 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal Point Process for Multiple Object Tracking
Feb 05, 2023



Multiple Object Tracking (MOT) focuses on modeling the relationship of detected objects among consecutive frames and merge them into different trajectories. MOT remains a challenging task as noisy and confusing detection results often hinder the final performance. Furthermore, most existing research are focusing on improving detection algorithms and association strategies. As such, we propose a novel framework that can effectively predict and mask-out the noisy and confusing detection results before associating the objects into trajectories. In particular, we formulate such "bad" detection results as a sequence of events and adopt the spatio-temporal point process}to model such events. Traditionally, the occurrence rate in a point process is characterized by an explicitly defined intensity function, which depends on the prior knowledge of some specific tasks. Thus, designing a proper model is expensive and time-consuming, with also limited ability to generalize well. To tackle this problem, we adopt the convolutional recurrent neural network (conv-RNN) to instantiate the point process, where its intensity function is automatically modeled by the training data. Furthermore, we show that our method captures both temporal and spatial evolution, which is essential in modeling events for MOT. Experimental results demonstrate notable improvements in addressing noisy and confusing detection results in MOT datasets. An improved state-of-the-art performance is achieved by incorporating our baseline MOT algorithm with the spatio-temporal point process model.
End-to-end video instance segmentation via spatial-temporal graph neural networks
Mar 07, 2022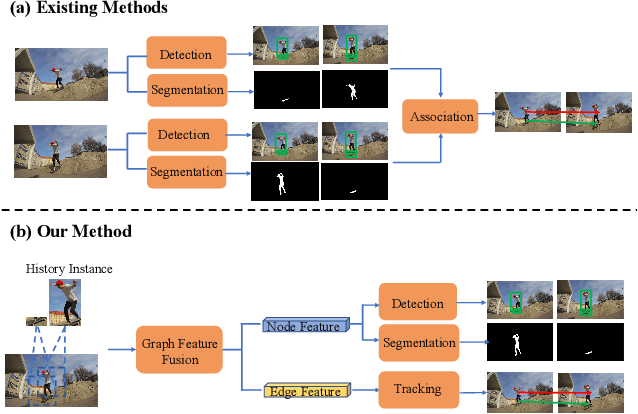
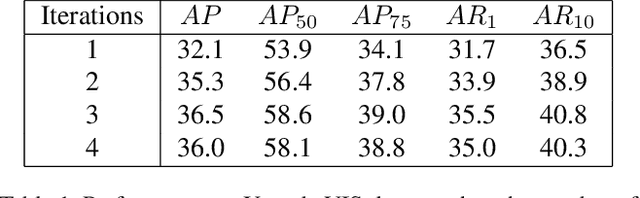
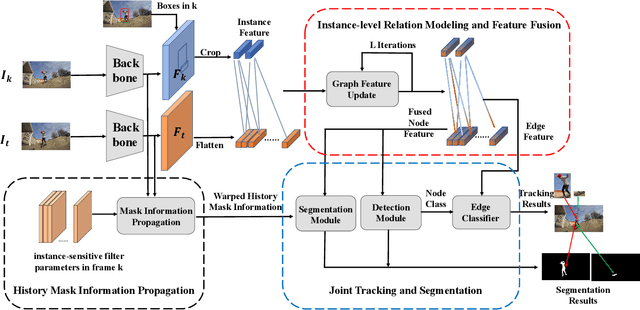
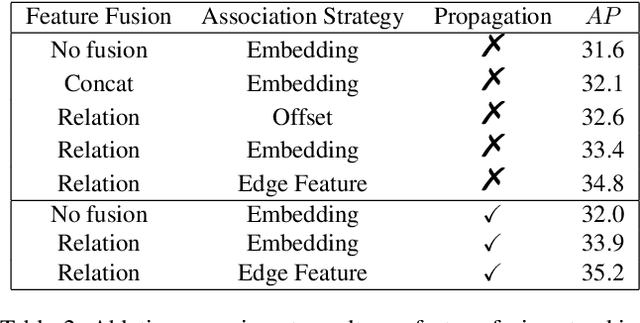
Video instance segmentation is a challenging task that extends image instance segmentation to the video domain. Existing methods either rely only on single-frame information for the detection and segmentation subproblems or handle tracking as a separate post-processing step, which limit their capability to fully leverage and share useful spatial-temporal information for all the subproblems. In this paper, we propose a novel graph-neural-network (GNN) based method to handle the aforementioned limitation. Specifically, graph nodes representing instance features are used for detection and segmentation while graph edges representing instance relations are used for tracking. Both inter and intra-frame information is effectively propagated and shared via graph updates and all the subproblems (i.e. detection, segmentation and tracking) are jointly optimized in an unified framework. The performance of our method shows great improvement on the YoutubeVIS validation dataset compared to existing methods and achieves 35.2% AP with a ResNet-50 backbone, operating at 22 FPS. Code is available at http://github.com/lucaswithai/visgraph.git .
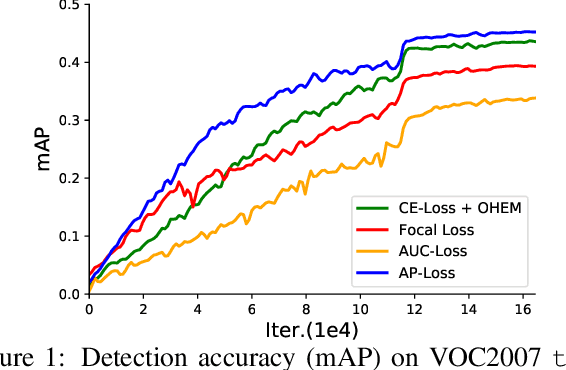
AP-Loss for Accurate One-Stage Object Detection
Aug 17, 2020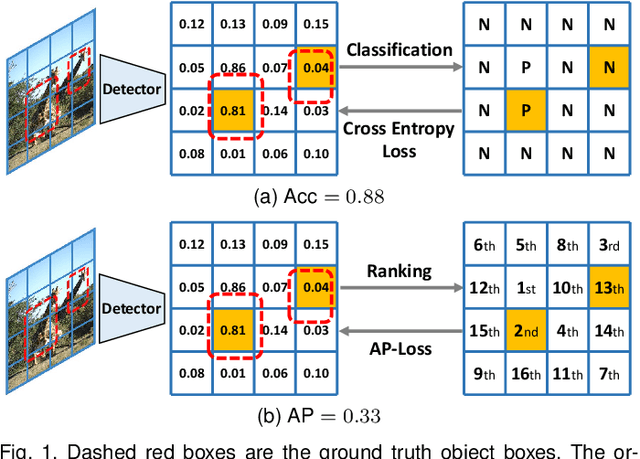
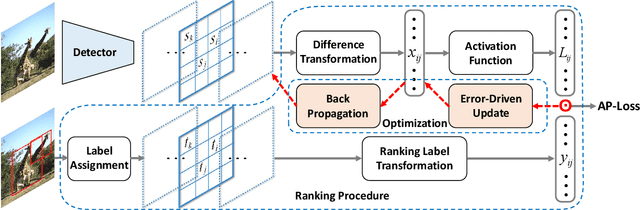

One-stage object detectors are trained by optimizing classification-loss and localization-loss simultaneously, with the former suffering much from extreme foreground-background class imbalance issue due to the large number of anchors. This paper alleviates this issue by proposing a novel framework to replace the classification task in one-stage detectors with a ranking task, and adopting the Average-Precision loss (AP-loss) for the ranking problem. Due to its non-differentiability and non-convexity, the AP-loss cannot be optimized directly. For this purpose, we develop a novel optimization algorithm, which seamlessly combines the error-driven update scheme in perceptron learning and backpropagation algorithm in deep networks. We provide in-depth analyses on the good convergence property and computational complexity of the proposed algorithm, both theoretically and empirically. Experimental results demonstrate notable improvement in addressing the imbalance issue in object detection over existing AP-based optimization algorithms. An improved state-of-the-art performance is achieved in one-stage detectors based on AP-loss over detectors using classification-losses on various standard benchmarks. The proposed framework is also highly versatile in accommodating different network architectures. Code is available at https://github.com/cccorn/AP-loss .
PIoU Loss: Towards Accurate Oriented Object Detection in Complex Environments
Jul 19, 2020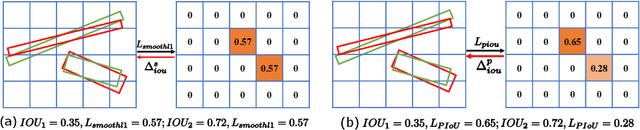
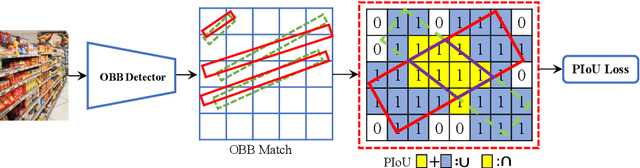
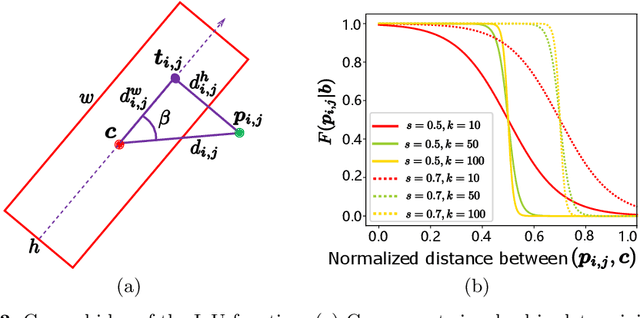
Object detection using an oriented bounding box (OBB) can better target rotated objects by reducing the overlap with background areas. Existing OBB approaches are mostly built on horizontal bounding box detectors by introducing an additional angle dimension optimized by a distance loss. However, as the distance loss only minimizes the angle error of the OBB and that it loosely correlates to the IoU, it is insensitive to objects with high aspect ratios. Therefore, a novel loss, Pixels-IoU (PIoU) Loss, is formulated to exploit both the angle and IoU for accurate OBB regression. The PIoU loss is derived from IoU metric with a pixel-wise form, which is simple and suitable for both horizontal and oriented bounding box. To demonstrate its effectiveness, we evaluate the PIoU loss on both anchor-based and anchor-free frameworks. The experimental results show that PIoU loss can dramatically improve the performance of OBB detectors, particularly on objects with high aspect ratios and complex backgrounds. Besides, previous evaluation datasets did not include scenarios where the objects have high aspect ratios, hence a new dataset, Retail50K, is introduced to encourage the community to adapt OBB detectors for more complex environments.
Towards Accurate One-Stage Object Detection with AP-Loss
Apr 12, 2019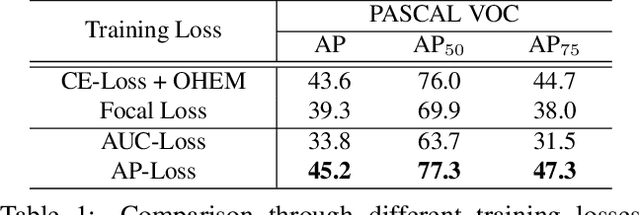
One-stage object detectors are trained by optimizing classification-loss and localization-loss simultaneously, with the former suffering much from extreme foreground-background class imbalance issue due to the large number of anchors. This paper alleviates this issue by proposing a novel framework to replace the classification task in one-stage detectors with a ranking task, and adopting the Average-Precision loss (AP-loss) for the ranking problem. Due to its non-differentiability and non-convexity, the AP-loss cannot be optimized directly. For this purpose, we develop a novel optimization algorithm, which seamlessly combines the error-driven update scheme in perceptron learning and backpropagation algorithm in deep networks. We verify good convergence property of the proposed algorithm theoretically and empirically. Experimental results demonstrate notable performance improvement in state-of-the-art one-stage detectors based on AP-loss over different kinds of classification-losses on various benchmarks, without changing the network architectures.