 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a Shape-memorable Adaptive Pin Array Fixture
May 20, 2020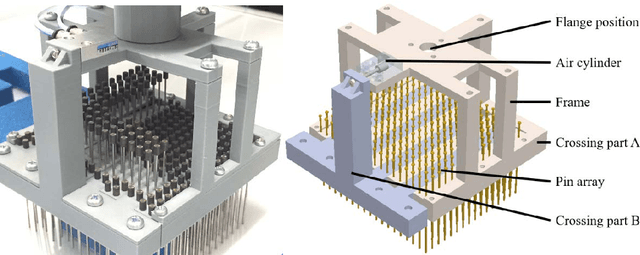

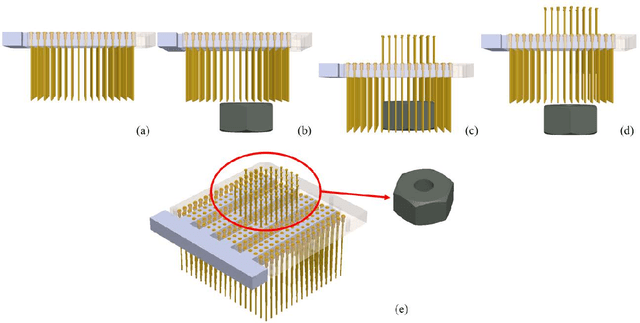

This paper proposes an adaptive pin-array fixture. The key idea of this research is to use the shape-memorable mechanism of pin array to fix multiple different shaped parts with common pin configuration. The clamping area consists of a matrix of passively slid-able pins that conform themselves to the contour of the target object. Vertical motion of the pins enables the fixture to encase the profile of the object. The shape memorable mechanism is realized by the combination of the rubber bush and fixing mechanism of a pin. Several physical peg-in-hole tasks is conducted to verify the feasibility of the fixture.
Functionally Divided Manipulation Synergy for Controlling Multi-fingered Hands
Mar 26, 2020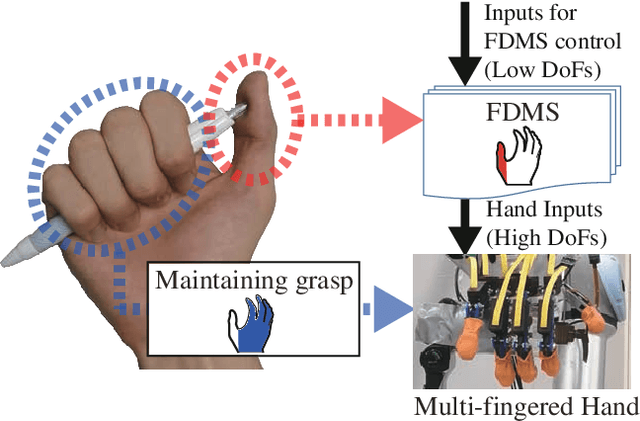
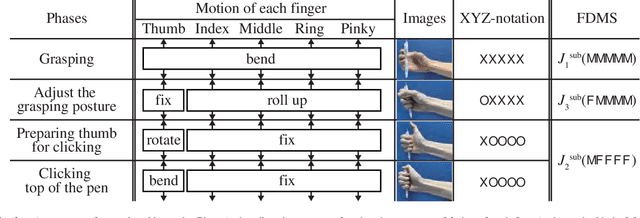
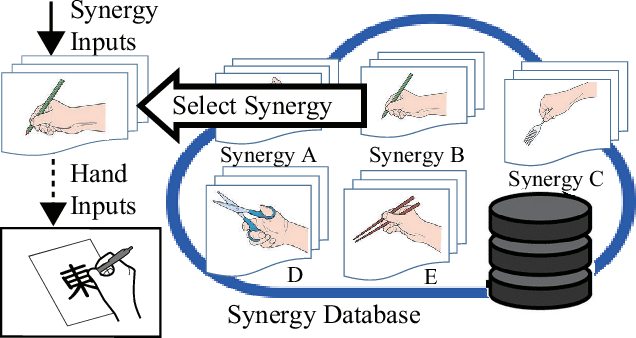
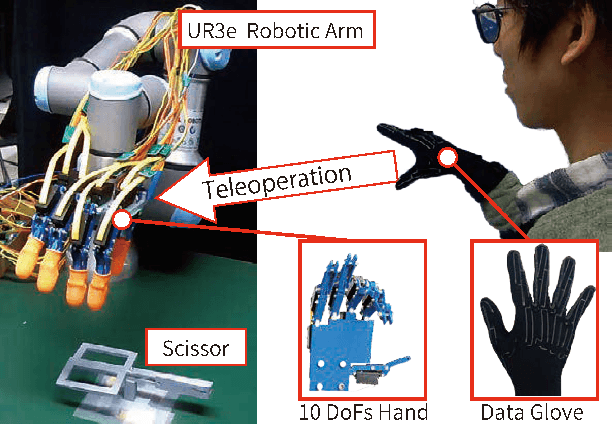
Synergy supplies a practical approach for expressing various postures of a multi-fingered hand. However, a conventional synergy defined for reproducing grasping postures cannot perform general-purpose tasks expected for a multi-fingered hand. Locking the position of particular fingers is essential for a multi-fingered hand to manipulate an object. When using conventional synergy based control to manipulate an object, which requires locking some fingers, the coordination of joints is heavily restricted, decreasing the dexterity of the hand. We propose a functionally divided manipulation synergy (FDMS) method, which provides a synergy-based control to achieves both dimensionality reduction and in-hand manipulation. In FDMS, first, we define the function of each finger of the hand as either "manipulation" or "fixed." Then, we apply synergy control only to the fingers having the manipulation function, so that dexterous manipulations can be realized with few control inputs. The effectiveness of our proposed approach is experimentally verified.
Tool Exchangeable Grasp/Assembly Planner
May 23, 2018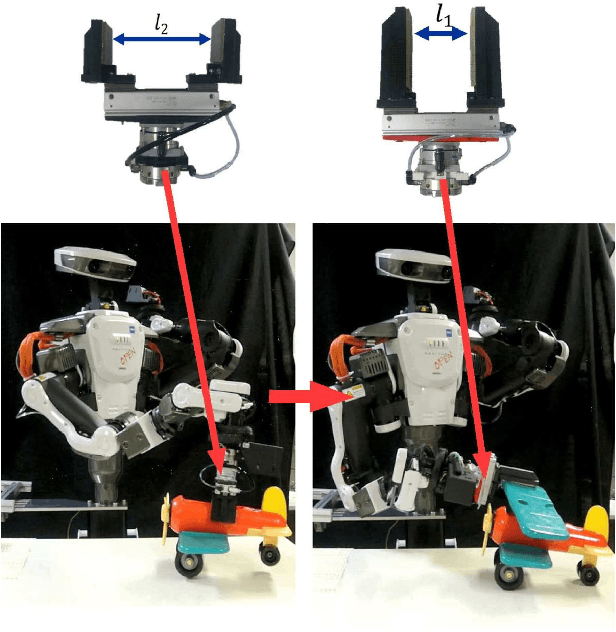
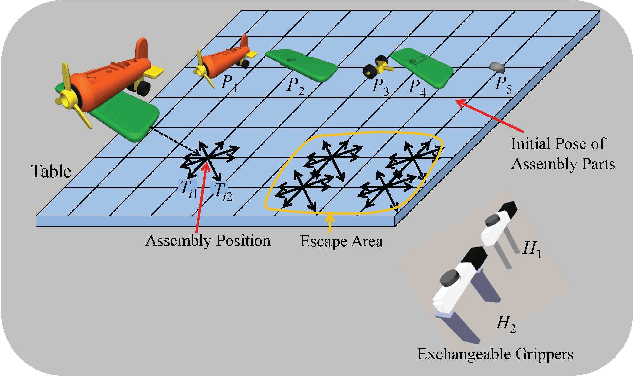
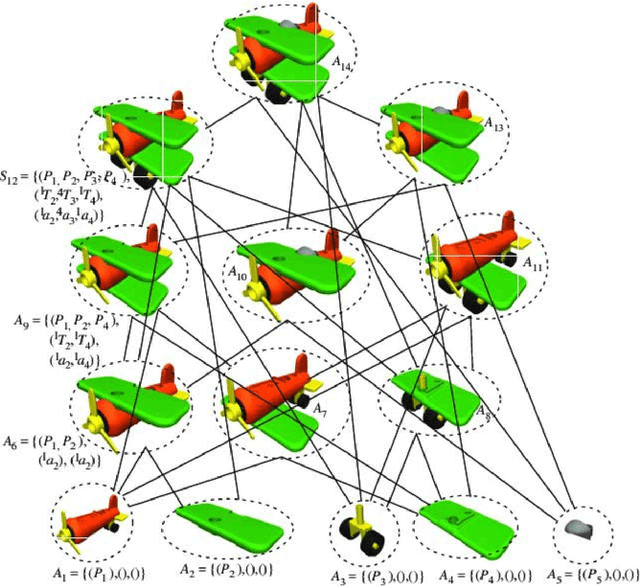
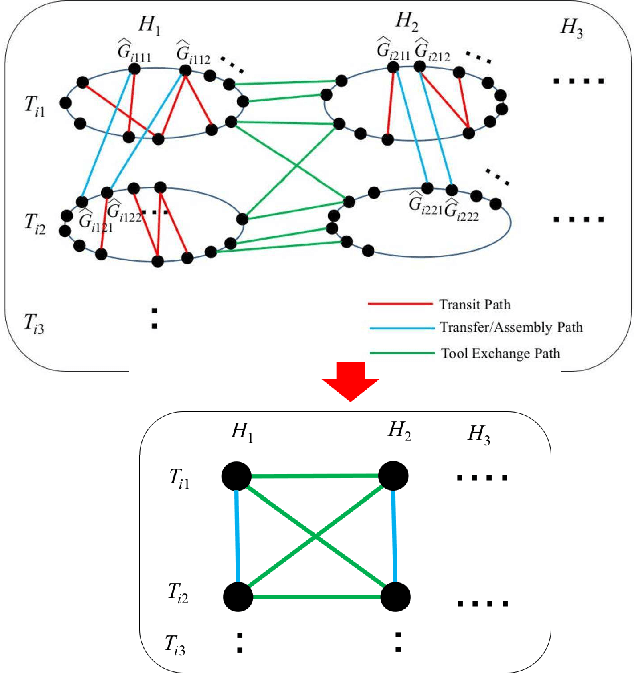
This paper proposes a novel assembly planner for a manipulator which can simultaneously plan assembly sequence, robot motion, grasping configuration, and exchange of grippers. Our assembly planner assumes multiple grippers and can automatically selects a feasible one to assemble a part. For a given AND/OR graph of an assembly task, we consider generating the assembly graph from which assembly motion of a robot can be planned. The edges of the assembly graph are composed of three kinds of paths, i.e., transfer/assembly paths, transit paths and tool exchange paths. In this paper, we first explain the proposed method for planning assembly motion sequence including the function of gripper exchange. Finally, the effectiveness of the proposed method is confirmed through some numerical examples and a physical experiment.
* This is to appear Int. Conf. on Intelligent Autonomous Systems
Experiments on Learning Based Industrial Bin-picking with Iterative Visual Recognition
May 22, 2018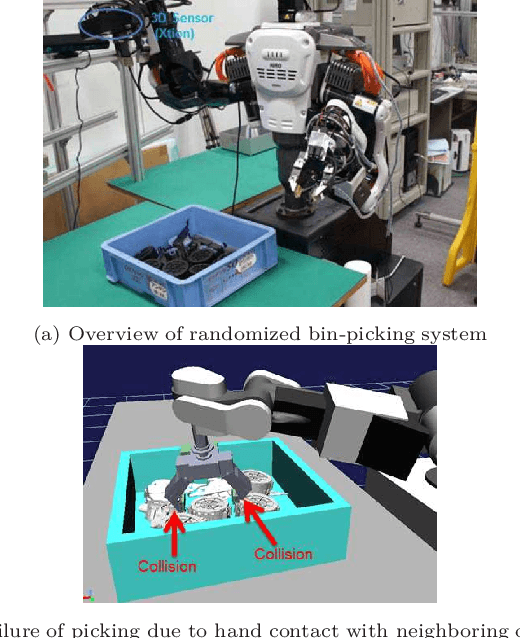
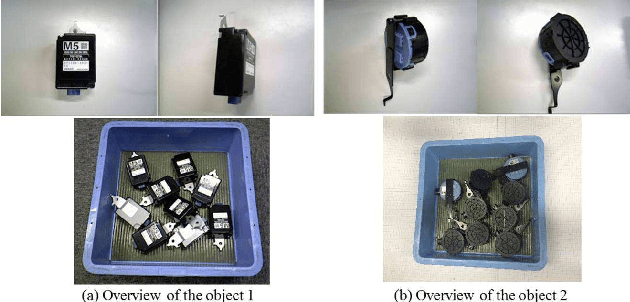
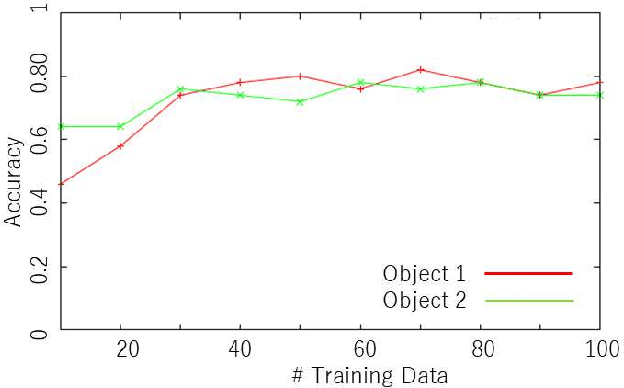
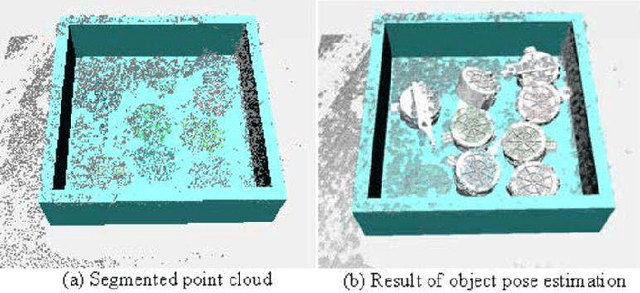
This paper shows experimental results on learning based randomized bin-picking combined with iterative visual recognition. We use the random forest to predict whether or not a robot will successfully pick an object for given depth images of the pile taking the collision between a finger and a neighboring object into account. For the discriminator to be accurate, we consider estimating objects' poses by merging multiple depth images of the pile captured from different points of view by using a depth sensor attached at the wrist. We show that, even if a robot is predicted to fail in picking an object with a single depth image due to its large occluded area, it is finally predicted as success after merging multiple depth images. In addition, we show that the random forest can be trained with the small number of training data.
* This paper is to appear Industrial Robots: an International Journal
Assembly Sequence Planning for Motion Planning
Sep 11, 2016



This paper develops a planner to find an optimal assembly sequence to assemble several objects. The input to the planner is the mesh models of the objects, the relative poses between the objects in the assembly, and the final pose of the assembly. The output is an optimal assembly sequence, namely (1) in which order should one assemble the objects, (2) from which directions should the objects be dropped, and (3) candidate grasps of each object. The proposed planner finds the optimal solution by automatically permuting, evaluating, and searching the possible assembly sequences considering stability, graspability, and assemblability qualities. It is expected to guide robots to do assembly using translational motion. The output provides initial and goal configurations to motion planning algorithms. It is ready to be used by robots and is demonstrated using several simulations and real-world executions.
A Mid-level Planning System for Object Reorientation
Aug 10, 2016
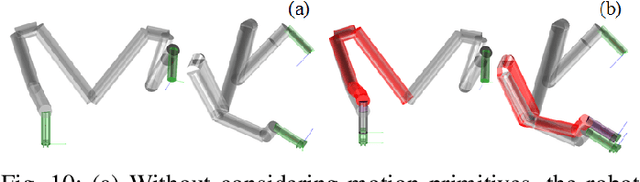

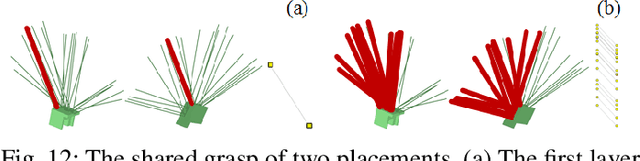
This paper presents a mid-level planning system for object reorientation. It includes a grasp planner, a placement planner, and a regrasp sequence solver. Given the initial and goal poses of an object, the mid-level planning system finds a sequence of hand configurations that reorient the object from the initial to the goal. This mid-level planning system is open to low-level motion planning algorithm by providing two end-effector poses as the input. It is also open to high-level symbolic planners by providing interface functions like placing an object to a given position at a given rotation. The planning system is demonstrated with several simulation examples and real-robot executions using a Kawada Hiro robot and Robotiq 85 grippers.
Iterative Visual Recognition for Learning Based Randomized Bin-Picking
Aug 01, 2016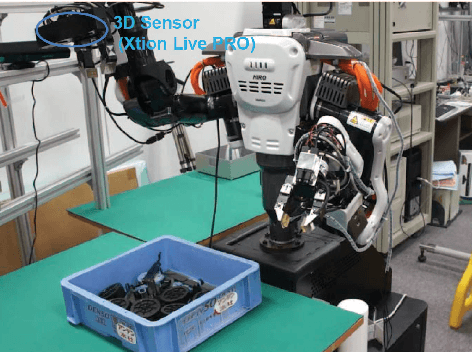
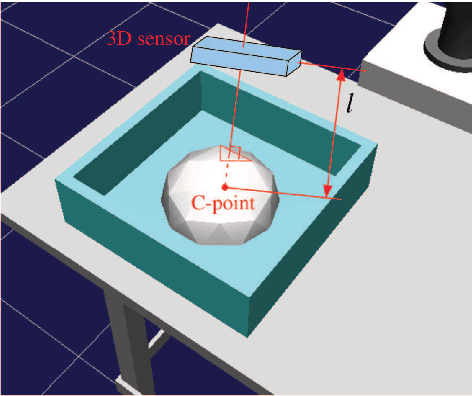
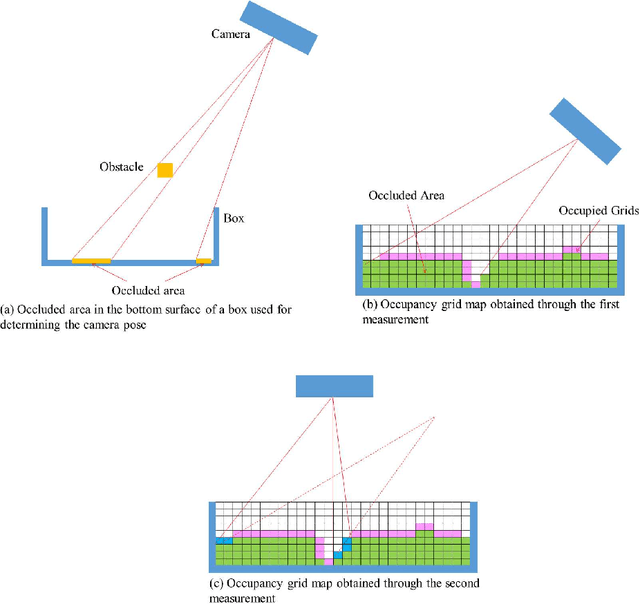
This paper proposes a iterative visual recognition system for learning based randomized bin-picking. Since the configuration on randomly stacked objects while executing the current picking trial is just partially different from the configuration while executing the previous picking trial, we consider detecting the poses of objects just by using a part of visual image taken at the current picking trial where it is different from the visual image taken at the previous picking trial. By using this method, we do not need to try to detect the poses of all objects included in the pile at every picking trial. Assuming the 3D vision sensor attached at the wrist of a manipulator, we first explain a method to determine the pose of a 3D vision sensor maximizing the visibility of randomly stacked objects. Then, we explain a method for detecting the poses of randomly stacked objects. Effectiveness of our proposed approach is confirmed by experiments using a dual-arm manipulator where a 3D vision sensor and the two-fingered hand attached at the right and the left wrists, respectively.
Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects
Jul 11, 2016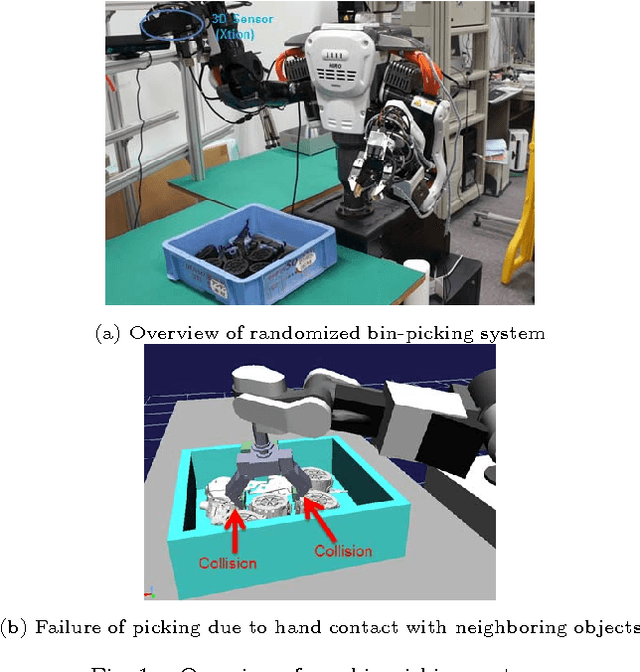
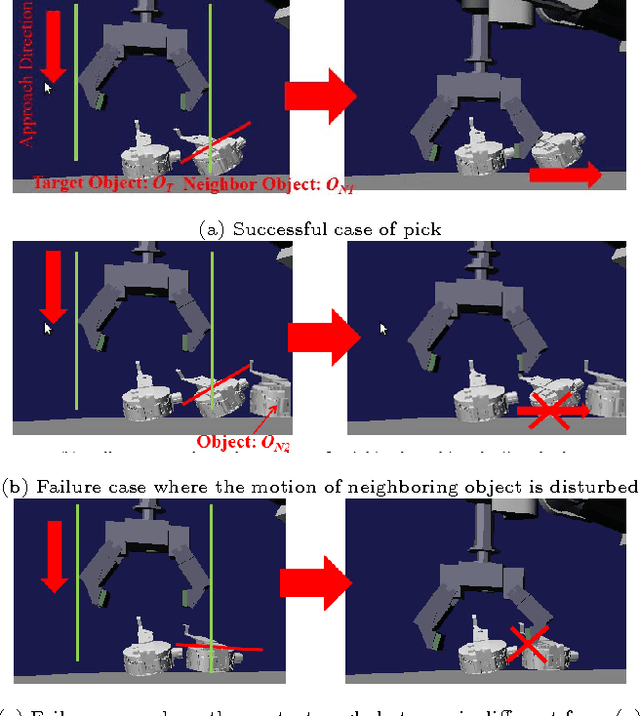
This paper proposes a novel method for randomized bin-picking based on learning. When a two-fingered gripper tries to pick an object from the pile, a finger often contacts a neighboring object. Even if a finger contacts a neighboring object, the target object will be successfully picked depending on the configuration of neighboring objects. In our proposed method, we use the visual information on neighboring objects to train the discriminator. Corresponding to a grasping posture of an object, the discriminator predicts whether or not the pick will be successful even if a finger contacts a neighboring object. We examine two learning algorithms, the linear support vector machine (SVM) and the random forest (RF) approaches. By using both methods, we demonstrate that the picking success rate is significantly higher than with conventional methods without learning.