 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraspView: Active Perception Scoring and Best-View Optimization for Robotic Grasping in Cluttered Environments
Nov 06, 2025Robotic grasping is a fundamental capability for autonomous manipulation, yet remains highly challenging in cluttered environments where occlusion, poor perception quality, and inconsistent 3D reconstructions often lead to unstable or failed grasps. Conventional pipelines have widely relied on RGB-D cameras to provide geometric information, which fail on transparent or glossy objects and degrade at close range. We present GraspView, an RGB-only robotic grasping pipeline that achieves accurate manipulation in cluttered environments without depth sensors. Our framework integrates three key components: (i) global perception scene reconstruction, which provides locally consistent, up-to-scale geometry from a single RGB view and fuses multi-view projections into a coherent global 3D scene; (ii) a render-and-score active perception strategy, which dynamically selects next-best-views to reveal occluded regions; and (iii) an online metric alignment module that calibrates VGGT predictions against robot kinematics to ensure physical scale consistency. Building on these tailor-designed modules, GraspView performs best-view global grasping, fusing multi-view reconstructions and leveraging GraspNet for robust execution. Experiments on diverse tabletop objects demonstrate that GraspView significantly outperforms both RGB-D and single-view RGB baselines, especially under heavy occlusion, near-field sensing, and with transparent objects. These results highlight GraspView as a practical and versatile alternative to RGB-D pipelines, enabling reliable grasping in unstructured real-world environments.
GP-GS: Gaussian Processes for Enhanced Gaussian Splatting
Feb 05, 2025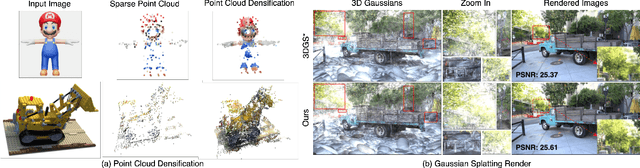
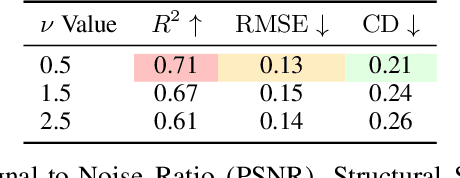
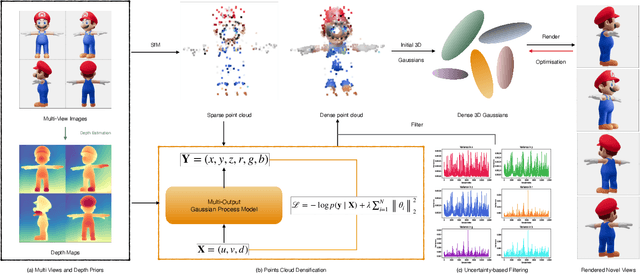
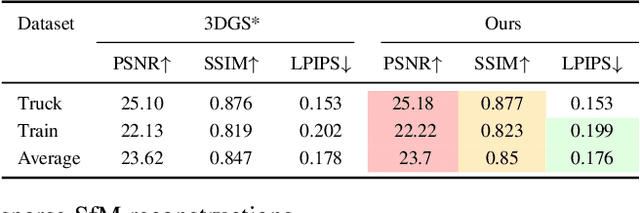
3D Gaussian Splatting has emerged as an efficient photorealistic novel view synthesis method. However, its reliance on sparse Structure-from-Motion (SfM) point clouds consistently compromises the scene reconstruction quality. To address these limitations, this paper proposes a novel 3D reconstruction framework Gaussian Processes Gaussian Splatting (GP-GS), where a multi-output Gaussian Process model is developed to achieve adaptive and uncertainty-guided densification of sparse SfM point clouds. Specifically, we propose a dynamic sampling and filtering pipeline that adaptively expands the SfM point clouds by leveraging GP-based predictions to infer new candidate points from the input 2D pixels and depth maps. The pipeline utilizes uncertainty estimates to guide the pruning of high-variance predictions, ensuring geometric consistency and enabling the generation of dense point clouds. The densified point clouds provide high-quality initial 3D Gaussians to enhance reconstruction performance. Extensive experiments conducted on synthetic and real-world datasets across various scales validate the effectiveness and practicality of the proposed framework.
Out-of-distribution Object Detection through Bayesian Uncertainty Estimation
Oct 29, 2023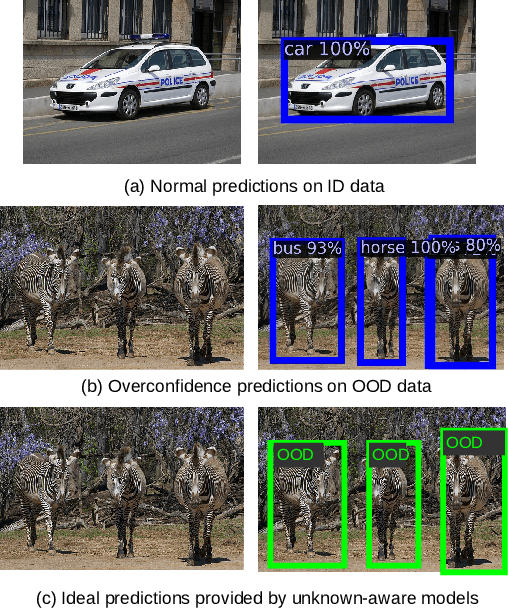

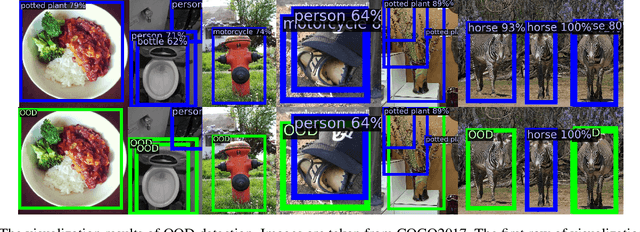

The superior performance of object detectors is often established under the condition that the test samples are in the same distribution as the training data. However, in many practical applications, out-of-distribution (OOD) instances are inevitable and usually lead to uncertainty in the results. In this paper, we propose a novel, intuitive, and scalable probabilistic object detection method for OOD detection. Unlike other uncertainty-modeling methods that either require huge computational costs to infer the weight distributions or rely on model training through synthetic outlier data, our method is able to distinguish between in-distribution (ID) data and OOD data via weight parameter sampling from proposed Gaussian distributions based on pre-trained networks. We demonstrate that our Bayesian object detector can achieve satisfactory OOD identification performance by reducing the FPR95 score by up to 8.19% and increasing the AUROC score by up to 13.94% when trained on BDD100k and VOC datasets as the ID datasets and evaluated on COCO2017 dataset as the OOD dataset.
A Human-friendly Verbal Communication Platform for Multi-Robot Systems: Design and Principles
Nov 17, 2022



While multi-robot systems have been broadly researched and deployed, their success is built chiefly upon the dependency on network infrastructures, whether wired or wireless. Aiming at the first steps toward de-coupling the application of multi-robot systems from the reliance on network infrastructures, this paper proposes a human-friendly verbal communication platform for multi-robot systems, following the deliberately designed principles of being adaptable, transparent, and secure. The platform is network independent and is subsequently capable of functioning in network infrastructure lacking environments from underwater to planet explorations. A series of experiments were conducted to demonstrate the platform's capability in multi-robot systems communication and task coordination, showing its potential in infrastructure-free applications. To benefit the community, we have made the codes open source at https://github.com/jynxmagic/MSc_AI_project
Attacking Digital Twins of Robotic Systems to Compromise Security and Safety
Nov 17, 2022
Security and safety are of paramount importance to human-robot interaction, either for autonomous robots or human-robot collaborative manufacturing. The intertwined relationship between security and safety has imposed new challenges on the emerging digital twin systems of various types of robots. To be specific, the attack of either the cyber-physical system or the digital-twin system could cause severe consequences to the other. Particularly, the attack of a digital-twin system that is synchronized with a cyber-physical system could cause lateral damage to humans and other surrounding facilities. This paper demonstrates that for Robot Operating System (ROS) driven systems, attacks such as the person-in-the-middle attack of the digital-twin system could eventually lead to a collapse of the cyber-physical system, whether it is an industrial robot or an autonomous mobile robot, causing unexpected consequences. We also discuss potential solutions to alleviate such attacks.