 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfidence Boosts Trust-Based Resilience in Cooperative Multi-Robot Systems
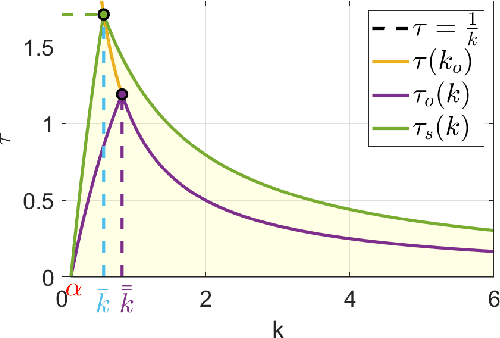
Jun 10, 2025Wireless communication-based multi-robot systems open the door to cyberattacks that can disrupt safety and performance of collaborative robots. The physical channel supporting inter-robot communication offers an attractive opportunity to decouple the detection of malicious robots from task-relevant data exchange between legitimate robots. Yet, trustworthiness indications coming from physical channels are uncertain and must be handled with this in mind. In this paper, we propose a resilient protocol for multi-robot operation wherein a parameter {\lambda}t accounts for how confident a robot is about the legitimacy of nearby robots that the physical channel indicates. Analytical results prove that our protocol achieves resilient coordination with arbitrarily many malicious robots under mild assumptions. Tuning {\lambda}t allows a designer to trade between near-optimal inter-robot coordination and quick task execution; see Fig. 1. This is a fundamental performance tradeoff and must be carefully evaluated based on the task at hand. The effectiveness of our approach is numerically verified with experiments involving platoons of autonomous cars where some vehicles are maliciously spoofed.
Personalized and Resilient Distributed Learning Through Opinion Dynamics
May 20, 2025In this paper, we address two practical challenges of distributed learning in multi-agent network systems, namely personalization and resilience. Personalization is the need of heterogeneous agents to learn local models tailored to their own data and tasks, while still generalizing well; on the other hand, the learning process must be resilient to cyberattacks or anomalous training data to avoid disruption. Motivated by a conceptual affinity between these two requirements, we devise a distributed learning algorithm that combines distributed gradient descent and the Friedkin-Johnsen model of opinion dynamics to fulfill both of them. We quantify its convergence speed and the neighborhood that contains the final learned models, which can be easily controlled by tuning the algorithm parameters to enforce a more personalized/resilient behavior. We numerically showcase the effectiveness of our algorithm on synthetic and real-world distributed learning tasks, where it achieves high global accuracy both for personalized models and with malicious agents compared to standard strategies.
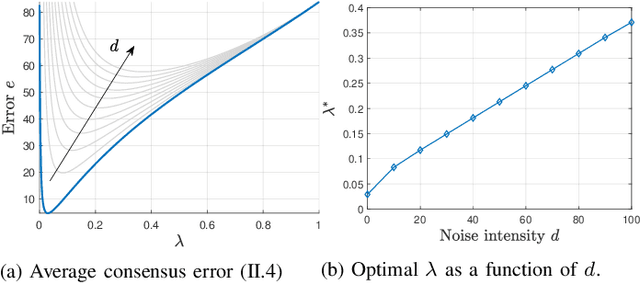
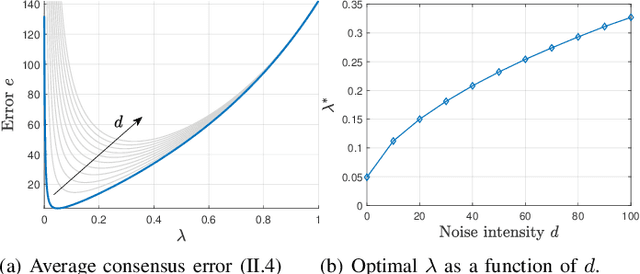
The Role of Confidence for Trust-based Resilient Consensus
Apr 11, 2024

We consider a multi-agent system where agents aim to achieve a consensus despite interactions with malicious agents that communicate misleading information. Physical channels supporting communication in cyberphysical systems offer attractive opportunities to detect malicious agents, nevertheless, trustworthiness indications coming from the channel are subject to uncertainty and need to be treated with this in mind. We propose a resilient consensus protocol that incorporates trust observations from the channel and weighs them with a parameter that accounts for how confident an agent is regarding its understanding of the legitimacy of other agents in the network, with no need for the initial observation window $T_0$ that has been utilized in previous works. Analytical and numerical results show that (i) our protocol achieves a resilient consensus in the presence of malicious agents and (ii) the steady-state deviation from nominal consensus can be minimized by a suitable choice of the confidence parameter that depends on the statistics of trust observations.
Safe Distributed Control of Multi-Robot Systems with Communication Delays
Feb 14, 2024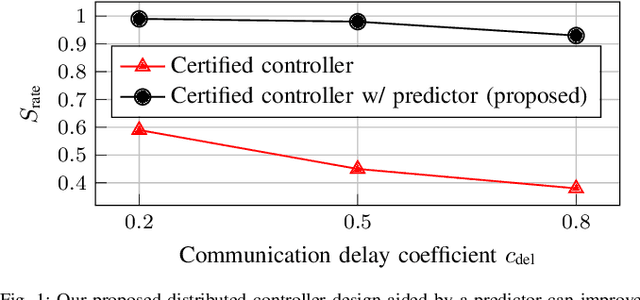
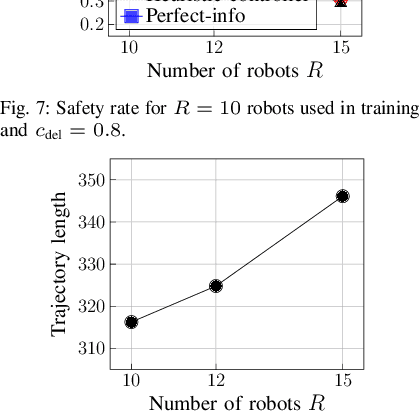
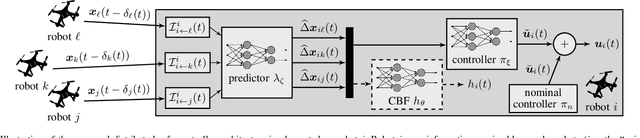
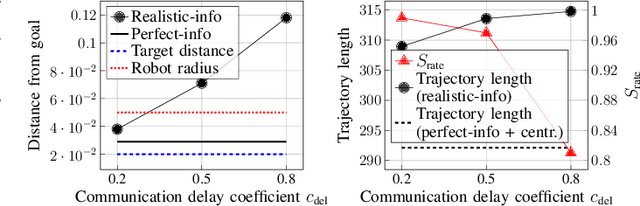
Safe operation of multi-robot systems is critical, especially in communication-degraded environments such as underwater for seabed mapping, underground caves for navigation, and in extraterrestrial missions for assembly and construction. We address safety of networked autonomous systems where the information exchanged between robots incurs communication delays. We formalize a notion of distributed control barrier function (CBF) for multi-robot systems, a safety certificate amenable to a distributed implementation, which provides formal ground to using graph neural networks to learn safe distributed controllers. Further, we observe that learning a distributed controller ignoring delays can severely degrade safety. Our main contribution is a predictor-based framework to train a safe distributed controller under communication delays, where the current state of nearby robots is predicted from received data and age-of-information. Numerical experiments on multi-robot collision avoidance show that our predictor-based approach can significantly improve the safety of a learned distributed controller under communication delays
VREM-FL: Mobility-Aware Computation-Scheduling Co-Design for Vehicular Federated Learning
Nov 30, 2023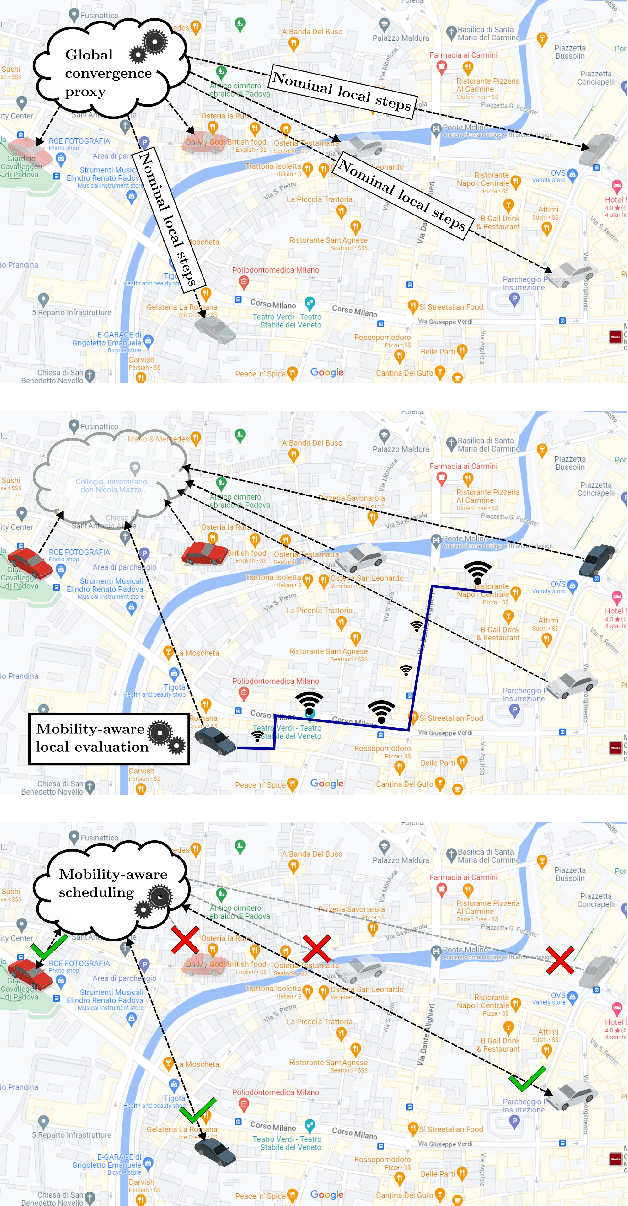


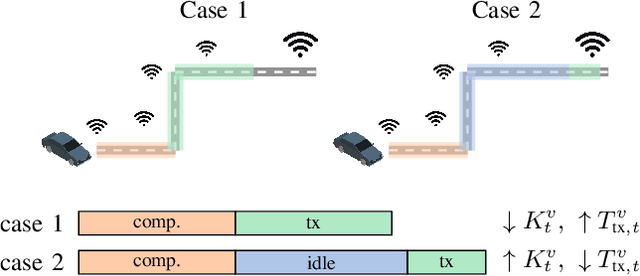
Assisted and autonomous driving are rapidly gaining momentum, and will soon become a reality. Among their key enablers, artificial intelligence and machine learning are expected to play a prominent role, also thanks to the massive amount of data that smart vehicles will collect from their onboard sensors. In this domain, federated learning is one of the most effective and promising techniques for training global machine learning models, while preserving data privacy at the vehicles and optimizing communications resource usage. In this work, we propose VREM-FL, a computation-scheduling co-design for vehicular federated learning that leverages mobility of vehicles in conjunction with estimated 5G radio environment maps. VREM-FL jointly optimizes the global model learned at the server while wisely allocating communication resources. This is achieved by orchestrating local computations at the vehicles in conjunction with the transmission of their local model updates in an adaptive and predictive fashion, by exploiting radio channel maps. The proposed algorithm can be tuned to trade model training time for radio resource usage. Experimental results demonstrate the efficacy of utilizing radio maps. VREM-FL outperforms literature benchmarks for both a linear regression model (learning time reduced by 28%) and a deep neural network for a semantic image segmentation task (doubling the number of model updates within the same time window).
D-Lite: Navigation-Oriented Compression of 3D Scene Graphs under Communication Constraints
Sep 21, 2022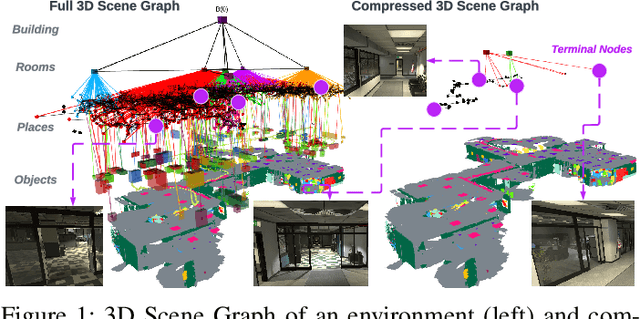
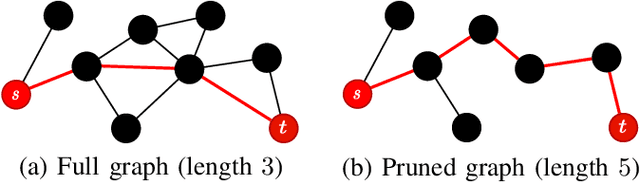
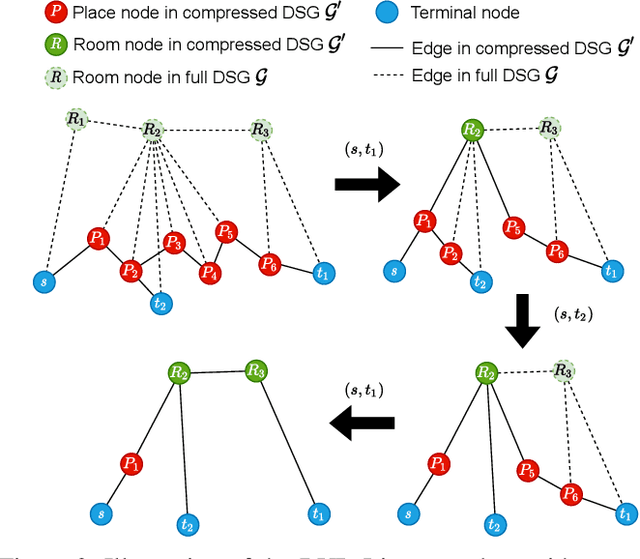
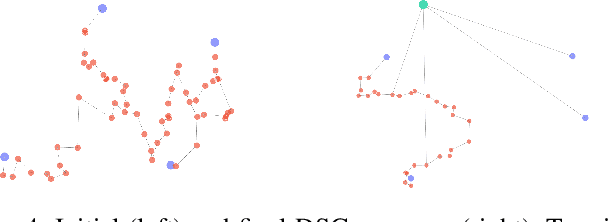
For a multi-robot team that collaboratively explores an unknown environment, it is of vital importance that collected information is efficiently shared among robots in order to support exploration and navigation tasks. Practical constraints of wireless channels, such as limited bandwidth and bit-rate, urge robots to carefully select information to be transmitted. In this paper, we consider the case where environmental information is modeled using a 3D Scene Graph, a hierarchical map representation that describes geometric and semantic aspects of the environment. Then, we leverage graph-theoretic tools, namely graph spanners, to design heuristic strategies that efficiently compress 3D Scene Graphs to enable communication under bandwidth constraints. Our compression strategies are navigation-oriented in that they are designed to approximately preserve shortest paths between locations of interest, while meeting a user-specified communication budget constraint. Effectiveness of the proposed algorithms is demonstrated via extensive numerical analysis and on synthetic robot navigation experiments in a realistic simulator. A video abstract is available at https://youtu.be/nKYXU5VC6A8.
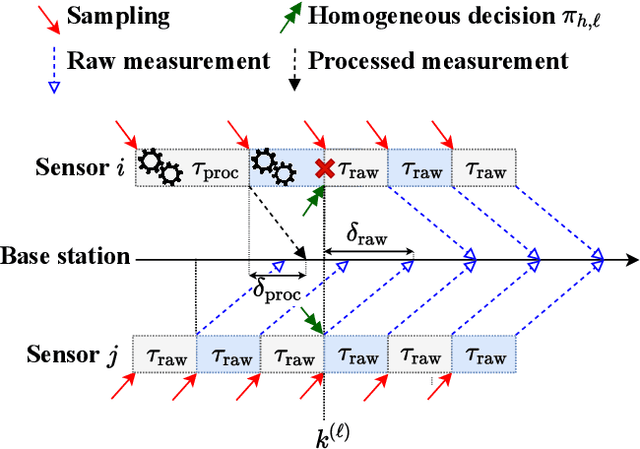
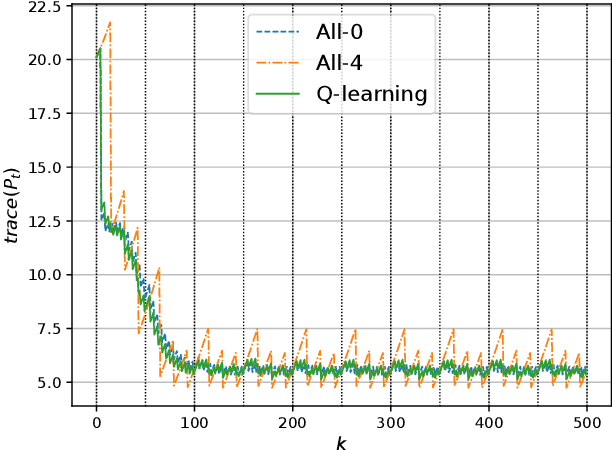
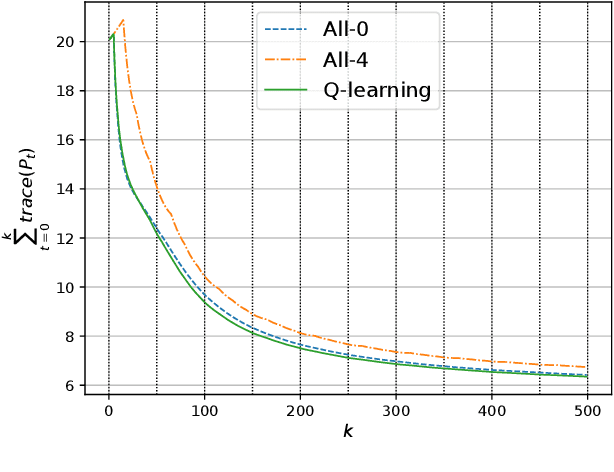
To Compute or not to Compute? Adaptive Smart Sensing in Resource-Constrained Edge Computing
Sep 05, 2022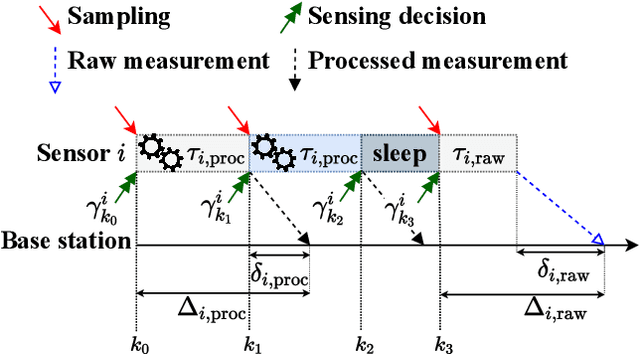
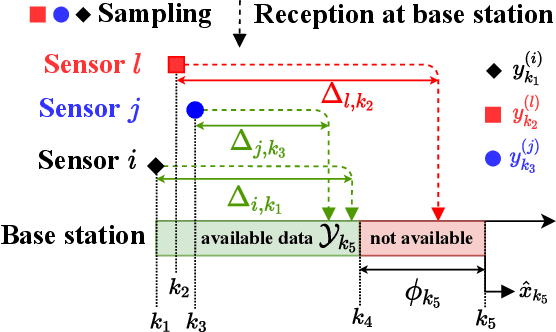

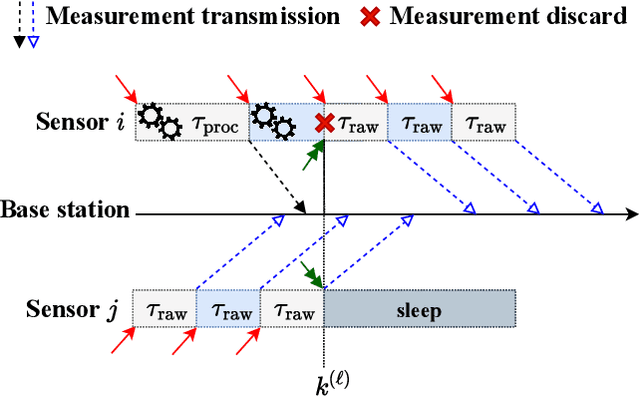
We consider a network of smart sensors for edge computing application that sample a signal of interest and send updates to a base station for remote global monitoring. Sensors are equipped with sensing and compute, and can either send raw data or process them on-board before transmission. Limited hardware resources at the edge generate a fundamental latency-accuracy trade-off: raw measurements are inaccurate but timely, whereas accurate processed updates are available after computational delay. Also, if sensor on-board processing entails data compression, latency caused by wireless communication might be higher for raw measurements. Hence, one needs to decide when sensors should transmit raw measurements or rely on local processing to maximize overall network performance. To tackle this sensing design problem, we model an estimation-theoretic optimization framework that embeds computation and communication delays, and propose a Reinforcement Learning-based approach to dynamically allocate computational resources at each sensor. Effectiveness of our proposed approach is validated through numerical simulations with case studies motivated by the Internet of Drones and self-driving vehicles.
Can Competition Outperform Collaboration? The Role of Malicious Agents
Jul 04, 2022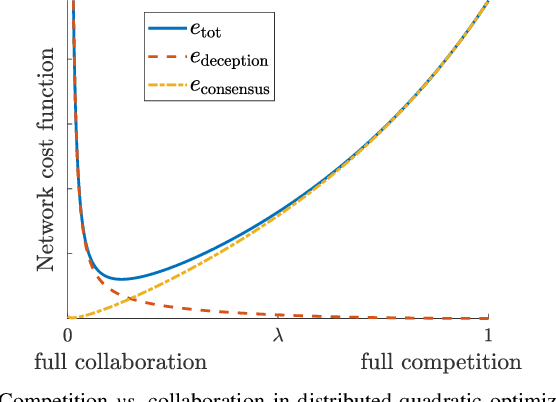

We investigate a novel approach to resilient distributed optimization with quadratic costs in a Networked Control System prone to exogenous attacks that make agents misbehave. In contrast with commonly adopted filtering strategies, we draw inspiration from a game-theoretic formulation of the consensus problem and argue that adding competition to the mix can improve resilience in the presence of malicious agents. Our intuition is corroborated by analytical and numerical results showing that (i) our strategy reveals a nontrivial performance trade-off between full collaboration and full competition, and (ii) such competitionbased approach can outperform state-of-the-art algorithms based on Mean Subsequence Reduced. Finally, we study impact of communication topology and connectivity on performance, pointing out insights to robust network design.
A Reinforcement Learning Approach to Sensing Design in Resource-Constrained Wireless Networked Control Systems
Apr 05, 2022
In this paper, we consider a wireless network of smart sensors (agents) that monitor a dynamical process and send measurements to a base station that performs global monitoring and decision-making. Smart sensors are equipped with both sensing and computation, and can either send raw measurements or process them prior to transmission. Constrained agent resources raise a fundamental latency-accuracy trade-off. On the one hand, raw measurements are inaccurate but fast to produce. On the other hand, data processing on resource-constrained platforms generates accurate measurements at the cost of non-negligible computation latency. Further, if processed data are also compressed, latency caused by wireless communication might be higher for raw measurements. Hence, it is challenging to decide when and where sensors in the network should transmit raw measurements or leverage time-consuming local processing. To tackle this design problem, we propose a Reinforcement Learning approach to learn an efficient policy that dynamically decides when measurements are to be processed at each sensor. Effectiveness of our proposed approach is validated through a numerical simulation with case study on smart sensing motivated by the Internet of Drones.
Coordinated Multi-Robot Trajectory Tracking over Sampled Communication
Dec 03, 2021
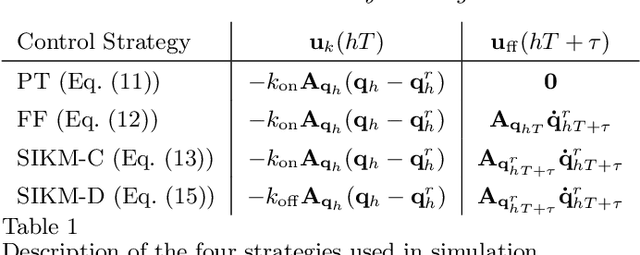
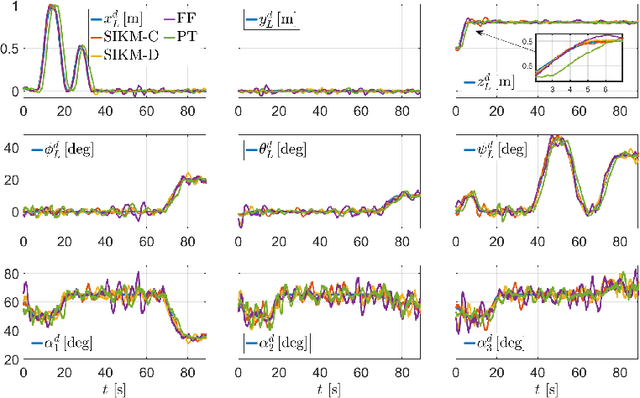
In this paper, we propose an inverse-kinematics controller for a class of multi-robot systems in the scenario of sampled communication. The goal is to make a group of robots perform trajectory tracking {in a coordinated way} when the sampling time of communications is non-negligible, disrupting the theoretical convergence guarantees of standard control designs. Given a feasible desired trajectory in the configuration space, the proposed controller receives measurements from the system at sampled time instants and computes velocity references for the robots, which are tracked by a low-level controller. We propose a jointly designed feedback plus feedforward controller with provable stability and error convergence guarantees, and further show that the obtained controller is amenable of decentralized implementation. We test the proposed control strategy via numerical simulations in the scenario of cooperative aerial manipulation of a cable-suspended load using a realistic simulator (Fly-Crane). Finally, we compare our proposed decentralized controller with centralized approaches that adapt the feedback gain online through smart heuristics, and show that it achieves comparable performance.