 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePTDL:Multi-Terrain Fall Recovery via Phase-Terrain Decoupled Learning
Jun 08, 2026Humanoid robots can fall on slopes, gravel, and uneven ground in unstructured environments. We target integrated fall recovery and locomotion: rebuilding balance from a fallen state using proprioception alone and resuming velocity-commanded walking at the fall site. Prior methods often stop at quasi-static rise, neglect the post-fall ground-contact phase, or, when trained on mixed terrains without separating recovery and locomotion phases or per-surface constraints, collapse to a single compromise get-up across surfaces. We propose Phase--Terrain Decoupled Learning (PTDL), which decouples training supervision along phase and terrain axes while deploying one proprioceptive policy. On the phase axis, projected-gravity-gated dual motion-prior discriminators and a probe-to-walk transition link post-fall recovery to commanded walking. On the terrain axis, terrain-stratified recovery shaping assigns surface-specific training supervision on flat ground, gravel, and slopes; terrain labels are training-only and withheld from policy observations, enabling implicit post-fall strategy selection at deployment. We validate PTDL on a 29-DoF Unitree G1 across flat ground, gravel, and slopes up to 20 degrees in simulation and on hardware, achieving stable cross-terrain recovery, smooth recovery-to-locomotion transitions, and differentiated post-fall rise behaviors under one deployed policy.
Autonomous Social Distancing in Urban Environments using a Quadruped Robot
Aug 20, 2020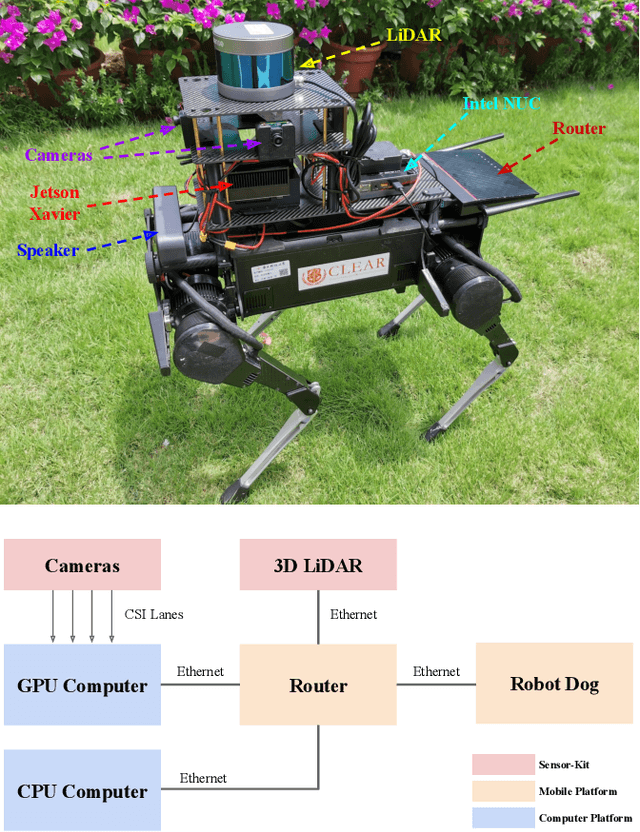
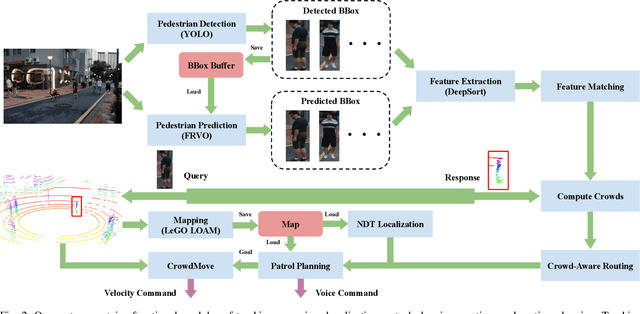
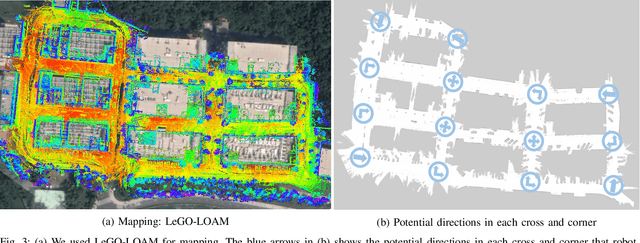
COVID-19 pandemic has become a global challenge faced by people all over the world. Social distancing has been proved to be an effective practice to reduce the spread of COVID-19. Against this backdrop, we propose that the surveillance robots can not only monitor but also promote social distancing. Robots can be flexibly deployed and they can take precautionary actions to remind people of practicing social distancing. In this paper, we introduce a fully autonomous surveillance robot based on a quadruped platform that can promote social distancing in complex urban environments. Specifically, to achieve autonomy, we mount multiple cameras and a 3D LiDAR on the legged robot. The robot then uses an onboard real-time social distancing detection system to track nearby pedestrian groups. Next, the robot uses a crowd-aware navigation algorithm to move freely in highly dynamic scenarios. The robot finally uses a crowd-aware routing algorithm to effectively promote social distancing by using human-friendly verbal cues to send suggestions to over-crowded pedestrians. We demonstrate and validate that our robot can be operated autonomously by conducting several experiments in various urban scenarios.
PIoU Loss: Towards Accurate Oriented Object Detection in Complex Environments
Jul 19, 2020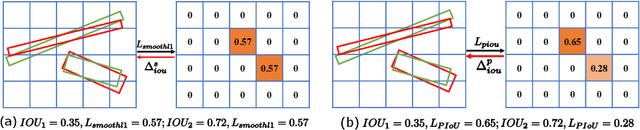
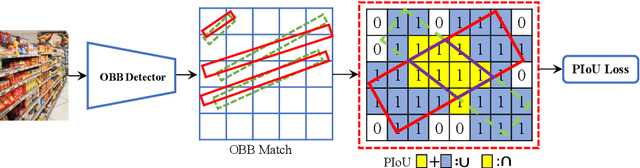
Object detection using an oriented bounding box (OBB) can better target rotated objects by reducing the overlap with background areas. Existing OBB approaches are mostly built on horizontal bounding box detectors by introducing an additional angle dimension optimized by a distance loss. However, as the distance loss only minimizes the angle error of the OBB and that it loosely correlates to the IoU, it is insensitive to objects with high aspect ratios. Therefore, a novel loss, Pixels-IoU (PIoU) Loss, is formulated to exploit both the angle and IoU for accurate OBB regression. The PIoU loss is derived from IoU metric with a pixel-wise form, which is simple and suitable for both horizontal and oriented bounding box. To demonstrate its effectiveness, we evaluate the PIoU loss on both anchor-based and anchor-free frameworks. The experimental results show that PIoU loss can dramatically improve the performance of OBB detectors, particularly on objects with high aspect ratios and complex backgrounds. Besides, previous evaluation datasets did not include scenarios where the objects have high aspect ratios, hence a new dataset, Retail50K, is introduced to encourage the community to adapt OBB detectors for more complex environments.