 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttacking Digital Twins of Robotic Systems to Compromise Security and Safety
Nov 17, 2022Security and safety are of paramount importance to human-robot interaction, either for autonomous robots or human-robot collaborative manufacturing. The intertwined relationship between security and safety has imposed new challenges on the emerging digital twin systems of various types of robots. To be specific, the attack of either the cyber-physical system or the digital-twin system could cause severe consequences to the other. Particularly, the attack of a digital-twin system that is synchronized with a cyber-physical system could cause lateral damage to humans and other surrounding facilities. This paper demonstrates that for Robot Operating System (ROS) driven systems, attacks such as the person-in-the-middle attack of the digital-twin system could eventually lead to a collapse of the cyber-physical system, whether it is an industrial robot or an autonomous mobile robot, causing unexpected consequences. We also discuss potential solutions to alleviate such attacks.
A Human-friendly Verbal Communication Platform for Multi-Robot Systems: Design and Principles
Nov 17, 2022



While multi-robot systems have been broadly researched and deployed, their success is built chiefly upon the dependency on network infrastructures, whether wired or wireless. Aiming at the first steps toward de-coupling the application of multi-robot systems from the reliance on network infrastructures, this paper proposes a human-friendly verbal communication platform for multi-robot systems, following the deliberately designed principles of being adaptable, transparent, and secure. The platform is network independent and is subsequently capable of functioning in network infrastructure lacking environments from underwater to planet explorations. A series of experiments were conducted to demonstrate the platform's capability in multi-robot systems communication and task coordination, showing its potential in infrastructure-free applications. To benefit the community, we have made the codes open source at https://github.com/jynxmagic/MSc_AI_project
Fast-Spanning Ant Colony Optimisation (FaSACO) for Mobile Robot Coverage Path Planning
May 31, 2022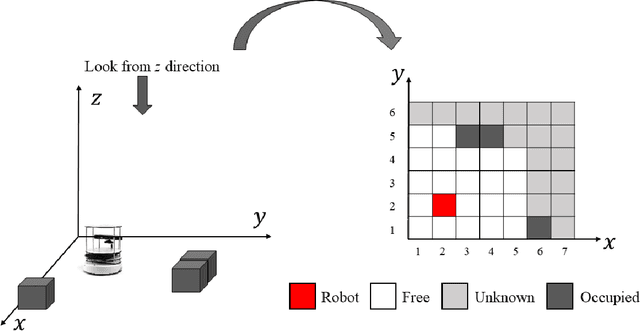
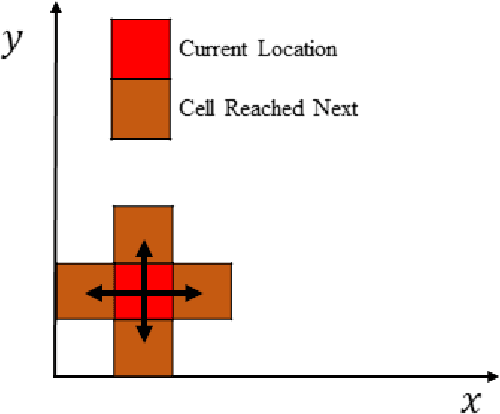
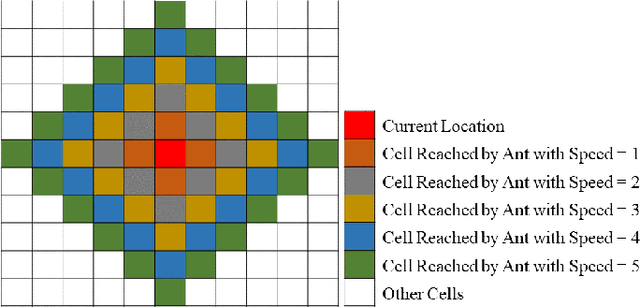
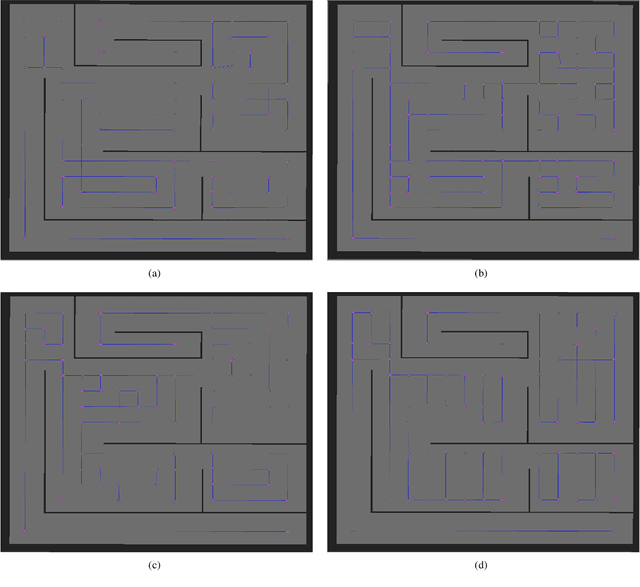
Coverage path planning acts as a key component for applications such as mobile robot vacuum cleaners and hospital disinfecting robots. However, the coverage path planning problem remains a challenge due to its NP-hard nature. Bio-inspired algorithms such as Ant Colony Optimisation (ACO) have been exploited to solve the problem because they can utilise heuristic information to mitigate the path planning complexity. This paper proposes a new variant of ACO - the Fast-Spanning Ant Colony Optimisation (FaSACO), where ants can explore the environment with various velocities. By doing so, ants with higher velocities can find targets or obstacles faster and keep lower velocity ants informed by communicating such information via trail pheromones. This mechanism ensures the optimal path is found while reducing the overall path planning time. Experimental results show that FaSACO is $19.3-32.3\%$ more efficient than ACO, and re-covers $6.9-12.5\%$ fewer cells than ACO. This makes FaSACO more appealing in real-time and energy-limited applications.