 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Rapid Instrument Exchange System for Humanoid Robots in Minimally Invasive Surgery
Apr 03, 2026Humanoid robot technologies have demonstrated immense potential for minimally invasive surgery (MIS). Unlike dedicated multi-arm surgical platforms, the inherent dual-arm configuration of humanoid robots necessitates an efficient instrument exchange capability to perform complex procedures, mimicking the natural workflow where surgeons manually switch instruments. To address this, this paper proposes an immersive teleoperated rapid instrument exchange system. The system utilizes a low-latency mechanism based on single-axis compliant docking and environmental constraint release. Integrated with real-time first-person view (FPV) perception via a head-mounted display (HMD), this framework significantly reduces operational complexity and cognitive load during the docking process. Comparative evaluations between experts and novices demonstrate high operational robustness and a rapidly converging learning curve; novice performance in instrument attachment and detachment improved substantially after brief training. While long-distance spatial alignment still presents challenges in time cost and collaborative stability, this study successfully validates the technical feasibility of humanoid robots executing stable instrument exchanges within constrained clinical environments.
Review of Recent Advances in Gaussian Process Regression Methods
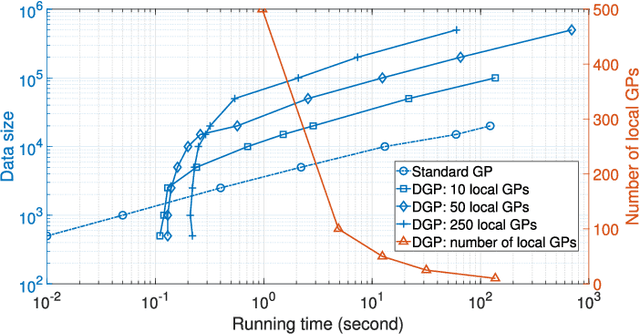
Sep 12, 2024Gaussian process (GP) methods have been widely studied recently, especially for large-scale systems with big data and even more extreme cases when data is sparse. Key advantages of these methods consist in: 1) the ability to provide inherent ways to assess the impact of uncertainties (especially in the data, and environment) on the solutions, 2) have efficient factorisation based implementations and 3) can be implemented easily in distributed manners and hence provide scalable solutions. This paper reviews the recently developed key factorised GP methods such as the hierarchical off-diagonal low-rank approximation methods and GP with Kronecker structures. An example illustrates the performance of these methods with respect to accuracy and computational complexity.
Gaussian Process Upper Confidence Bounds in Distributed Point Target Tracking over Wireless Sensor Networks
Sep 11, 2024
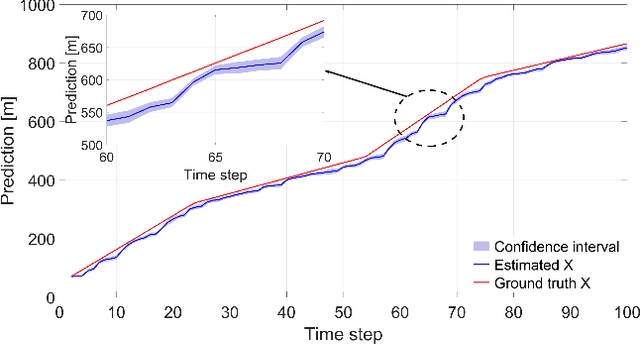

Uncertainty quantification plays a key role in the development of autonomous systems, decision-making, and tracking over wireless sensor networks (WSNs). However, there is a need of providing uncertainty confidence bounds, especially for distributed machine learning-based tracking, dealing with different volumes of data collected by sensors. This paper aims to fill in this gap and proposes a distributed Gaussian process (DGP) approach for point target tracking and derives upper confidence bounds (UCBs) of the state estimates. A unique contribution of this paper includes the derived theoretical guarantees on the proposed approach and its maximum accuracy for tracking with and without clutter measurements. Particularly, the developed approaches with uncertainty bounds are generic and can provide trustworthy solutions with an increased level of reliability. A novel hybrid Bayesian filtering method is proposed to enhance the DGP approach by adopting a Poisson measurement likelihood model. The proposed approaches are validated over a WSN case study, where sensors have limited sensing ranges. Numerical results demonstrate the tracking accuracy and robustness of the proposed approaches. The derived UCBs constitute a tool for trustworthiness evaluation of DGP approaches. The simulation results reveal that the proposed UCBs successfully encompass the true target states with 88% and 42% higher probability in X and Y coordinates, respectively, when compared to the confidence interval-based method.
Bayesian Optimisation-Assisted Neural Network Training Technique for Radio Localisation
Mar 08, 2022



Radio signal-based (indoor) localisation technique is important for IoT applications such as smart factory and warehouse. Through machine learning, especially neural networks methods, more accurate mapping from signal features to target positions can be achieved. However, different radio protocols, such as WiFi, Bluetooth, etc., have different features in the transmitted signals that can be exploited for localisation purposes. Also, neural networks methods often rely on carefully configured models and extensive training processes to obtain satisfactory performance in individual localisation scenarios. The above poses a major challenge in the process of determining neural network model structure, or hyperparameters, as well as the selection of training features from the available data. This paper proposes a neural network model hyperparameter tuning and training method based on Bayesian optimisation. Adaptive selection of model hyperparameters and training features can be realised with minimal need for manual model training design. With the proposed technique, the training process is optimised in a more automatic and efficient way, enhancing the applicability of neural networks in localisation.