 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMethodological Explainability Evaluation of an Interpretable Deep Learning Model for Post-Hepatectomy Liver Failure Prediction Incorporating Counterfactual Explanations and Layerwise Relevance Propagation: A Prospective In Silico Trial
Aug 07, 2024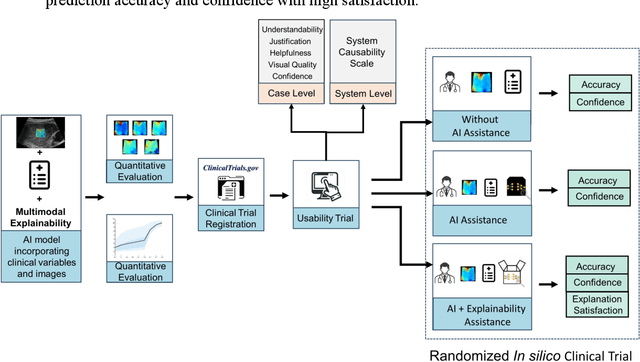
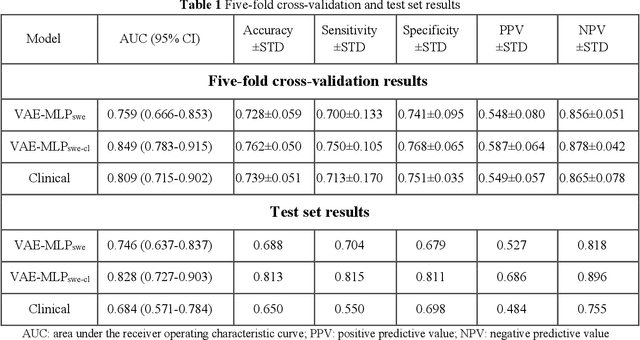
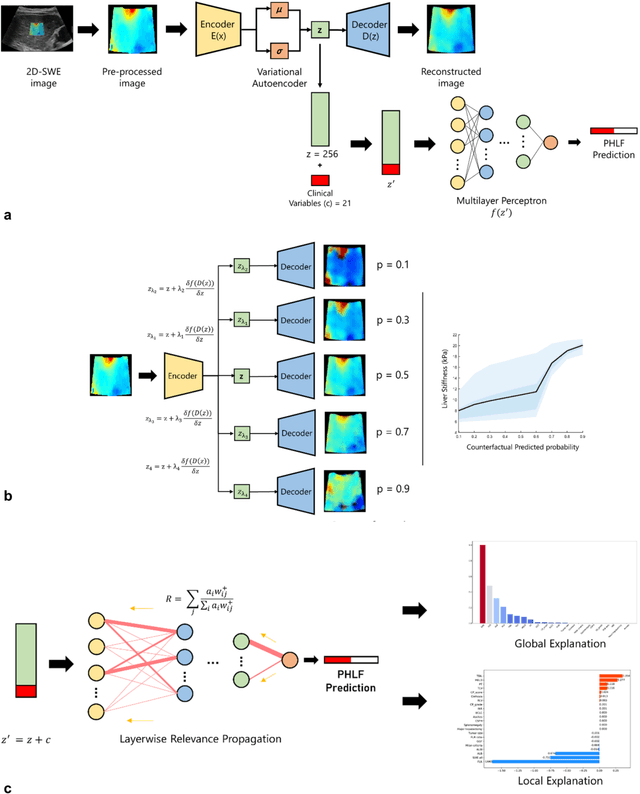
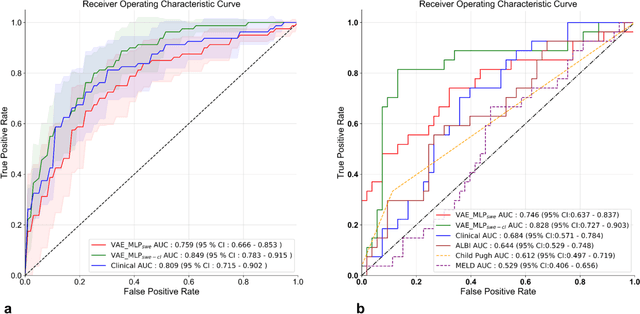
Artificial intelligence (AI)-based decision support systems have demonstrated value in predicting post-hepatectomy liver failure (PHLF) in hepatocellular carcinoma (HCC). However, they often lack transparency, and the impact of model explanations on clinicians' decisions has not been thoroughly evaluated. Building on prior research, we developed a variational autoencoder-multilayer perceptron (VAE-MLP) model for preoperative PHLF prediction. This model integrated counterfactuals and layerwise relevance propagation (LRP) to provide insights into its decision-making mechanism. Additionally, we proposed a methodological framework for evaluating the explainability of AI systems. This framework includes qualitative and quantitative assessments of explanations against recognized biomarkers, usability evaluations, and an in silico clinical trial. Our evaluations demonstrated that the model's explanation correlated with established biomarkers and exhibited high usability at both the case and system levels. Furthermore, results from the three-track in silico clinical trial showed that clinicians' prediction accuracy and confidence increased when AI explanations were provided.
Motion Control of Two Mobile Robots under Allowable Collisions
Nov 15, 2023This letter investigates the motion control problem of two mobile robots under allowable collisions. Here, the allowable collisions mean that the collisions do not damage the mobile robots. The occurrence of the collisions is discussed and the effects of the collisions on the mobile robots are analyzed to develop a hybrid model of each mobile robot under allowable collisions. Based on the effects of the collisions, we show the necessity of redesigning the motion control strategy for mobile robots. Furthermore, impulsive control techniques are applied to redesign the motion control strategy to guarantee the task accomplishment for each mobile robot. Finally, an example is used to illustrate the redesigned motion control strategy.
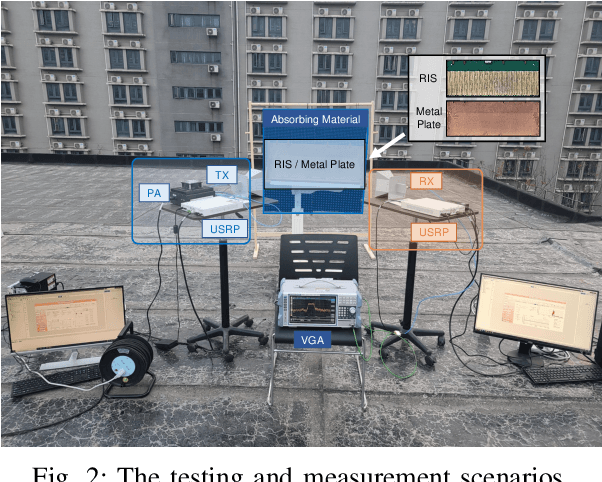
Multi-user beamforming in RIS-aided communications and experimental validations
Sep 18, 2023



Reconfigurable intelligent surface (RIS) is a promising technology for future wireless communications due to its capability of optimizing the propagation environments. Nevertheless, in literature, there are few prototypes serving multiple users. In this paper, we propose a whole flow of channel estimation and beamforming design for RIS, and set up an RIS-aided multi-user system for experimental validations. Specifically, we combine a channel sparsification step with generalized approximate message passing (GAMP) algorithm, and propose to generate the measurement matrix as Rademacher distribution to obtain the channel state information (CSI). To generate the reflection coefficients with the aim of maximizing the spectral efficiency, we propose a quadratic transform-based low-rank multi-user beamforming (QTLM) algorithm. Our proposed algorithms exploit the sparsity and low-rank properties of the channel, which has the advantages of light calculation and fast convergence. Based on the universal software radio peripheral devices, we built a complete testbed working at 5.8GHz and implemented all the proposed algorithms to verify the possibility of RIS assisting multi-user systems. Experimental results show that the system has obtained an average spectral efficiency increase of 13.48bps/Hz, with respective received power gains of 26.6dB and 17.5dB for two users, compared with the case when RIS is powered-off.
Dense Voxel 3D Reconstruction Using a Monocular Event Camera
Sep 01, 2023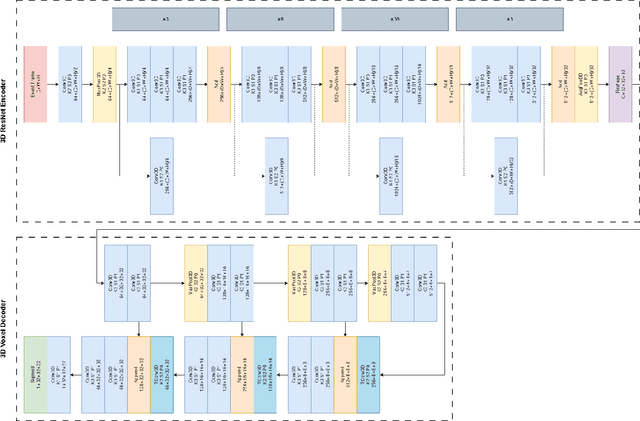
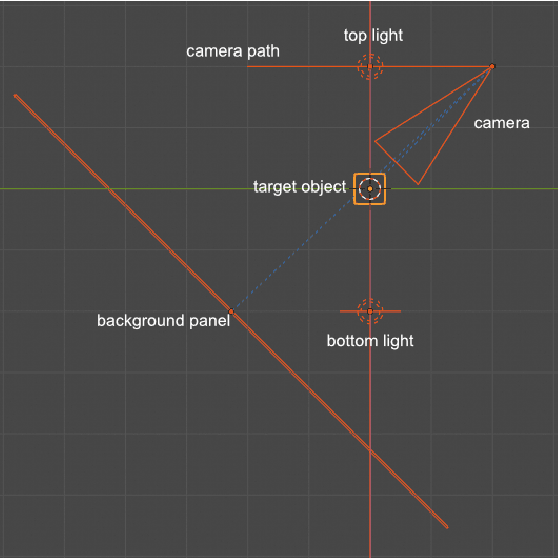
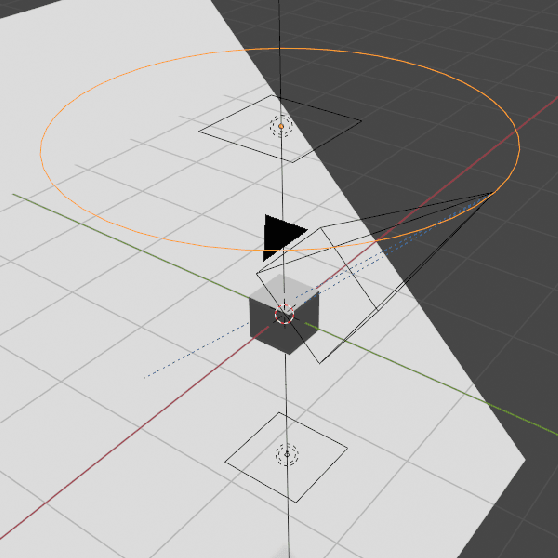
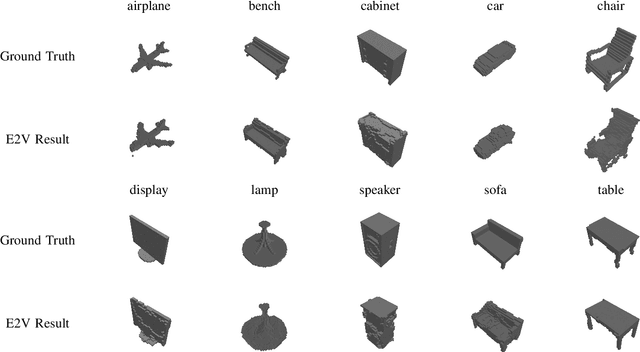
Event cameras are sensors inspired by biological systems that specialize in capturing changes in brightness. These emerging cameras offer many advantages over conventional frame-based cameras, including high dynamic range, high frame rates, and extremely low power consumption. Due to these advantages, event cameras have increasingly been adapted in various fields, such as frame interpolation, semantic segmentation, odometry, and SLAM. However, their application in 3D reconstruction for VR applications is underexplored. Previous methods in this field mainly focused on 3D reconstruction through depth map estimation. Methods that produce dense 3D reconstruction generally require multiple cameras, while methods that utilize a single event camera can only produce a semi-dense result. Other single-camera methods that can produce dense 3D reconstruction rely on creating a pipeline that either incorporates the aforementioned methods or other existing Structure from Motion (SfM) or Multi-view Stereo (MVS) methods. In this paper, we propose a novel approach for solving dense 3D reconstruction using only a single event camera. To the best of our knowledge, our work is the first attempt in this regard. Our preliminary results demonstrate that the proposed method can produce visually distinguishable dense 3D reconstructions directly without requiring pipelines like those used by existing methods. Additionally, we have created a synthetic dataset with $39,739$ object scans using an event camera simulator. This dataset will help accelerate other relevant research in this field.
Prototyping and real-world field trials of RIS-aided wireless communications
Aug 07, 2023



Reconfigurable intelligent surface (RIS) is a promising technology that has the potential to change the way we interact with the wireless propagating environment. In this paper, we design and fabricate an RIS system that can be used in the fifth generation (5G) mobile communication networks. We also propose a practical two-step spatial-oversampling codebook algorithm for the beamforming of RIS, which is based on the spatial structure of the wireless channel. This algorithm has much lower complexity compared to the two-dimensional full-space searching-based codebook, yet with only negligible performance loss. Then, a series of experiments are conducted with the fabricated RIS systems, covering the office, corridor, and outdoor environments, in order to verified the effectiveness of RIS in both laboratory and current 5G commercial networks. In the office and corridor scenarios, the 5.8 GHz RIS provided a 10-20 dB power gain at the receiver. In the outdoor test, over 35 dB power gain was observed with RIS compared to the non-deployment case. However, in commercial 5G networks, the 2.6 GHz RIS improved indoor signal strength by only 4-7 dB. The experimental results indicate that RIS achieves higher power gain when transceivers are equipped with directional antennas instead of omni-directional antennas.
RIS with insufficient phase shifting capability: Modeling, beamforming, and experimental validations
Jul 05, 2023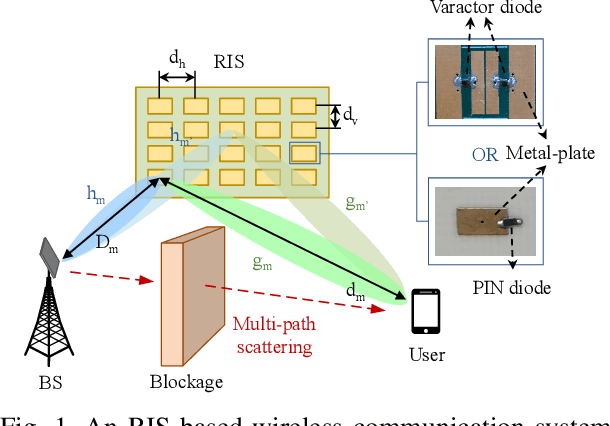
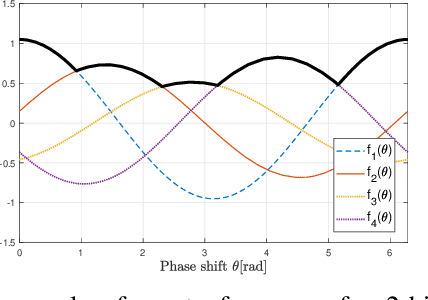
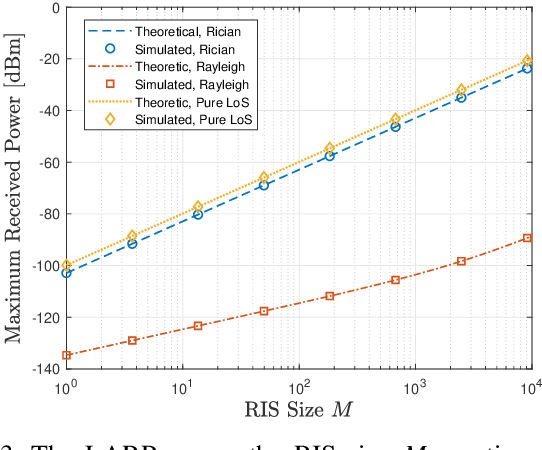
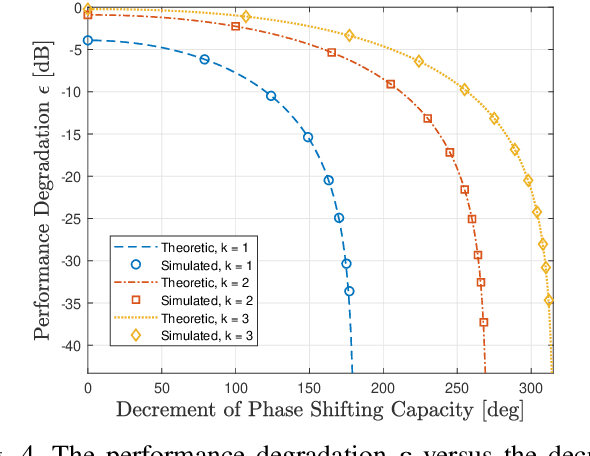
Most research works on reconfigurable intelligent surfaces (RIS) rely on idealized model of the reflection coefficients, i.e., uniform reflection amplitude for any phases and sufficient phase shifting capability. In practice however, such models are oversimplified. This paper introduces a realistic reflection coefficient model for RIS based on measurements. The reflection coefficients are modeled as discrete complex values that have non-uniform amplitudes and suffer from insufficient phase shift capability. We then propose a group-based query algorithm that takes the imperfect coefficients into consideration while calculating the reflection coefficients. We analyze the performance of the proposed algorithm, and derive the closed-form expressions to characterize the received power of an RIS-aided wireless communication system. The performance gains of the proposed algorithm are confirmed in simulations. Furthermore, we validate the proposed theoretical results by experiments with our fabricated RIS prototype systems. The simulation and measurement results match well with the theoretical analysis.
RIS-aided Wireless Communications: Can RIS Beat Metal Plate?
Mar 06, 2023

Reconfigurable Intelligent Surface (RIS) has recently been regarded as a paradigm-shifting technology beyond 5G, for its flexibility on smartly adjusting the response to the impinging electromagnetic (EM) waves. Usually, RIS can be implemented by properly reconfiguring the adjustable parameters of each RIS unit to align the signal phase on the receiver side. And it is believed that the phase alignment can be also mechanically achieved by a metal plate with the same physical size. However, we found in the prototype experiments that, a well-rotated metal plate can only approximately perform as well as RIS under limited conditions, although its scattering efficiency is relatively higher. When it comes to the case of spherical wave impinging, RIS outperforms the metal plate even beyond the receiving near-field regions. We analyze this phenomenon with wave optics theory and propose explicit scattering models for both the metal plate and RIS in general scenarios. Finally, the models are validated by simulations and field measurements.
Region-enhanced Deep Graph Convolutional Networks for Rumor Detection
Jun 22, 2022Social media has been rapidly developing in the public sphere due to its ease of spreading new information, which leads to the circulation of rumors. However, detecting rumors from such a massive amount of information is becoming an increasingly arduous challenge. Previous work generally obtained valuable features from propagation information. It should be noted that most methods only target the propagation structure while ignoring the rumor transmission pattern. This limited focus severely restricts the collection of spread data. To solve this problem, the authors of the present study are motivated to explore the regionalized propagation patterns of rumors. Specifically, a novel region-enhanced deep graph convolutional network (RDGCN) that enhances the propagation features of rumors by learning regionalized propagation patterns and trains to learn the propagation patterns by unsupervised learning is proposed. In addition, a source-enhanced residual graph convolution layer (SRGCL) is designed to improve the graph neural network (GNN) oversmoothness and increase the depth limit of the rumor detection methods-based GNN. Experiments on Twitter15 and Twitter16 show that the proposed model performs better than the baseline approach on rumor detection and early rumor detection.
Multimodal Dual Emotion with Fusion of Visual Sentiment for Rumor Detection
Apr 25, 2022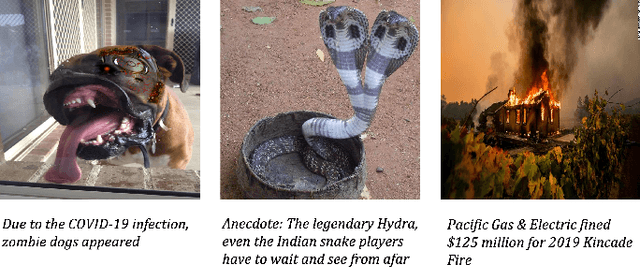
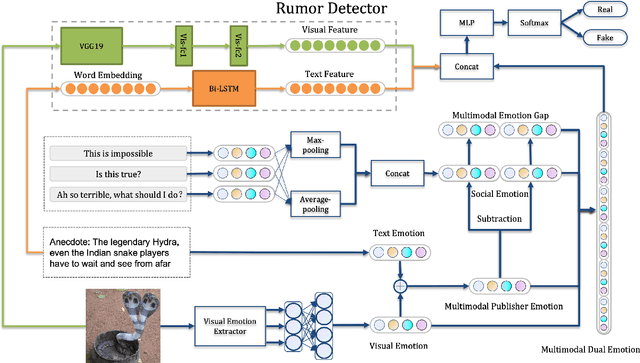
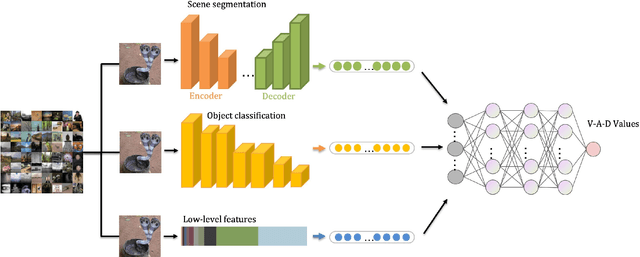
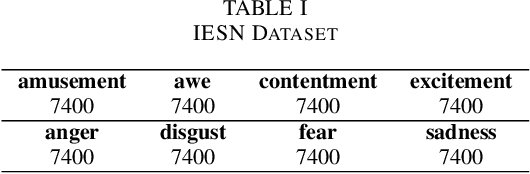
In recent years, rumors have had a devastating impact on society, making rumor detection a significant challenge. However, the studies on rumor detection ignore the intense emotions of images in the rumor content. This paper verifies that the image emotion improves the rumor detection efficiency. A Multimodal Dual Emotion feature in rumor detection, which consists of visual and textual emotions, is proposed. To the best of our knowledge, this is the first study which uses visual emotion in rumor detection. The experiments on real datasets verify that the proposed features outperform the state-of-the-art sentiment features, and can be extended in rumor detectors while improving their performance.
A 3D Positioning-based Channel Estimation Method for RIS-aided mmWave Communications
Mar 29, 2022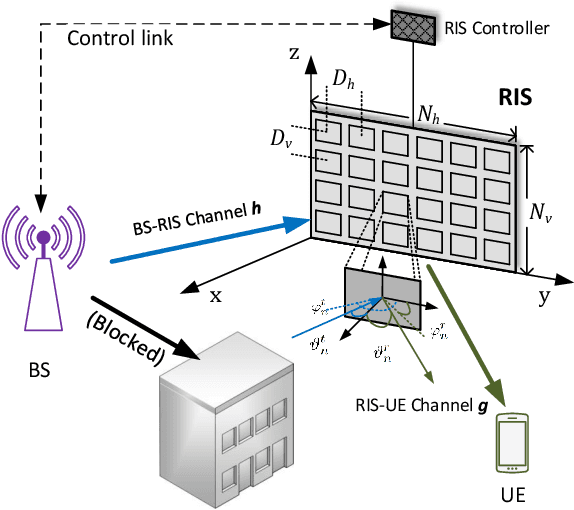
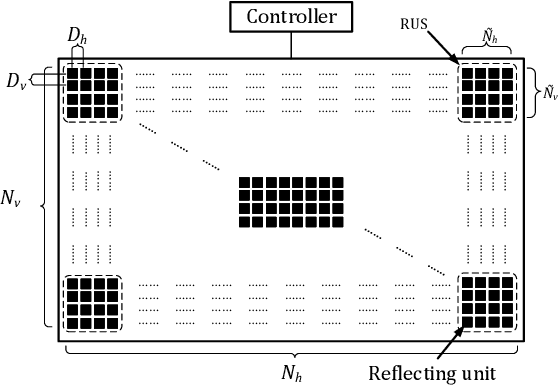
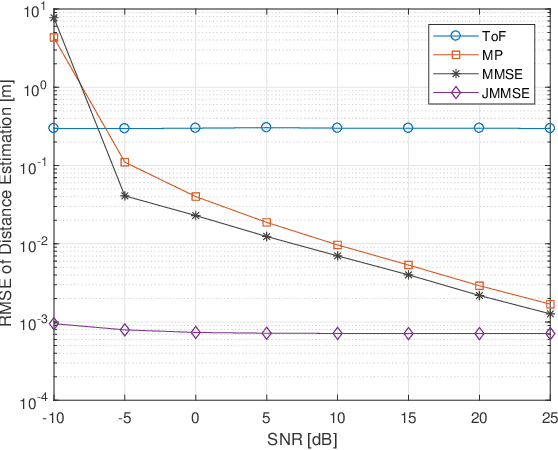
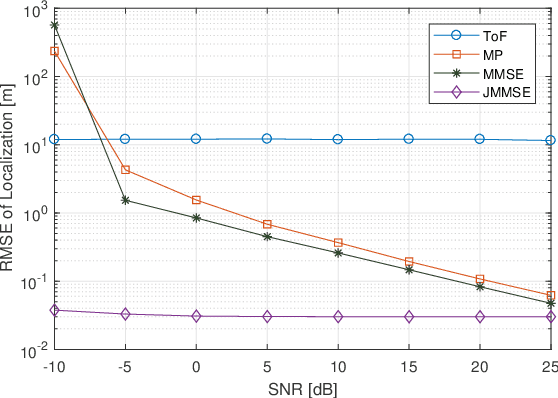
A fundamental challenge in millimeter-wave (mmWave) communication is the susceptibility to blocking objects. One way to alleviate this problem is the use of reconfigurable intelligent surfaces (RIS). Nevertheless, due to the large number of passive reflecting elements on RIS, channel estimation turns out to be a challenging task. In this paper, we address the channel estimation for RIS-aided mmWave communication systems based on a localization method. The proposed idea consists of exploiting the sparsity of the mmWave channel and the topology of the RIS. In particular, we first propose the concept of reflecting unit set (RUS) to improve the flexibility of RIS. We then propose a novel coplanar maximum likelihood-based (CML) 3D positioning method based on the RUS, and derive the Cramer-Rao lower bound (CRLB) for the positioning method. Furthermore, we develop an efficient positioning-based channel estimation scheme with low computational complexity. Compared to state-of-the-art methods, our proposed method requires less time-frequency resources in channel acquisition as the complexity is independent to the total size of the RIS but depends on the size of the RUSs, which is only a small portion of the RIS. Large performance gains are confirmed in simulations, which proves the effectiveness of the proposed method.