 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTorsional-GFN: a conditional conformation generator for small molecules
Jul 15, 2025Generating stable molecular conformations is crucial in several drug discovery applications, such as estimating the binding affinity of a molecule to a target. Recently, generative machine learning methods have emerged as a promising, more efficient method than molecular dynamics for sampling of conformations from the Boltzmann distribution. In this paper, we introduce Torsional-GFN, a conditional GFlowNet specifically designed to sample conformations of molecules proportionally to their Boltzmann distribution, using only a reward function as training signal. Conditioned on a molecular graph and its local structure (bond lengths and angles), Torsional-GFN samples rotations of its torsion angles. Our results demonstrate that Torsional-GFN is able to sample conformations approximately proportional to the Boltzmann distribution for multiple molecules with a single model, and allows for zero-shot generalization to unseen bond lengths and angles coming from the MD simulations for such molecules. Our work presents a promising avenue for scaling the proposed approach to larger molecular systems, achieving zero-shot generalization to unseen molecules, and including the generation of the local structure into the GFlowNet model.
Action abstractions for amortized sampling
Oct 19, 2024As trajectories sampled by policies used by reinforcement learning (RL) and generative flow networks (GFlowNets) grow longer, credit assignment and exploration become more challenging, and the long planning horizon hinders mode discovery and generalization. The challenge is particularly pronounced in entropy-seeking RL methods, such as generative flow networks, where the agent must learn to sample from a structured distribution and discover multiple high-reward states, each of which take many steps to reach. To tackle this challenge, we propose an approach to incorporate the discovery of action abstractions, or high-level actions, into the policy optimization process. Our approach involves iteratively extracting action subsequences commonly used across many high-reward trajectories and `chunking' them into a single action that is added to the action space. In empirical evaluation on synthetic and real-world environments, our approach demonstrates improved sample efficiency performance in discovering diverse high-reward objects, especially on harder exploration problems. We also observe that the abstracted high-order actions are interpretable, capturing the latent structure of the reward landscape of the action space. This work provides a cognitively motivated approach to action abstraction in RL and is the first demonstration of hierarchical planning in amortized sequential sampling.
A theory of continuous generative flow networks
Jan 30, 2023



Generative flow networks (GFlowNets) are amortized variational inference algorithms that are trained to sample from unnormalized target distributions over compositional objects. A key limitation of GFlowNets until this time has been that they are restricted to discrete spaces. We present a theory for generalized GFlowNets, which encompasses both existing discrete GFlowNets and ones with continuous or hybrid state spaces, and perform experiments with two goals in mind. First, we illustrate critical points of the theory and the importance of various assumptions. Second, we empirically demonstrate how observations about discrete GFlowNets transfer to the continuous case and show strong results compared to non-GFlowNet baselines on several previously studied tasks. This work greatly widens the perspectives for the application of GFlowNets in probabilistic inference and various modeling settings.
FedILC: Weighted Geometric Mean and Invariant Gradient Covariance for Federated Learning on Non-IID Data
May 19, 2022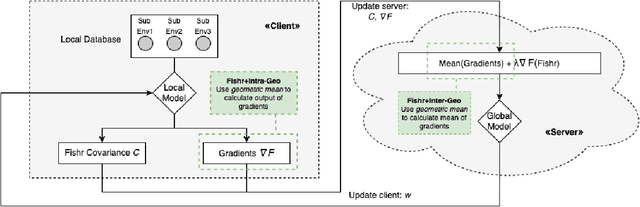
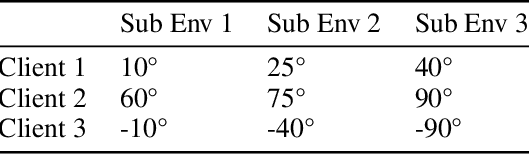
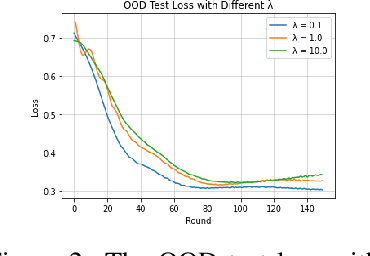
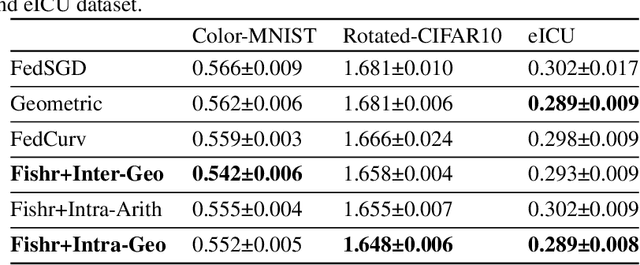
Federated learning is a distributed machine learning approach which enables a shared server model to learn by aggregating the locally-computed parameter updates with the training data from spatially-distributed client silos. Though successfully possessing advantages in both scale and privacy, federated learning is hurt by domain shift problems, where the learning models are unable to generalize to unseen domains whose data distribution is non-i.i.d. with respect to the training domains. In this study, we propose the Federated Invariant Learning Consistency (FedILC) approach, which leverages the gradient covariance and the geometric mean of Hessians to capture both inter-silo and intra-silo consistencies of environments and unravel the domain shift problems in federated networks. The benchmark and real-world dataset experiments bring evidence that our proposed algorithm outperforms conventional baselines and similar federated learning algorithms. This is relevant to various fields such as medical healthcare, computer vision, and the Internet of Things (IoT). The code is released at https://github.com/mikemikezhu/FedILC.