 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFunctionally Divided Manipulation Synergy for Controlling Multi-fingered Hands
Mar 26, 2020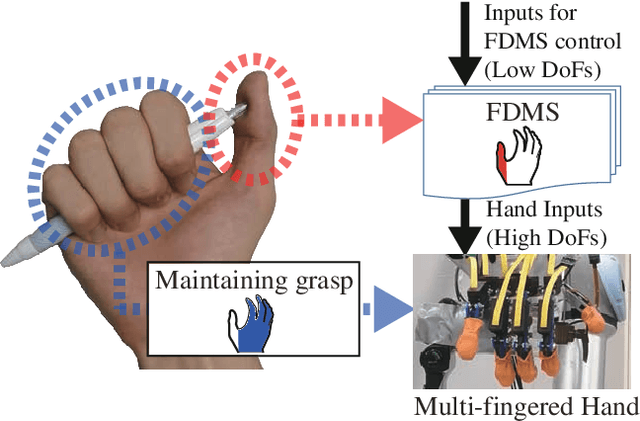
Synergy supplies a practical approach for expressing various postures of a multi-fingered hand. However, a conventional synergy defined for reproducing grasping postures cannot perform general-purpose tasks expected for a multi-fingered hand. Locking the position of particular fingers is essential for a multi-fingered hand to manipulate an object. When using conventional synergy based control to manipulate an object, which requires locking some fingers, the coordination of joints is heavily restricted, decreasing the dexterity of the hand. We propose a functionally divided manipulation synergy (FDMS) method, which provides a synergy-based control to achieves both dimensionality reduction and in-hand manipulation. In FDMS, first, we define the function of each finger of the hand as either "manipulation" or "fixed." Then, we apply synergy control only to the fingers having the manipulation function, so that dexterous manipulations can be realized with few control inputs. The effectiveness of our proposed approach is experimentally verified.