 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenMRP: A Generative Multi-Route Planning Framework for Efficient and Personalized Real-Time Industrial Navigation
Feb 04, 2026Existing industrial-scale navigation applications contend with massive road networks, typically employing two main categories of approaches for route planning. The first relies on precomputed road costs for optimal routing and heuristic algorithms for generating alternatives, while the second, generative methods, has recently gained significant attention. However, the former struggles with personalization and route diversity, while the latter fails to meet the efficiency requirements of large-scale real-time scenarios. To address these limitations, we propose GenMRP, a generative framework for multi-route planning. To ensure generation efficiency, GenMRP first introduces a skeleton-to-capillary approach that dynamically constructs a relevant sub-network significantly smaller than the full road network. Within this sub-network, routes are generated iteratively. The first iteration identifies the optimal route, while the subsequent ones generate alternatives that balance quality and diversity using the newly proposed correctional boosting approach. Each iteration incorporates road features, user historical sequences, and previously generated routes into a Link Cost Model to update road costs, followed by route generation using the Dijkstra algorithm. Extensive experiments show that GenMRP achieves state-of-the-art performance with high efficiency in both offline and online environments. To facilitate further research, we have publicly released the training and evaluation dataset. GenMRP has been fully deployed in a real-world navigation app, demonstrating its effectiveness and benefits.
SCASRec: A Self-Correcting and Auto-Stopping Model for Generative Route List Recommendation
Feb 03, 2026Route recommendation systems commonly adopt a multi-stage pipeline involving fine-ranking and re-ranking to produce high-quality ordered recommendations. However, this paradigm faces three critical limitations. First, there is a misalignment between offline training objectives and online metrics. Offline gains do not necessarily translate to online improvements. Actual performance must be validated through A/B testing, which may potentially compromise the user experience. Second, redundancy elimination relies on rigid, handcrafted rules that lack adaptability to the high variance in user intent and the unstructured complexity of real-world scenarios. Third, the strict separation between fine-ranking and re-ranking stages leads to sub-optimal performance. Since each module is optimized in isolation, the fine-ranking stage remains oblivious to the list-level objectives (e.g., diversity) targeted by the re-ranker, thereby preventing the system from achieving a jointly optimized global optimum. To overcome these intertwined challenges, we propose \textbf{SCASRec} (\textbf{S}elf-\textbf{C}orrecting and \textbf{A}uto-\textbf{S}topping \textbf{Rec}ommendation), a unified generative framework that integrates ranking and redundancy elimination into a single end-to-end process. SCASRec introduces a stepwise corrective reward (SCR) to guide list-wise refinement by focusing on hard samples, and employs a learnable End-of-Recommendation (EOR) token to terminate generation adaptively when no further improvement is expected. Experiments on two large-scale, open-sourced route recommendation datasets demonstrate that SCASRec establishes an SOTA in offline and online settings. SCASRec has been fully deployed in a real-world navigation app, demonstrating its effectiveness.
Comprehensive Comparison Network: a framework for locality-aware, routes-comparable and interpretable route recommendation
Aug 12, 2025Route recommendation (RR) is a core task of route planning in the Amap app, with the goal of recommending the optimal route among candidate routes to users. Unlike traditional recommendation methods, insights into the local quality of routes and comparisons between candidate routes are crucial for enhancing recommendation performance but often overlooked in previous studies. To achieve these, we propose a novel model called Comprehensive Comparison Network (CCN). CCN not only uses query-level features (e.g. user features) and item-level features (e.g. route features, item embedding) that are common in traditional recommendations, but also introduces comparison-level features which describe the non-overlapping segments between different routes to capture the local quality of routes. The key component Comprehensive Comparison Block (CCB) in CCN is designed to enable comparisons between routes. CCB includes a Comprehensive Comparison Operator (CCO) and a multi-scenario MLP, which can update the representations of candidate routes based on a comprehensive comparison. By stacking multiple CCBs, CCN can determine the final scores of candidate routes and recommend the optimal one to the user. Additionally, since routes directly affect the costs and risks experienced by users, the RR model must be interpretable for online deployment. Therefore, we designed an interpretable pair scoring network to achieve interpretability. Both offline and online experiments demonstrate that CCN significantly improves RR performance and exhibits strong interpretability. CCN has been fully deployed in the Amap app for over a year, providing stable and optimal benefits for route recommendations.
Arti-PG: A Toolbox for Procedurally Synthesizing Large-Scale and Diverse Articulated Objects with Rich Annotations
Dec 19, 2024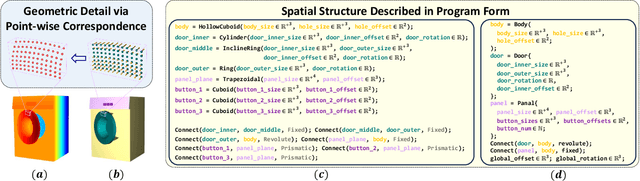



The acquisition of substantial volumes of 3D articulated object data is expensive and time-consuming, and consequently the scarcity of 3D articulated object data becomes an obstacle for deep learning methods to achieve remarkable performance in various articulated object understanding tasks. Meanwhile, pairing these object data with detailed annotations to enable training for various tasks is also difficult and labor-intensive to achieve. In order to expeditiously gather a significant number of 3D articulated objects with comprehensive and detailed annotations for training, we propose Articulated Object Procedural Generation toolbox, a.k.a. Arti-PG toolbox. Arti-PG toolbox consists of i) descriptions of articulated objects by means of a generalized structure program along with their analytic correspondence to the objects' point cloud, ii) procedural rules about manipulations on the structure program to synthesize large-scale and diverse new articulated objects, and iii) mathematical descriptions of knowledge (e.g. affordance, semantics, etc.) to provide annotations to the synthesized object. Arti-PG has two appealing properties for providing training data for articulated object understanding tasks: i) objects are created with unlimited variations in shape through program-oriented structure manipulation, ii) Arti-PG is widely applicable to diverse tasks by easily providing comprehensive and detailed annotations. Arti-PG now supports the procedural generation of 26 categories of articulate objects and provides annotations across a wide range of both vision and manipulation tasks, and we provide exhaustive experiments which fully demonstrate its advantages. We will make Arti-PG toolbox publicly available for the community to use.
ConceptFactory: Facilitate 3D Object Knowledge Annotation with Object Conceptualization
Nov 01, 2024We present ConceptFactory, a novel scope to facilitate more efficient annotation of 3D object knowledge by recognizing 3D objects through generalized concepts (i.e. object conceptualization), aiming at promoting machine intelligence to learn comprehensive object knowledge from both vision and robotics aspects. This idea originates from the findings in human cognition research that the perceptual recognition of objects can be explained as a process of arranging generalized geometric components (e.g. cuboids and cylinders). ConceptFactory consists of two critical parts: i) ConceptFactory Suite, a unified toolbox that adopts Standard Concept Template Library (STL-C) to drive a web-based platform for object conceptualization, and ii) ConceptFactory Asset, a large collection of conceptualized objects acquired using ConceptFactory suite. Our approach enables researchers to effortlessly acquire or customize extensive varieties of object knowledge to comprehensively study different object understanding tasks. We validate our idea on a wide range of benchmark tasks from both vision and robotics aspects with state-of-the-art algorithms, demonstrating the high quality and versatility of annotations provided by our approach. Our website is available at https://apeirony.github.io/ConceptFactory.
Discovering Conceptual Knowledge with Analytic Ontology Templates for Articulated Objects
Sep 18, 2024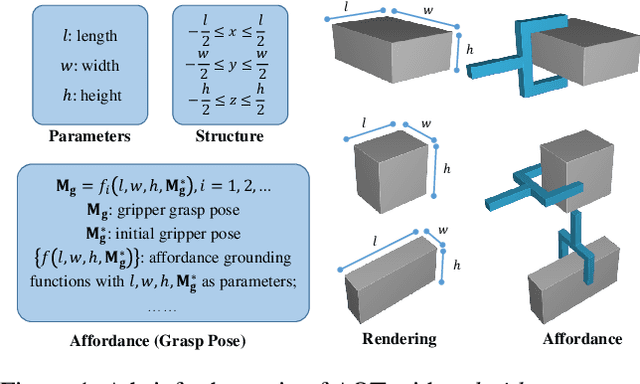


Human cognition can leverage fundamental conceptual knowledge, like geometric and kinematic ones, to appropriately perceive, comprehend and interact with novel objects. Motivated by this finding, we aim to endow machine intelligence with an analogous capability through performing at the conceptual level, in order to understand and then interact with articulated objects, especially for those in novel categories, which is challenging due to the intricate geometric structures and diverse joint types of articulated objects. To achieve this goal, we propose Analytic Ontology Template (AOT), a parameterized and differentiable program description of generalized conceptual ontologies. A baseline approach called AOTNet driven by AOTs is designed accordingly to equip intelligent agents with these generalized concepts, and then empower the agents to effectively discover the conceptual knowledge on the structure and affordance of articulated objects. The AOT-driven approach yields benefits in three key perspectives: i) enabling concept-level understanding of articulated objects without relying on any real training data, ii) providing analytic structure information, and iii) introducing rich affordance information indicating proper ways of interaction. We conduct exhaustive experiments and the results demonstrate the superiority of our approach in understanding and then interacting with articulated objects.
DSFNet: Learning Disentangled Scenario Factorization for Multi-Scenario Route Ranking
Mar 30, 2024



Multi-scenario route ranking (MSRR) is crucial in many industrial mapping systems. However, the industrial community mainly adopts interactive interfaces to encourage users to select pre-defined scenarios, which may hinder the downstream ranking performance. In addition, in the academic community, the multi-scenario ranking works only come from other fields, and there are no works specifically focusing on route data due to lacking a publicly available MSRR dataset. Moreover, all the existing multi-scenario works still fail to address the three specific challenges of MSRR simultaneously, i.e. explosion of scenario number, high entanglement, and high-capacity demand. Different from the prior, to address MSRR, our key idea is to factorize the complicated scenario in route ranking into several disentangled factor scenario patterns. Accordingly, we propose a novel method, Disentangled Scenario Factorization Network (DSFNet), which flexibly composes scenario-dependent parameters based on a high-capacity multi-factor-scenario-branch structure. Then, a novel regularization is proposed to induce the disentanglement of factor scenarios. Furthermore, two extra novel techniques, i.e. scenario-aware batch normalization and scenario-aware feature filtering, are developed to improve the network awareness of scenario representation. Additionally, to facilitate MSRR research in the academic community, we propose MSDR, the first large-scale publicly available annotated industrial Multi-Scenario Driving Route dataset. Comprehensive experimental results demonstrate the superiority of our DSFNet, which has been successfully deployed in AMap to serve the major online traffic.
A General Framework for Debiasing in CTR Prediction
Dec 06, 2021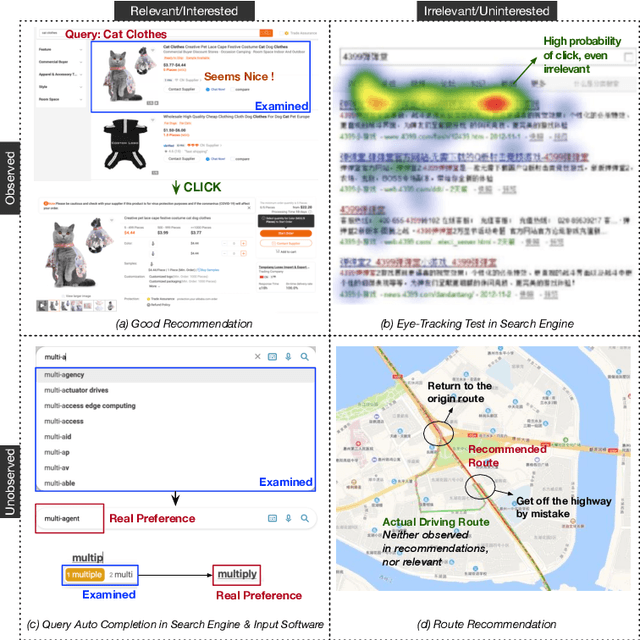

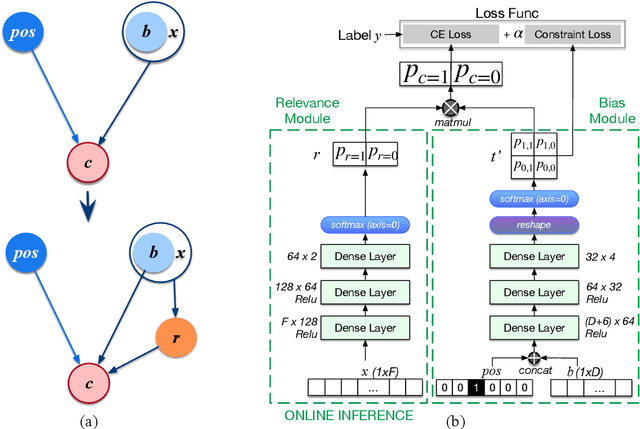
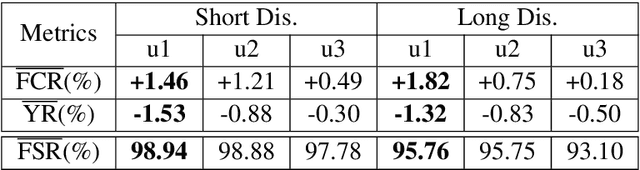
Most of the existing methods for debaising in click-through rate (CTR) prediction depend on an oversimplified assumption, i.e., the click probability is the product of observation probability and relevance probability. However, since there is a complicated interplay between these two probabilities, these methods cannot be applied to other scenarios, e.g. query auto completion (QAC) and route recommendation. We propose a general debiasing framework without simplifying the relationships between variables, which can handle all scenarios in CTR prediction. Simulation experiments show that: under the simplest scenario, our method maintains a similar AUC with the state-of-the-art methods; in other scenarios, our method achieves considerable improvements compared with existing methods. Meanwhile, in online experiments, the framework also gains significant improvements consistently.
R4: A Framework for Route Representation and Route Recommendation
Oct 25, 2021
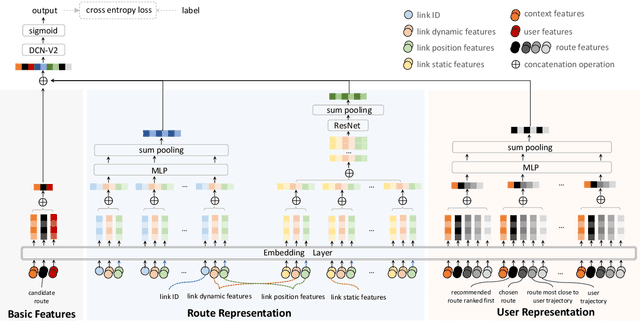

Route recommendation is significant in navigation service. Two major challenges for route recommendation are route representation and user representation. Different from items that can be identified by unique IDs in traditional recommendation, routes are combinations of links (i.e., a road segment and its following action like turning left) and the number of combinations could be close to infinite. Besides, the representation of a route changes under different scenarios. These facts result in severe sparsity of routes, which increases the difficulty of route representation. Moreover, link attribute deficiencies and errors affect preciseness of route representation. Because of the sparsity of routes, the interaction data between users and routes are also sparse. This makes it not easy to acquire user representation from historical user-item interactions as traditional recommendations do. To address these issues, we propose a novel learning framework R4. In R4, we design a sparse & dense network to obtain representations of routes. The sparse unit learns link ID embeddings and aggregates them to represent a route, which captures implicit route characteristics and subsequently alleviates problems caused by link attribute deficiencies and errors. The dense unit extracts implicit local features of routes from link attributes. For user representation, we utilize a series of historical navigation to extract user preference. R4 achieves remarkable performance in both offline and online experiments.