 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArti-PG: A Toolbox for Procedurally Synthesizing Large-Scale and Diverse Articulated Objects with Rich Annotations
Dec 19, 2024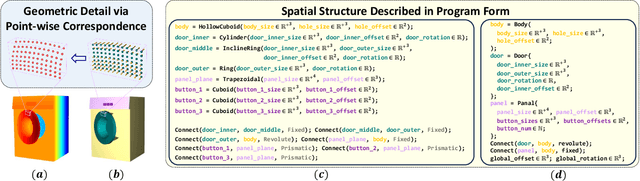



The acquisition of substantial volumes of 3D articulated object data is expensive and time-consuming, and consequently the scarcity of 3D articulated object data becomes an obstacle for deep learning methods to achieve remarkable performance in various articulated object understanding tasks. Meanwhile, pairing these object data with detailed annotations to enable training for various tasks is also difficult and labor-intensive to achieve. In order to expeditiously gather a significant number of 3D articulated objects with comprehensive and detailed annotations for training, we propose Articulated Object Procedural Generation toolbox, a.k.a. Arti-PG toolbox. Arti-PG toolbox consists of i) descriptions of articulated objects by means of a generalized structure program along with their analytic correspondence to the objects' point cloud, ii) procedural rules about manipulations on the structure program to synthesize large-scale and diverse new articulated objects, and iii) mathematical descriptions of knowledge (e.g. affordance, semantics, etc.) to provide annotations to the synthesized object. Arti-PG has two appealing properties for providing training data for articulated object understanding tasks: i) objects are created with unlimited variations in shape through program-oriented structure manipulation, ii) Arti-PG is widely applicable to diverse tasks by easily providing comprehensive and detailed annotations. Arti-PG now supports the procedural generation of 26 categories of articulate objects and provides annotations across a wide range of both vision and manipulation tasks, and we provide exhaustive experiments which fully demonstrate its advantages. We will make Arti-PG toolbox publicly available for the community to use.
ConceptFactory: Facilitate 3D Object Knowledge Annotation with Object Conceptualization
Nov 01, 2024We present ConceptFactory, a novel scope to facilitate more efficient annotation of 3D object knowledge by recognizing 3D objects through generalized concepts (i.e. object conceptualization), aiming at promoting machine intelligence to learn comprehensive object knowledge from both vision and robotics aspects. This idea originates from the findings in human cognition research that the perceptual recognition of objects can be explained as a process of arranging generalized geometric components (e.g. cuboids and cylinders). ConceptFactory consists of two critical parts: i) ConceptFactory Suite, a unified toolbox that adopts Standard Concept Template Library (STL-C) to drive a web-based platform for object conceptualization, and ii) ConceptFactory Asset, a large collection of conceptualized objects acquired using ConceptFactory suite. Our approach enables researchers to effortlessly acquire or customize extensive varieties of object knowledge to comprehensively study different object understanding tasks. We validate our idea on a wide range of benchmark tasks from both vision and robotics aspects with state-of-the-art algorithms, demonstrating the high quality and versatility of annotations provided by our approach. Our website is available at https://apeirony.github.io/ConceptFactory.