 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperiments on Learning Based Industrial Bin-picking with Iterative Visual Recognition
May 22, 2018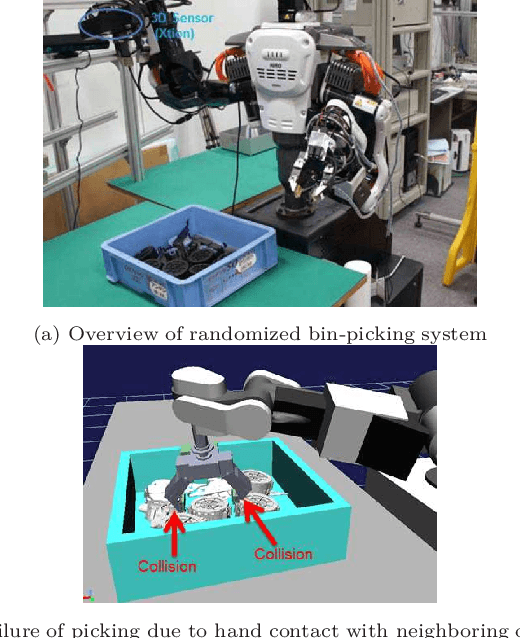
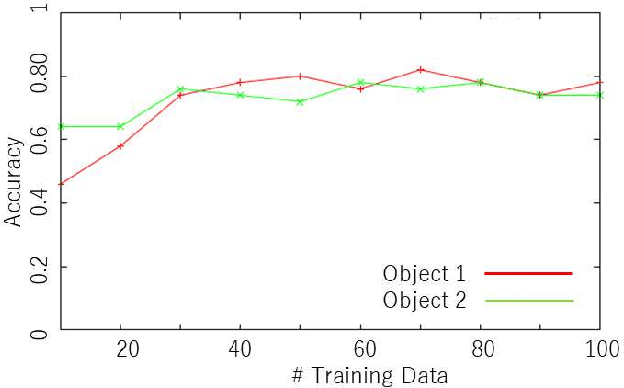
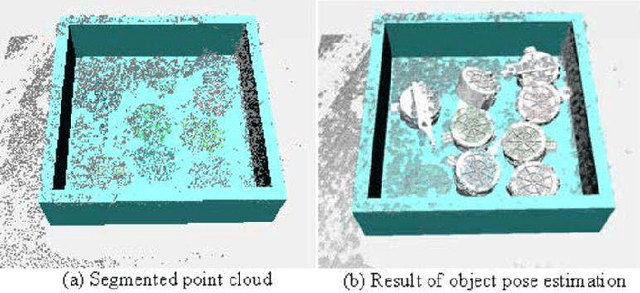
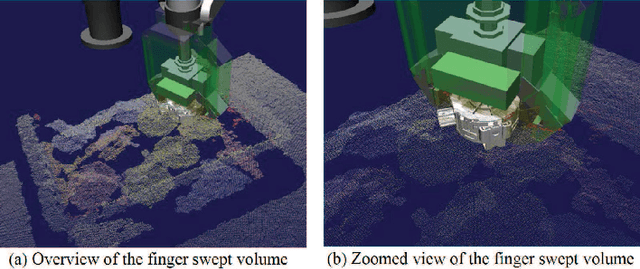
This paper shows experimental results on learning based randomized bin-picking combined with iterative visual recognition. We use the random forest to predict whether or not a robot will successfully pick an object for given depth images of the pile taking the collision between a finger and a neighboring object into account. For the discriminator to be accurate, we consider estimating objects' poses by merging multiple depth images of the pile captured from different points of view by using a depth sensor attached at the wrist. We show that, even if a robot is predicted to fail in picking an object with a single depth image due to its large occluded area, it is finally predicted as success after merging multiple depth images. In addition, we show that the random forest can be trained with the small number of training data.
* This paper is to appear Industrial Robots: an International Journal
Iterative Visual Recognition for Learning Based Randomized Bin-Picking
Aug 01, 2016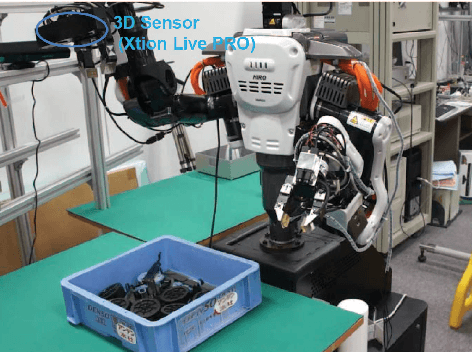
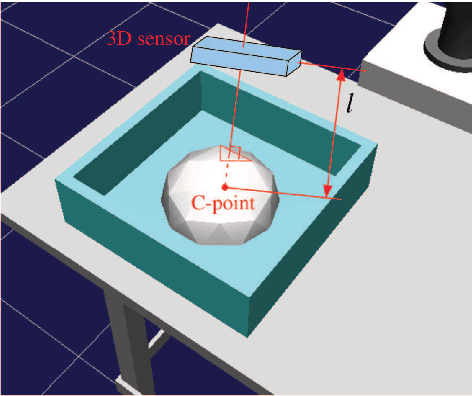
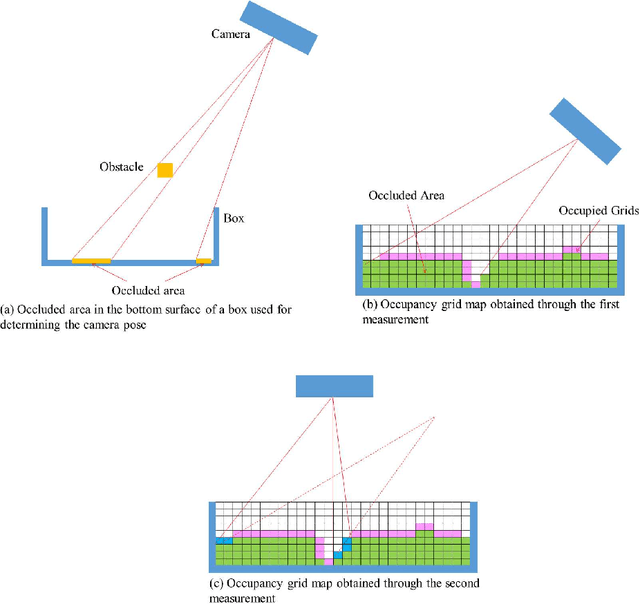
This paper proposes a iterative visual recognition system for learning based randomized bin-picking. Since the configuration on randomly stacked objects while executing the current picking trial is just partially different from the configuration while executing the previous picking trial, we consider detecting the poses of objects just by using a part of visual image taken at the current picking trial where it is different from the visual image taken at the previous picking trial. By using this method, we do not need to try to detect the poses of all objects included in the pile at every picking trial. Assuming the 3D vision sensor attached at the wrist of a manipulator, we first explain a method to determine the pose of a 3D vision sensor maximizing the visibility of randomly stacked objects. Then, we explain a method for detecting the poses of randomly stacked objects. Effectiveness of our proposed approach is confirmed by experiments using a dual-arm manipulator where a 3D vision sensor and the two-fingered hand attached at the right and the left wrists, respectively.
Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects
Jul 11, 2016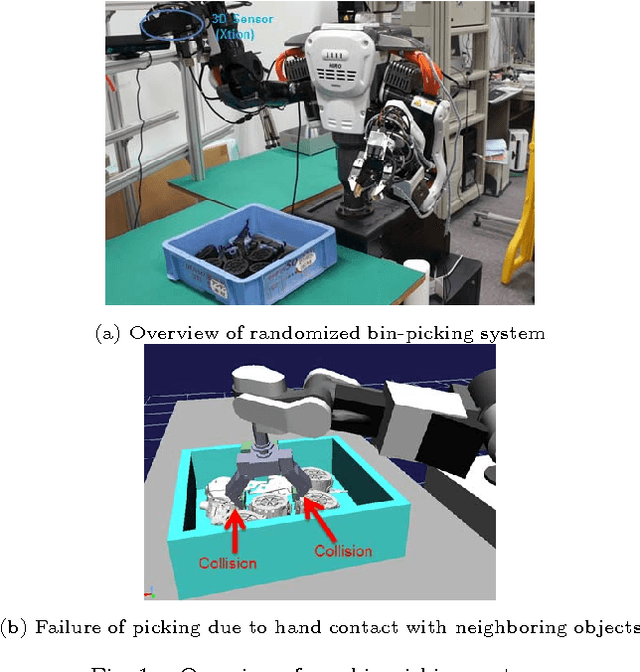
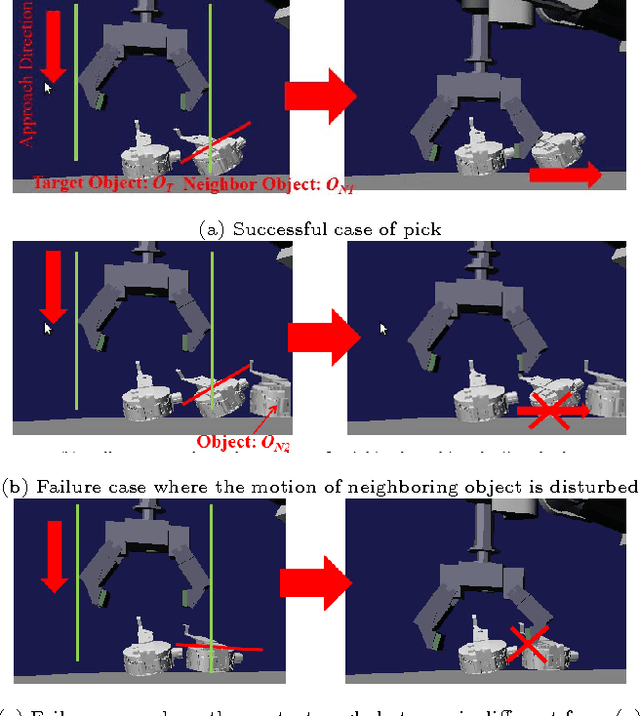
This paper proposes a novel method for randomized bin-picking based on learning. When a two-fingered gripper tries to pick an object from the pile, a finger often contacts a neighboring object. Even if a finger contacts a neighboring object, the target object will be successfully picked depending on the configuration of neighboring objects. In our proposed method, we use the visual information on neighboring objects to train the discriminator. Corresponding to a grasping posture of an object, the discriminator predicts whether or not the pick will be successful even if a finger contacts a neighboring object. We examine two learning algorithms, the linear support vector machine (SVM) and the random forest (RF) approaches. By using both methods, we demonstrate that the picking success rate is significantly higher than with conventional methods without learning.