 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Visual Recognition for Learning Based Randomized Bin-Picking
Paper and Code
Aug 01, 2016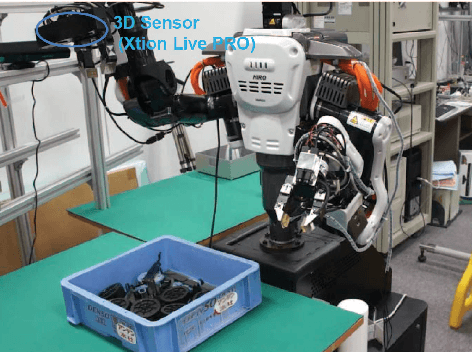
This paper proposes a iterative visual recognition system for learning based randomized bin-picking. Since the configuration on randomly stacked objects while executing the current picking trial is just partially different from the configuration while executing the previous picking trial, we consider detecting the poses of objects just by using a part of visual image taken at the current picking trial where it is different from the visual image taken at the previous picking trial. By using this method, we do not need to try to detect the poses of all objects included in the pile at every picking trial. Assuming the 3D vision sensor attached at the wrist of a manipulator, we first explain a method to determine the pose of a 3D vision sensor maximizing the visibility of randomly stacked objects. Then, we explain a method for detecting the poses of randomly stacked objects. Effectiveness of our proposed approach is confirmed by experiments using a dual-arm manipulator where a 3D vision sensor and the two-fingered hand attached at the right and the left wrists, respectively.