 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian2Scene: 3D Scene Representation Learning via Self-supervised Learning with 3D Gaussian Splatting
Jun 11, 2025



Self-supervised learning (SSL) for point cloud pre-training has become a cornerstone for many 3D vision tasks, enabling effective learning from large-scale unannotated data. At the scene level, existing SSL methods often incorporate volume rendering into the pre-training framework, using RGB-D images as reconstruction signals to facilitate cross-modal learning. This strategy promotes alignment between 2D and 3D modalities and enables the model to benefit from rich visual cues in the RGB-D inputs. However, these approaches are limited by their reliance on implicit scene representations and high memory demands. Furthermore, since their reconstruction objectives are applied only in 2D space, they often fail to capture underlying 3D geometric structures. To address these challenges, we propose Gaussian2Scene, a novel scene-level SSL framework that leverages the efficiency and explicit nature of 3D Gaussian Splatting (3DGS) for pre-training. The use of 3DGS not only alleviates the computational burden associated with volume rendering but also supports direct 3D scene reconstruction, thereby enhancing the geometric understanding of the backbone network. Our approach follows a progressive two-stage training strategy. In the first stage, a dual-branch masked autoencoder learns both 2D and 3D scene representations. In the second stage, we initialize training with reconstructed point clouds and further supervise learning using the geometric locations of Gaussian primitives and rendered RGB images. This process reinforces both geometric and cross-modal learning. We demonstrate the effectiveness of Gaussian2Scene across several downstream 3D object detection tasks, showing consistent improvements over existing pre-training methods.
Vehicles, Pedestrians, and E-bikes: a Three-party Game at Right-turn-on-red Crossroads Revealing the Dual and Irrational Role of E-bikes that Risks Traffic Safety
Nov 04, 2024



The widespread use of e-bikes has facilitated short-distance travel yet led to confusion and safety problems in road traffic. This study focuses on the dual characteristics of e-bikes in traffic conflicts: they resemble pedestrians when interacting with motor vehicles and behave like motor vehicles when in conflict with pedestrians, which raises the right of way concerns when potential conflicts are at stake. Using the Quantal Response Equilibrium model, this research analyzes the behavioral choice differences of three groups of road users (vehicle-pedestrian, vehicle-e-bike, e-bike-pedestrian) at right-turn-on-red crossroads in right-turning lines and straight-going lines conflict scenarios. The results show that the behavior of e-bikes is more similar to that of motor vehicles than pedestrians overall, and their interactions with either pedestrians or motor vehicles do not establish a reasonable order, increasing the likelihood of confusion and conflict. In contrast, a mutual understanding has developed between motor vehicles and pedestrians, where motor vehicles tend to yield, and pedestrians tend to cross. By clarifying the game theoretical model and introducing the rationality parameter, this study precisely locates the role of e-bikes among road users, which provides a reliable theoretical basis for optimizing traffic regulations.
SIFM: A Foundation Model for Multi-granularity Arctic Sea Ice Forecasting
Oct 16, 2024


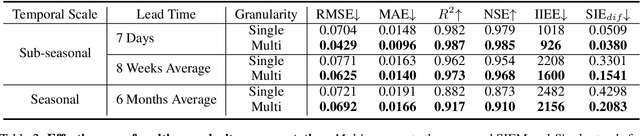
Arctic sea ice performs a vital role in global climate and has paramount impacts on both polar ecosystems and coastal communities. In the last few years, multiple deep learning based pan-Arctic sea ice concentration (SIC) forecasting methods have emerged and showcased superior performance over physics-based dynamical models. However, previous methods forecast SIC at a fixed temporal granularity, e.g. sub-seasonal or seasonal, thus only leveraging inter-granularity information and overlooking the plentiful inter-granularity correlations. SIC at various temporal granularities exhibits cumulative effects and are naturally consistent, with short-term fluctuations potentially impacting long-term trends and long-term trends provides effective hints for facilitating short-term forecasts in Arctic sea ice. Therefore, in this study, we propose to cultivate temporal multi-granularity that naturally derived from Arctic sea ice reanalysis data and provide a unified perspective for modeling SIC via our Sea Ice Foundation Model. SIFM is delicately designed to leverage both intra-granularity and inter-granularity information for capturing granularity-consistent representations that promote forecasting skills. Our extensive experiments show that SIFM outperforms off-the-shelf deep learning models for their specific temporal granularity.
IceDiff: High Resolution and High-Quality Sea Ice Forecasting with Generative Diffusion Prior
Oct 10, 2024Variation of Arctic sea ice has significant impacts on polar ecosystems, transporting routes, coastal communities, and global climate. Tracing the change of sea ice at a finer scale is paramount for both operational applications and scientific studies. Recent pan-Arctic sea ice forecasting methods that leverage advances in artificial intelligence has made promising progress over numerical models. However, forecasting sea ice at higher resolutions is still under-explored. To bridge the gap, we propose a two-staged deep learning framework, IceDiff, to forecast sea ice concentration at finer scales. IceDiff first leverages an independently trained vision transformer to generate coarse yet superior forecasting over previous methods at a regular 25km x 25km grid. This high-quality sea ice forecasting can be utilized as reliable guidance for the next stage. Subsequently, an unconditional diffusion model pre-trained on sea ice concentration maps is utilized for sampling down-scaled sea ice forecasting via a zero-shot guided sampling strategy and a patch-based method. For the first time, IceDiff demonstrates sea ice forecasting with the 6.25km x 6.25km resolution. IceDiff extends the boundary of existing sea ice forecasting models and more importantly, its capability to generate high-resolution sea ice concentration data is vital for pragmatic usages and research.
GS-PT: Exploiting 3D Gaussian Splatting for Comprehensive Point Cloud Understanding via Self-supervised Learning
Sep 08, 2024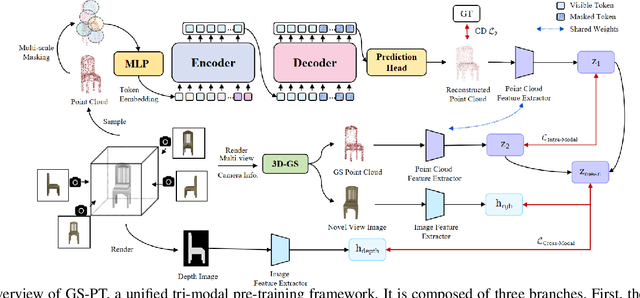
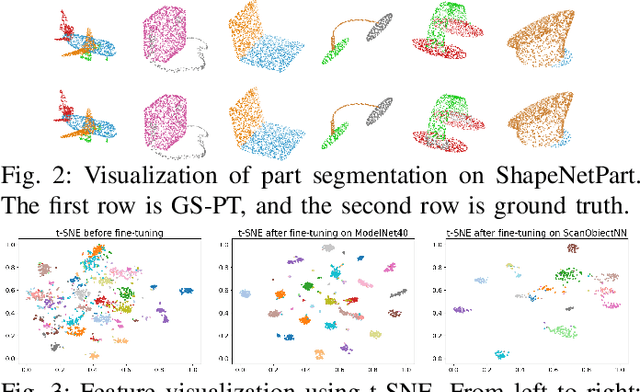
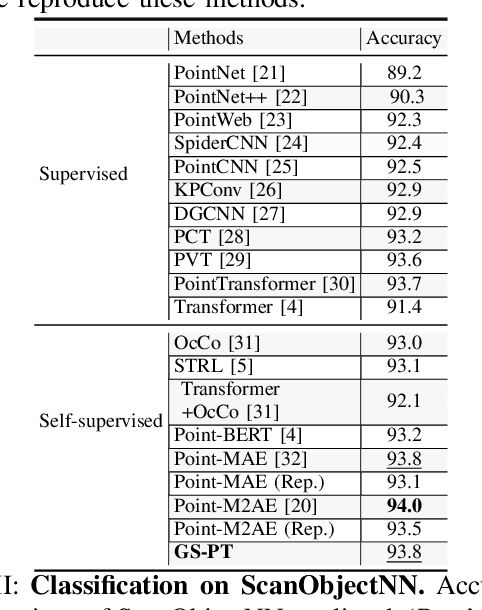
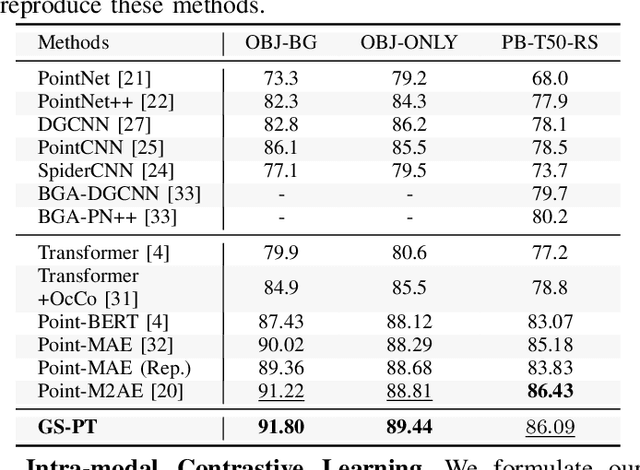
Self-supervised learning of point cloud aims to leverage unlabeled 3D data to learn meaningful representations without reliance on manual annotations. However, current approaches face challenges such as limited data diversity and inadequate augmentation for effective feature learning. To address these challenges, we propose GS-PT, which integrates 3D Gaussian Splatting (3DGS) into point cloud self-supervised learning for the first time. Our pipeline utilizes transformers as the backbone for self-supervised pre-training and introduces novel contrastive learning tasks through 3DGS. Specifically, the transformers aim to reconstruct the masked point cloud. 3DGS utilizes multi-view rendered images as input to generate enhanced point cloud distributions and novel view images, facilitating data augmentation and cross-modal contrastive learning. Additionally, we incorporate features from depth maps. By optimizing these tasks collectively, our method enriches the tri-modal self-supervised learning process, enabling the model to leverage the correlation across 3D point clouds and 2D images from various modalities. We freeze the encoder after pre-training and test the model's performance on multiple downstream tasks. Experimental results indicate that GS-PT outperforms the off-the-shelf self-supervised learning methods on various downstream tasks including 3D object classification, real-world classifications, and few-shot learning and segmentation.
RefGaussian: Disentangling Reflections from 3D Gaussian Splatting for Realistic Rendering
Jun 09, 2024



3D Gaussian Splatting (3D-GS) has made a notable advancement in the field of neural rendering, 3D scene reconstruction, and novel view synthesis. Nevertheless, 3D-GS encounters the main challenge when it comes to accurately representing physical reflections, especially in the case of total reflection and semi-reflection that are commonly found in real-world scenes. This limitation causes reflections to be mistakenly treated as independent elements with physical presence, leading to imprecise reconstructions. Herein, to tackle this challenge, we propose RefGaussian to disentangle reflections from 3D-GS for realistically modeling reflections. Specifically, we propose to split a scene into transmitted and reflected components and represent these components using two Spherical Harmonics (SH). Given that this decomposition is not fully determined, we employ local regularization techniques to ensure local smoothness for both the transmitted and reflected components, thereby achieving more plausible decomposition outcomes than 3D-GS. Experimental results demonstrate that our approach achieves superior novel view synthesis and accurate depth estimation outcomes. Furthermore, it enables the utilization of scene editing applications, ensuring both high-quality results and physical coherence.
A framework for mining lifestyle profiles through multi-dimensional and high-order mobility feature clustering
Dec 01, 2023



Human mobility demonstrates a high degree of regularity, which facilitates the discovery of lifestyle profiles. Existing research has yet to fully utilize the regularities embedded in high-order features extracted from human mobility records in such profiling. This study proposes a progressive feature extraction strategy that mines high-order mobility features from users' moving trajectory records from the spatial, temporal, and semantic dimensions. Specific features are extracted such as travel motifs, rhythms decomposed by discrete Fourier transform (DFT) of mobility time series, and vectorized place semantics by word2vec, respectively to the three dimensions, and they are further clustered to reveal the users' lifestyle characteristics. An experiment using a trajectory dataset of over 500k users in Shenzhen, China yields seven user clusters with different lifestyle profiles that can be well interpreted by common sense. The results suggest the possibility of fine-grained user profiling through cross-order trajectory feature engineering and clustering.