 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Distributed Control of Multi-Robot Systems with Communication Delays
Paper and Code
Feb 14, 2024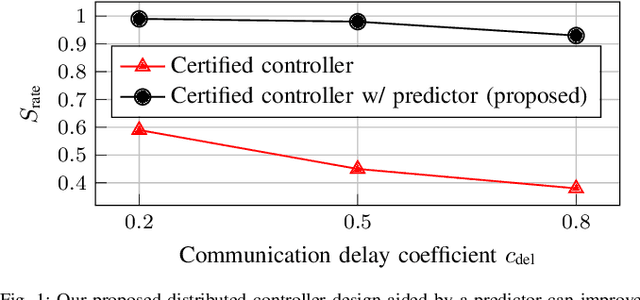
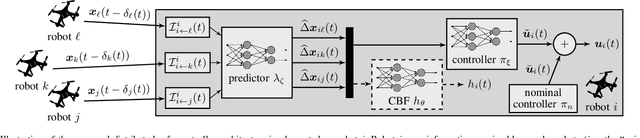
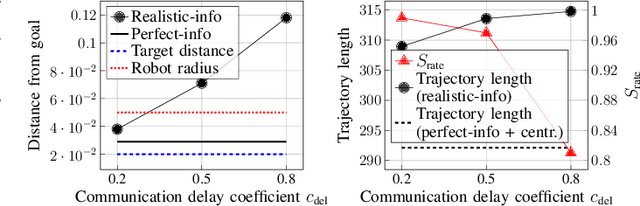
Safe operation of multi-robot systems is critical, especially in communication-degraded environments such as underwater for seabed mapping, underground caves for navigation, and in extraterrestrial missions for assembly and construction. We address safety of networked autonomous systems where the information exchanged between robots incurs communication delays. We formalize a notion of distributed control barrier function (CBF) for multi-robot systems, a safety certificate amenable to a distributed implementation, which provides formal ground to using graph neural networks to learn safe distributed controllers. Further, we observe that learning a distributed controller ignoring delays can severely degrade safety. Our main contribution is a predictor-based framework to train a safe distributed controller under communication delays, where the current state of nearby robots is predicted from received data and age-of-information. Numerical experiments on multi-robot collision avoidance show that our predictor-based approach can significantly improve the safety of a learned distributed controller under communication delays