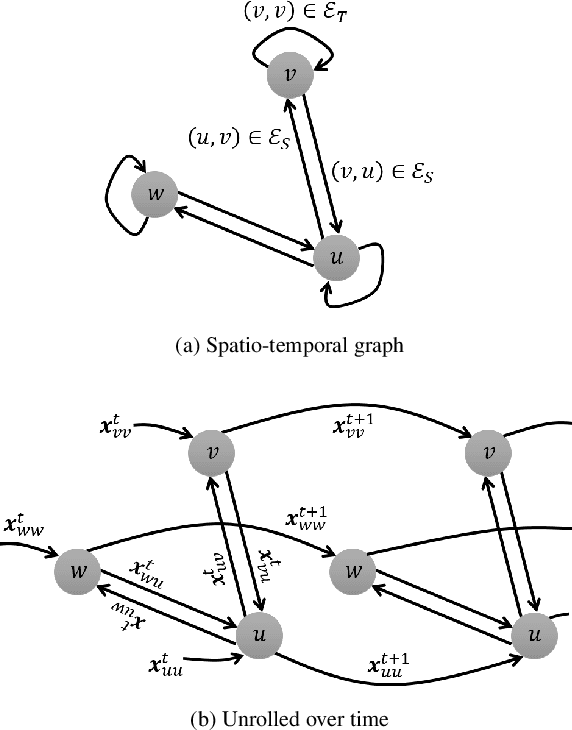
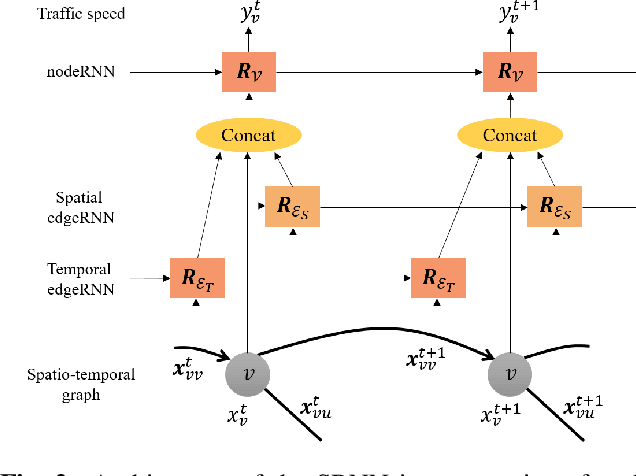
Deep neural networks have recently demonstrated the traffic prediction capability with the time series data obtained by sensors mounted on road segments. However, capturing spatio-temporal features of the traffic data often requires a significant number of parameters to train, increasing computational burden. In this work we demonstrate that embedding topological information of the road network improves the process of learning traffic features. We use a graph of a vehicular road network with recurrent neural networks (RNNs) to infer the interaction between adjacent road segments as well as the temporal dynamics. The topology of the road network is converted into a spatio-temporal graph to form a structural RNN (SRNN). The proposed approach is validated over traffic speed data from the road network of the city of Santander in Spain. The experiment shows that the graph-based method outperforms the state-of-the-art methods based on spatio-temporal images, requiring much fewer parameters to train.
A Capsule Network for Traffic Speed Prediction in Complex Road Networks
Sep 21, 2018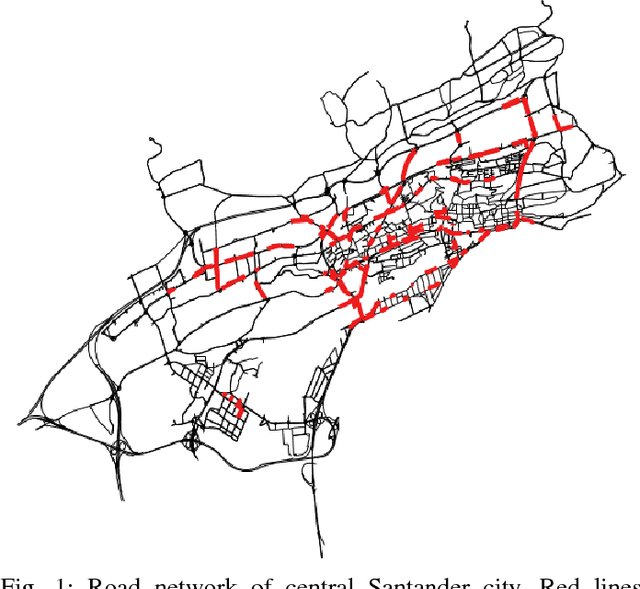
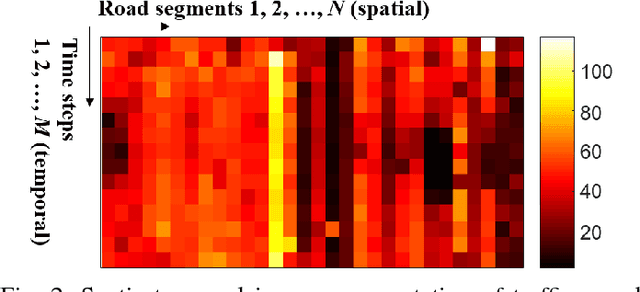
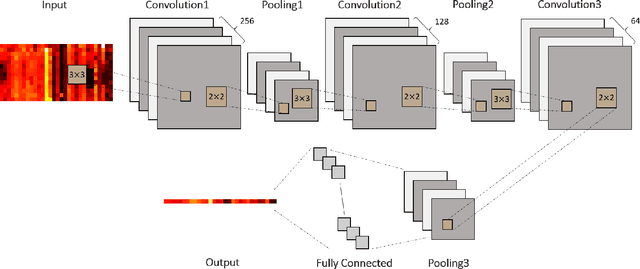
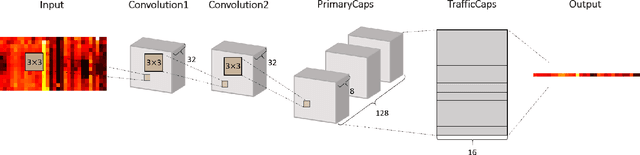
This paper proposes a deep learning approach for traffic flow prediction in complex road networks. Traffic flow data from induction loop sensors are essentially a time series, which is also spatially related to traffic in different road segments. The spatio-temporal traffic data can be converted into an image where the traffic data are expressed in a 3D space with respect to space and time axes. Although convolutional neural networks (CNNs) have been showing surprising performance in understanding images, they have a major drawback. In the max pooling operation, CNNs are losing important information by locally taking the highest activation values. The inter-relationship in traffic data measured by sparsely located sensors in different time intervals should not be neglected in order to obtain accurate predictions. Thus, we propose a neural network with capsules that replaces max pooling by dynamic routing. This is the first approach that employs the capsule network on a time series forecasting problem, to our best knowledge. Moreover, an experiment on real traffic speed data measured in the Santander city of Spain demonstrates the proposed method outperforms the state-of-the-art method based on a CNN by 13.1% in terms of root mean squared error.