 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniRad: A Radiological Foundation Model for Multi-Task Medical Image Analysis
Feb 04, 2026Radiological analysis increasingly benefits from pretrained visual representations that can support heterogeneous downstream tasks across imaging modalities. In this work, we introduce OmniRad, a self-supervised radiological foundation model pretrained on 1.2 million medical images, designed with radiology-inspired principles emphasizing representation reuse and cross-task transferability. We evaluate the pretrained encoder under multiple downstream adaptation regimes, including lightweight task-specific adapters with a frozen backbone as well as full end-to-end fine-tuning for classification, allowing us to assess both representation quality and task-specific performance. OmniRad is evaluated on a broad suite of public benchmarks spanning classification and segmentation across multiple modalities. On the MedMNISTv2 collection, OmniRad improves classification F1 by up to 2.05% over competing foundation models. For dense prediction, OmniRad attains mean Dice score improvements across six MedSegBench datasets when using frozen representations. Qualitative analyses and latent-space visualizations suggest improved feature clustering and modality-related separation.
RedDino: A foundation model for red blood cell analysis
Aug 11, 2025Red blood cells (RBCs) are essential to human health, and their precise morphological analysis is important for diagnosing hematological disorders. Despite the promise of foundation models in medical diagnostics, comprehensive AI solutions for RBC analysis remain scarce. We present RedDino, a self-supervised foundation model designed for RBC image analysis. RedDino uses an RBC-specific adaptation of the DINOv2 self-supervised learning framework and is trained on a curated dataset of 1.25 million RBC images from diverse acquisition modalities and sources. Extensive evaluations show that RedDino outperforms existing state-of-the-art models on RBC shape classification. Through assessments including linear probing and nearest neighbor classification, we confirm its strong feature representations and generalization ability. Our main contributions are: (1) a foundation model tailored for RBC analysis, (2) ablation studies exploring DINOv2 configurations for RBC modeling, and (3) a detailed evaluation of generalization performance. RedDino addresses key challenges in computational hematology by capturing nuanced morphological features, advancing the development of reliable diagnostic tools. The source code and pretrained models for RedDino are available at https://github.com/Snarci/RedDino, and the pretrained models can be downloaded from our Hugging Face collection at https://huggingface.co/collections/Snarcy/reddino-689a13e29241d2e5690202fc
From User Preferences to Optimization Constraints Using Large Language Models
Mar 27, 2025This work explores using Large Language Models (LLMs) to translate user preferences into energy optimization constraints for home appliances. We describe a task where natural language user utterances are converted into formal constraints for smart appliances, within the broader context of a renewable energy community (REC) and in the Italian scenario. We evaluate the effectiveness of various LLMs currently available for Italian in translating these preferences resorting to classical zero-shot, one-shot, and few-shot learning settings, using a pilot dataset of Italian user requests paired with corresponding formal constraint representation. Our contributions include establishing a baseline performance for this task, publicly releasing the dataset and code for further research, and providing insights on observed best practices and limitations of LLMs in this particular domain
The 2nd Workshop on Maritime Computer Vision 2024
Nov 23, 2023



The 2nd Workshop on Maritime Computer Vision (MaCVi) 2024 addresses maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicles (USV). Three challenges categories are considered: (i) UAV-based Maritime Object Tracking with Re-identification, (ii) USV-based Maritime Obstacle Segmentation and Detection, (iii) USV-based Maritime Boat Tracking. The USV-based Maritime Obstacle Segmentation and Detection features three sub-challenges, including a new embedded challenge addressing efficicent inference on real-world embedded devices. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 195 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi24.
1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022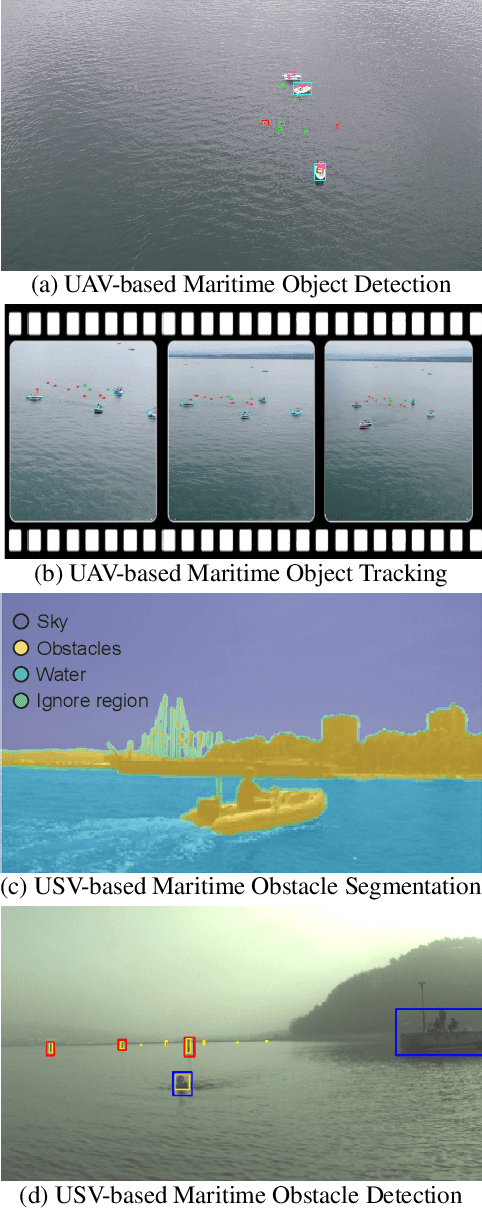
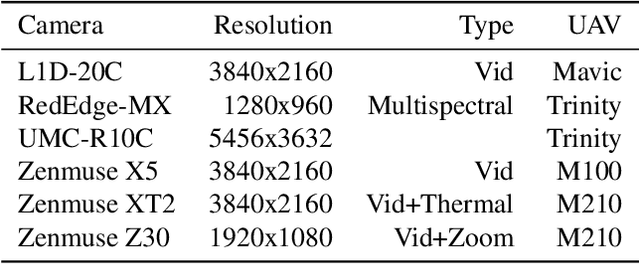
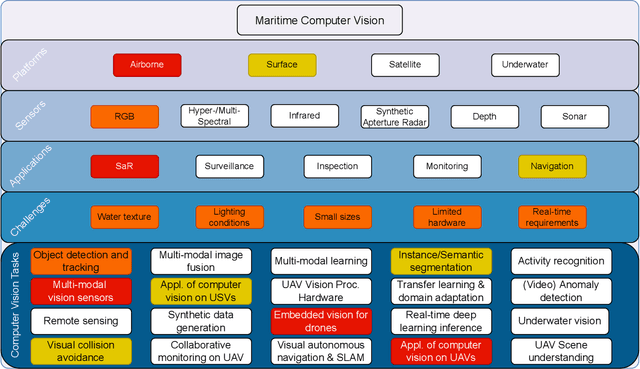
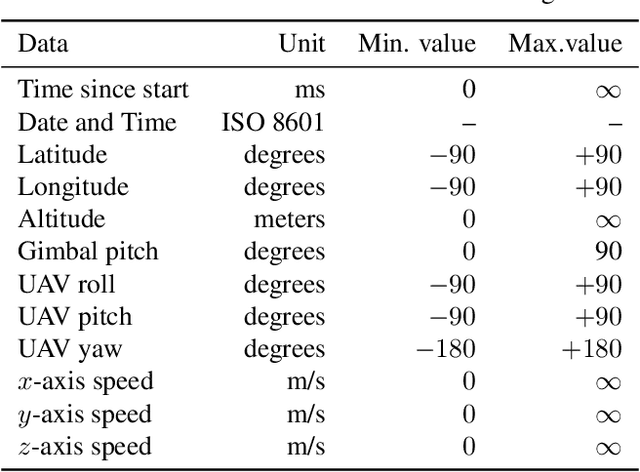
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.